基于无源侦察幅度的相控阵雷达工作模式仿真
2021-04-20蔺诚毅徐伟
蔺诚毅 徐伟
(西安电子工程研究所 陕西省西安市 710100)
1 引言
电子战在现代信息化战争中扮演着极其主要的角色,已经成为了决定战争胜败的关键因素。电子侦察作为电子战的重要组成部分,对战场电磁态势感知、信息融合、作战部署起着重要作用。一方面随着赋予雷达观测任务的不断增加,另一方面也随着电子技术的不断发展,传统的的机扫雷达已经在功能和性能上很难满足当代战争需求,而相控阵雷达以其天线波束快速扫描、波形快速截变、空间功率合成、多波束形成灵活以及多目标处理等优势,在现代战争中得到了广泛应用,在未来战场的应用前景也十分广阔。根据不同的工作任务,相控阵雷达具有不同的工作模式。各种工作模式在时域和空域上具有不同的天线扫描方式,对侦测目标而言,其威胁等级也不同。为了在提高在战场上的生存能力以及电磁态势感知的能力,对相控阵雷达的工作模式识别已成为电子侦察领域的亟待解决的热点问题。
相控阵雷达的工作模式识别是指通过无源侦察的手段获取雷达信号的特性,生成辐射源报告,再根据报告的信息去分辨相控阵雷达的工作样式。无论是频域或时域中,相控阵雷达的每一种工作模式下,天线波束的扫描方式不尽相同。对于电子侦察方而言,这种变化直接导致其侦收雷达信号幅度产生特定的变化。
雷达工作模式识别的前提是要熟悉其基本工作原理、特点、性能要求,并对其进行建模仿真。目前,雷达工作模式的建模仿真大都是站在雷达系统本身的角度进行的,目的是为了给雷达系统的设计提供参考,模型的设计准则更多的是考虑目标特性和应用场景的变化,并没有站在电子侦察方的角度去考虑。本文通过对相控阵雷达主要工作模式及天线阵面扫描方式的分析,从电子侦察的视角搭建了一套机载运动场景下的侦收幅度信息模型,为后续的工作模式识别奠定了基础。
