传感器故障诊断与分布式MPC容错控制
2021-04-20刘勇石翠李小兵
刘勇 石翠 李小兵
(工业和信息化部电子第五研究所 广东省广州市 510620)
1 引言
大型工业过程是由许多组件组成的系统,这些组件可以通过物理连接相互作用。由于计算的复杂性和通信带宽的限制,用集中的结构来估计/监视状态或控制这些系统是不容易的[1]。近年来,人们越来越感兴趣的是将一个完整的设备组成几个子系统,然后对每个子系统进行分布式控制和状态估计。分布式控制器设计方法和迭代协调算法引起了人们的广泛关注[2]。
容错控制问题已成为现代控制系统和实际应用中的一个重要课题[3]。现代控制系统需要满足高控制性能和安全要求。对于复杂系统,传感器、执行器或其他系统组件可能存在故障[4],这将导致控制性能下降,甚至导致系统不稳定。为了解决可能出现的故障,许多容错控制方法被提出,以保持理想的稳定性和性能要求[5]。这些方法被称为容错控制系统,可以自动处理故障的影响,同时确保所需的控制性能。容错控制系统一般分为两类[6]。一种称为被动容错控制,在这种控制中,控制器被可靠地设计来处理假定的故障,因此需要一个故障检测和诊断方案或控制器重新配置。另一种是主动容错控制,它可以通过重新配置控制输入以保持可接受的控制性能来主动响应故障。
虽然,容错控制方案受到了诸多关注,但是分布式容错控制方案却很少受到关注。本文针对传感器故障问题,设计分布式故障诊断和容错控制框架,利用分布式卡尔曼滤波方法对故障进行诊断,并设计分布式MPC 进行容错控制。
2 问题描述
本文考虑一类如下形式的一般非线性系统:


通过将非线性模型(1)沿典型工作点进行线性化,得到系统在工作的的线性化模型描述如下:


传感器故障意味着一些系统测量信息不可用于系统控制,使得控制性能下降,甚至导致系统的不稳定性。传感器输出在时间t 时可能出现故障,用以下等式表示:

3 主要成果
本文设计一种分布式容错控制方案,以应对非线性系统中的传感器故障,该控制结构的主要组成部分包括分布式状态估计模块、故障诊断模块和分布式MPC 容错控制。利用分布式卡尔曼滤波对不可测系统状态进行估计,检测和定位发生故障的传感器,故障信息被传输到分布式MPC,以自动处理传感器故障的影响,同时保持所需的控制性能。
3.1 分布式状态估计
对于非线性系统,扩展卡尔曼滤波器是连续线性化非线性系统的离散时间滤波器。在本节中,设计分布式扩展卡尔曼滤波器对状态进行估计。卡尔曼滤波器有两个步骤,即预测步骤和更新步骤[7]。子系统i 的分布式EKFi 给出如下:
(1)预测步骤:

(2)更新步骤:

(1)在t0=0 时,给定初始子系统状态的猜测,并测量子系统输出将其迭代为it=1,并重复以下步骤:
(2)对于tk>0 的时间,每个估计器接收上一次相邻子系统的状态估计值,输出测量值
(6)在下一个采样时间tk+1 执行步骤(2)。
建立了基于分布扩展卡尔曼滤波的状态估计,为容错控制方案做好了准备。
3.2 分布式故障检测与诊断
为了处理重要传感器可能出现的故障,假设有两组传感器系统(p=1,2),以保证其中一套传感器故障时,可以切换到另一套传感器继续运行;本节设计故障诊断方案,假设系统中一次只有一个传感器故障,建立分布式故障诊断模块,该机构可用于检测和定位可能的传感器故障。具体地说,就是为每个子系统开发了一个故障诊断模块,每个模块由几个关键部件组成:局部扩展卡尔曼滤波器、分布式MPC 和残余发生器。状态预测器用于提供参考状态轨迹,并将其发送到相应的残差发生器。通过计算局部分布扩展卡尔曼滤波器给出的状态估计与子系统状态预测的偏差,相关的残差发生器生成剩余信号序列。



在没有传感器故障的情况下,当估计误差收敛到一定的小区域后,每个残差将保持在一定的水平以下。因此,在整个系统的估计误差通过仿真收敛后,考虑子系统估计误差的上界,可以选择合适的子系统残差检测阈值。当考虑非线性过程时,这种处理通常用于阈值选择。基于这种方法,当任何剩余信号超过相应的阈值时,它表示设备发生故障。我们使用此属性来检测和定位各子系统发生的传感器故障。接下来,我们用表示残差信号的检测阈值对于故障诊断机制在每个采样周期内通过网络通信从故障诊断模块的接受残差信号。故障诊断机制将所有残差信号与相应的阈值进行比较。如果任何剩余信号超出其阈值(即则发生传感器故障。
3.3 分布式MPC设计
通常,MPC 以集中的方式执行。然而,对于大型系统(1),本节给出导出分布式MPC 容错控制方案,由于MPC 是在线进行设计的,因此在获知传感器故障时,可以利用冗余的控制器进行重新设计,保证系统的性能。本节将设计离散形式的分布式MPC 算法,即对系统模型(3)进行离散化,得到:

其中,Ad,ii,Bd,ii表示子系统i 对应的系统矩阵;Ad,ij,Bd,ij表示和子系统i 关联的子系统j 对应的系统矩阵;xi(tk+l+1|tk)表示子系统i的状态;yi(tk+l)表示tk+l 时刻子系统i 对应的系统输出;tk+l+1|tk在tk时刻对将来tk+l+1 时刻的预测。
成本函数考虑如下:


然后,通过在每个k 时刻求解以下问题来优化第i 个子系统的输入:

在考虑相邻子系统j 的影响的情况下,考虑了全局成本函数对第i 个控制输入的优化,可以保证在其他子系统的传感器失效的情况下,依靠健康的子系统控制,仍能保证系统的性能。需要注意的是,问题(16)将被转化为二次规划问题 进行求解,需要一种迭代算法来协调分布式控制器,通过给出一个阈值来检查的收敛性:
(6)设置tk=tk+1 并转到第一步。
以上,完成了基于分布式MPC 的部分传感器故障容错控制。
4 仿真验证
考虑如下带有传感器故障的系统:

利用本文所提出的分布式MPC 对该系统进行容错控制,该系统包含两个系统输入,即和本方案中,对两个系统输入进行单独设计,利用故障诊断方法,对系统的传感器故障进行检测,并反馈到分布式MPC 设计中,如果其中一个传感器失效,则利用备用传感器进行控制,保证系统的性能。系统的初始状态为控制时域选择为N=15,状态和输入的权重选择为求黎卡提方程得到终端约束矩阵为:

假设其中一组传感器在k=3 后开始失效,利用本文故障诊断方法,可以在下一个采样时刻(即k=4)时检测到故障的发生。图1-3给出了三个子系统状态的变化情况,图4-5 给出了相应的控制输入情况,将本文方法和无故障情况下的控制性能进行了对比,并引入集中式MPC 的容错控制方法进行对比。与不带故障的控制性能相比,虽然发生故障后性能下降,但是仍能保持较好的性能。结果表明本文能够诊断出带故障的传感器,在发生传感器器失效故障时,仍能够保证系统控制性能,达到和集中式MPC 一致的控制效果。

图1:系统状态1 的动态

图2:系统状态2 的动态
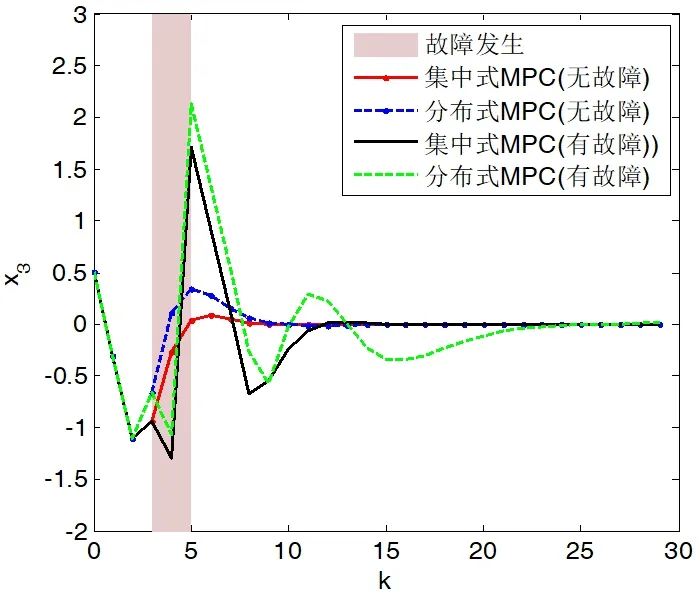
图3:系统状态3 的动态

图4:控制器输入1 的动态

图5:控制器输入2 的动态
5 总结
本文基于分布式MPC 和状态估计的优势,研究了一种分布式容错控制方案,通过提出残差发生器,推导出分布式故障检测诊断模块,研究分布式MPC 框架,开发了故障补偿策略,保证系统在传感器故障情况下的控制性能。