2 相控阵雷达主要工作模式及扫描方式
一般来说,相控阵具有搜索和跟踪两种基本的工作模式。搜索模式用来监视雷达扫描空域中可能存在的新目标,由于此时没有扫描空域内目标的先验信息,需要按搜索程序规定自主搜索。在搜索过程中发现目标后,经过目标确认后转入跟踪模式。两种方式最大的差别在于其数据率的不同。当雷达波束搜索完规定的空域后,再次重新去搜索该空域时的时间间隔为搜索间隔时间,其倒数即为搜索数据率。而雷达处于跟踪状态时,对同一个目标相邻两次的照射时间为跟踪间隔时间,它的倒数即为对该目标的跟踪数据率。对于相控阵雷达而言,通常其搜索空域覆盖较大,所以搜索时长较长,间隔也较长,因此搜索数据率一般偏低;但要确保目标航迹精度,提高目标的截获概率,以及跟踪的稳定性,必须有较高的跟踪数据率。按照跟踪数据率从低到高的划分,主要的工作模式分为边扫描边跟踪模式(TWS)、搜索加跟踪模式(TAS)和单目标跟踪模式(STT)。
2.1 边扫描边跟踪模式(TWS)
TWS 工作模式通常用于方位上为窄波束,仰角上为宽波束的相控阵雷达。在搜索时,天线波束依次掠过搜索空域,再不断重复。此模式下主要完成搜索任务,因此跟踪式不要求有高的跟踪率,也不对跟踪进行单独采样,所以跟踪精度低,但控制相对简单。其天线扫描方式如图1 所示。
如图1所示,天线阵面共有55个波位,其中方位11个,俯仰5个。工作时,波束按照以上排布依次扫描,通常每个波位上的驻留时间一致,所以搜索间隔和跟踪间隔一样。意味着新目标的检测与老目标的跟踪以同样的方式进行,没有专门设定跟踪照射波位。
2.2 搜索加跟踪模式(TAS)
TAS 模式是相控阵雷达独有的,它将跟踪时间安插在搜索时间内,既对搜索数据率尽可能地放宽要求以节省系统资源,又保证跟踪的稳定性和跟踪精度。当天线波束还没搜索完整个空域时,由于跟踪数据率比搜索数据了高得多,当跟踪时间到达,必须中断搜索过程,将天线波束用于跟踪。那么,其天线扫描方式如图2 所示。
由图2 可知,目标出现在第三个俯仰位中的第七个方位波位,阵面每搜索完七个波位后对目标进行一次跟踪照射。跟踪时间片完成后继续之前的搜索工作,直至完成整个监视空域的搜索任务。
2.3 单目标跟踪模式(STT)
单目标跟踪模式是在相控阵雷达发现目标后,根据战术需要对其进行锁定和持续跟踪。此时,阵面波束会连续对其采取高数据率采样,此模式几乎占据了所有的系统资源,以确保对目标跟踪的精度和可靠性。
3 机载运动场景下电子侦察模型的构建
相控阵雷达布设于整个场景的坐标原点,其天线相控阵为均匀分布式平面阵。其方向图 为:

λ 为波长,d1为行阵元间距,d2为列阵元间距,θ0和φ0分别表示俯仰和方位角度指向。
假设相控阵雷达频率12GHz,行阵元间距14mm,列阵元间距15mm,行阵元数为128,列阵元数为32,且加权系数为泰勒级数,其天线方向如图3 所示。
通常电子侦察设备都具备侧向功能,设定其侧向精度为0.1 度。侦察平台在雷达波束覆盖范围内的空域以一定速度匀速运动,其侦察空域覆盖雷达位置。根据以上场景以及雷达波速扫描方式分别仿真得出相控阵雷达TWS、TAS 和STT 三种模式下无源侦察幅度特征图,如图4、图5、图6 所示。
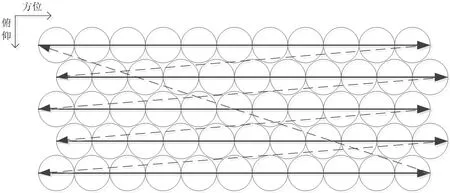
图1:相控阵雷达TWS 模式天线扫描示意图
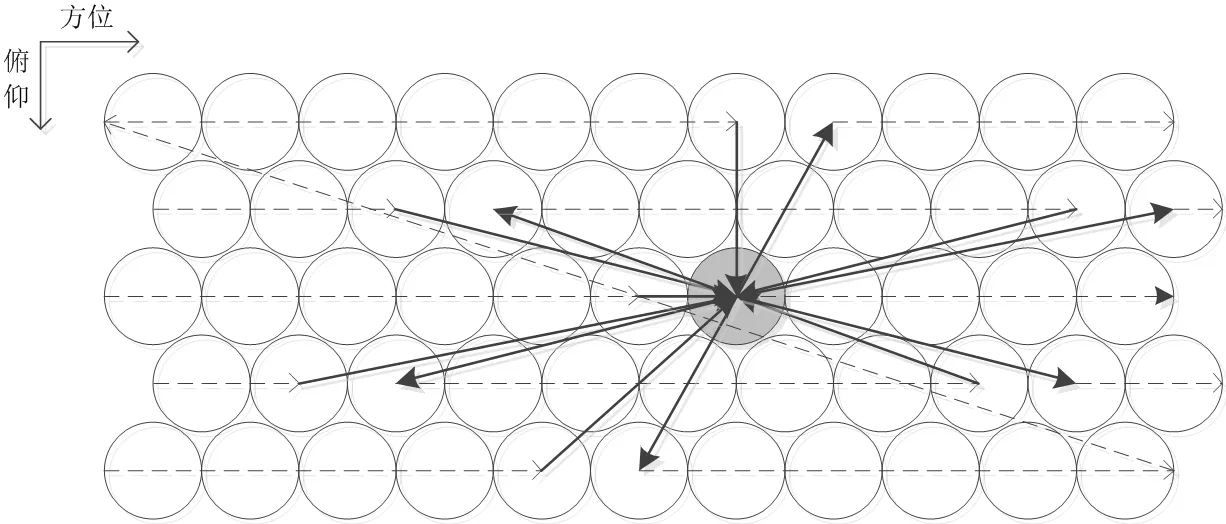
图2:相控阵雷达TAS 模式天线扫描示意图
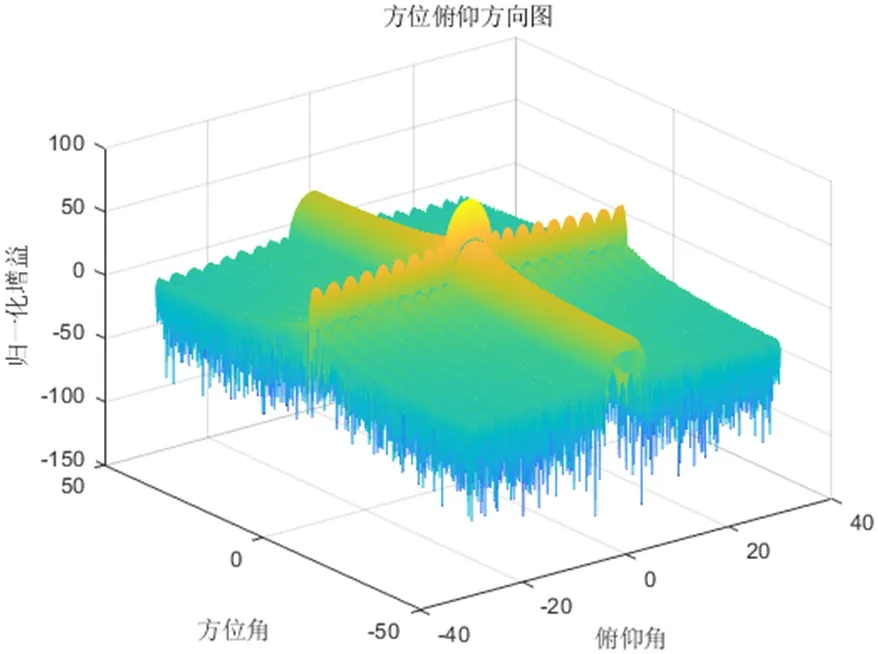
图3:三维天线方向图
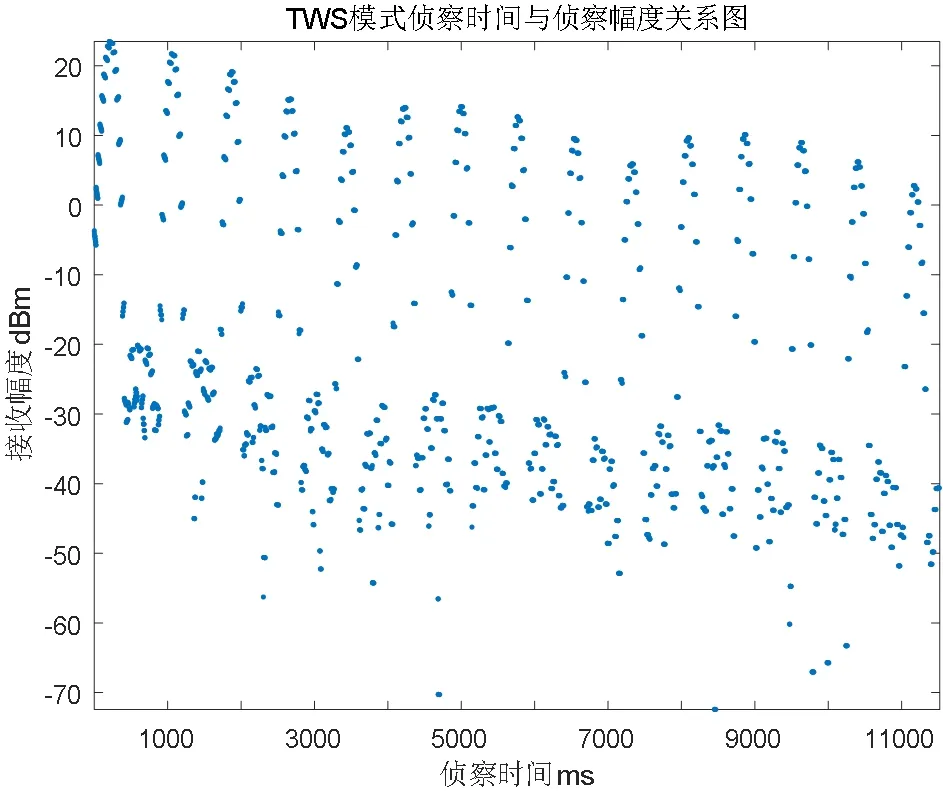
图4
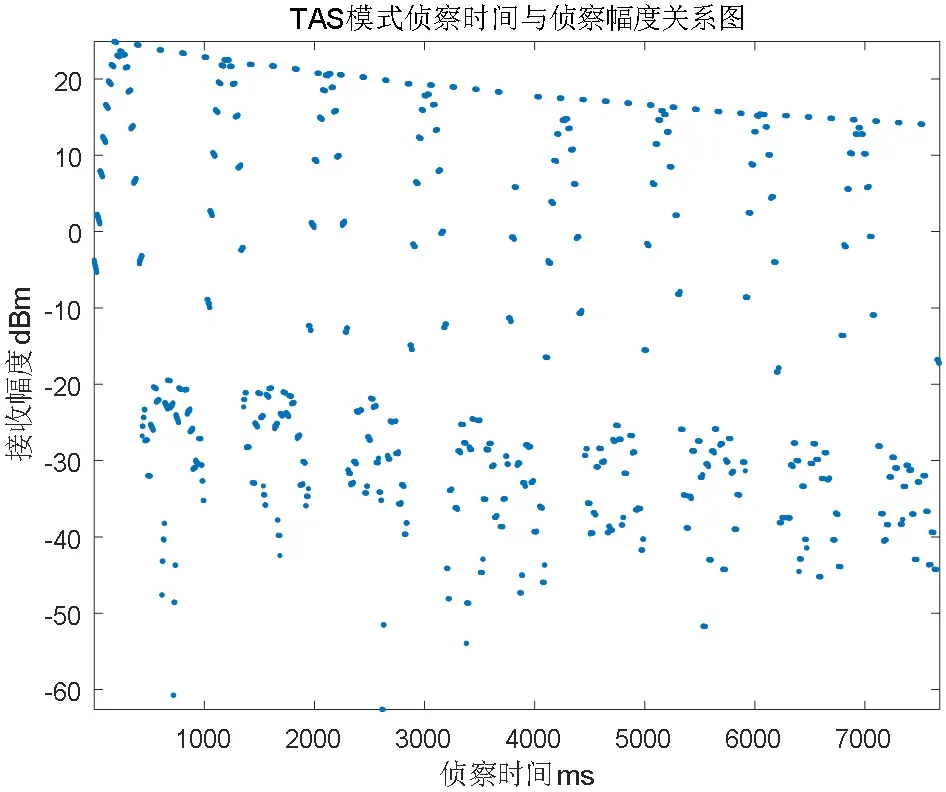
图5
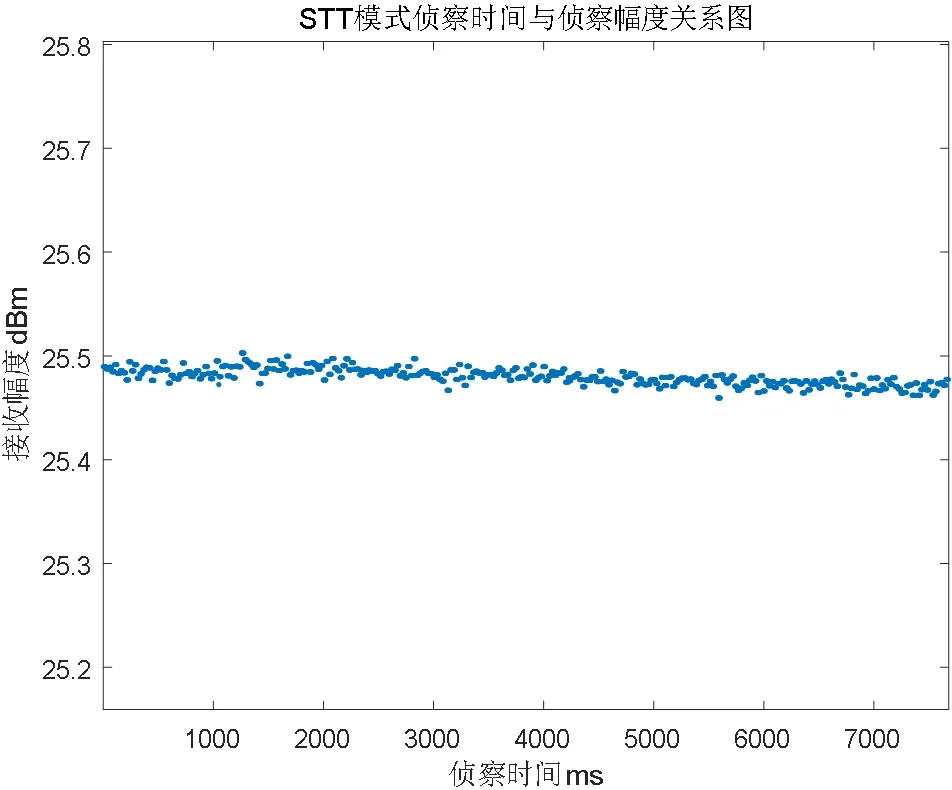
图6
由图可以看出,雷达在TWS 和TAS 模式下,由于方位波束宽度窄而俯仰波束宽度宽,侦察机接收幅度变化主要取决于方位波束扫描,图中也可以明显看到雷达在俯仰维上包含五个扫描波位。因为目标在运动,因此在下一个雷达扫描周期的侦察机接收幅度也随着距离的变化而改变。在STT 模式中,由于雷达的波束始终锁定在侦察机方向,所以侦察幅度变化不大。
4 结束语
本文介绍了相控阵雷达三种典型工作模式及天线扫描方式,并模拟了一个运动过程中机载无源侦察机对雷达信号幅度进行截获的场景。仿真得出三种模式下无源侦察的幅度数据,可以为进一步的相控阵雷达工作模式识别起到一定的支撑作用。实际上相控阵雷达系统非常复杂,所以它的工作样式也十分灵活,加之电磁波在空间传输过程的各种因素的影响,幅度信息的不确定性有待进一步分析和研究。
