一种门限实时自适应的小目标跟踪处理方法
2021-04-15俞成龙
俞成龙,陈 旭
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
跟踪雷达的使命任务是在复杂的气象、海情和电子战环境下,对敌方飞机、舰艇及来袭反舰导弹等目标进行快速捕获和高精度连续稳定跟踪[1],实时向舰炮和防空导弹武器系统提供目标的精确定位数据,供火控系统解算后引导武器,达到有效杀伤敌方来袭目标的目的。
跟踪雷达在对低空小目标捕获转跟踪或连续跟踪过程中,需要从杂波中检测出目标的回波,并对目标的回波幅度进行门限判别,如目标回波幅度满足跟踪条件,则对目标进行跟踪。通常我们采用的中心门限为固定门限,门限值基本为经验值,但是在真实的复杂杂波背景环境下,地杂波、海杂波、气象杂波及箔条杂波等是不固定的非合作目标回波,而且自动增益控制(AGC)是随跟踪波门内回波的起伏而变化的,较强的杂波容易造成AGC变化,引起接收机通道增益的减小,杂波中的目标回波幅度也相应变小,使得目标回波幅度过不了中心门限,导致目标的漏测或者跟丢。根据经验设计的固定门限值存在缺陷,门限值过低会造成较高的虚警,将杂波检测为目标进行跟踪处理;门限值过高会将小目标误认为杂波,造成目标的漏测或跟丢。可见,中心门限将直接影响到雷达能否有效捕获和连续稳定跟踪目标,尤其是复杂的杂波背景下的掠海飞行小目标,因此中心门限的计算和设计方法非常重要。
1 检测处理方法概述
跟踪雷达接收目标指示,方位调舷到位后进行俯仰角度捕获扫描,同时信号处理根据距离指示值设置距离波门,在扫描过程中信号处理机判断波门内目标回波幅度超过捕获门限后,雷达天线停止扫描,信号处理机将跟踪波门移到目标回波中心,选取目标回波中心前后各L个点的回波幅度,实时自适应地计算中心门限,判断被测目标回波是否超过中心门限。若目标回波超过中心门限,则雷达转入目标跟踪状态,并在跟踪过程中实时更新中心门限,保证稳定跟踪;若目标回波未超过中心门限,则天线继续扫描进行目标捕获。
2 中心门限实时自适应的小目标检测处理办法
2.1 跟踪雷达工作原理简介
跟踪雷达工作原理如图1所示,雷达在定时器的时序控制下,发射机将发射激励信号进行功率放大,通过收发开关和雷达天线将电磁波向空间定向辐射,电磁波在遇到目标后产生后向散射,形成目标和杂波回波,通过雷达天线和收发开关传送至接收机[2],接收机将处理过的中频信号传送到信号处理机,信号处理机对中频信号进行采样、下变频、脉压等一系列处理后,再进行目标捕获和距离跟踪,并产生数字角误差信号,伺服系统根据信号处理机产生的角误差信号、当前天线指向数据、舰船摇摆数据等进行相关处理驱动天线对准目标,完成对目标的闭环跟踪。综合显控系统对雷达整机工作状态和工作参数进行监控并干预。
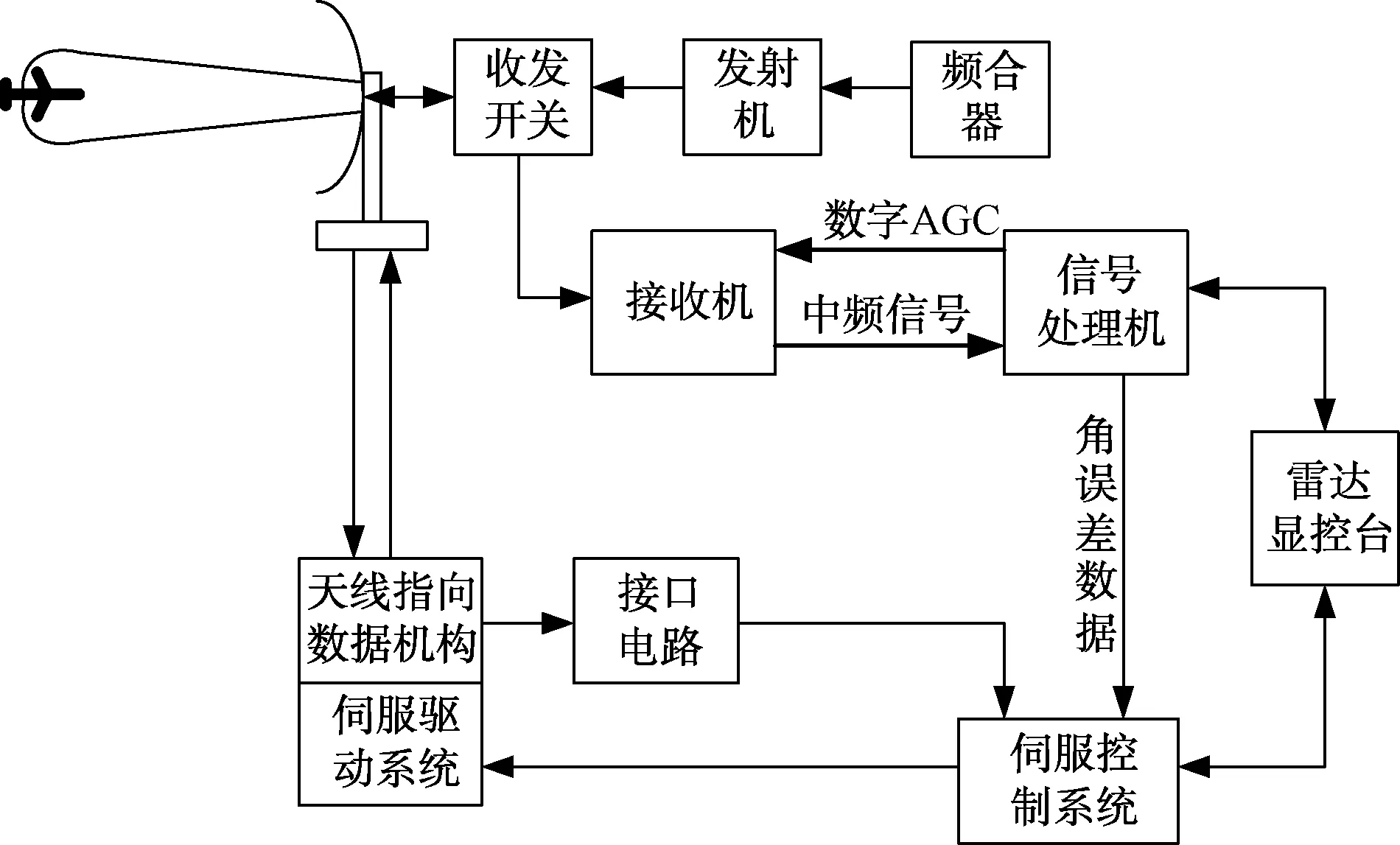
图1 跟踪雷达工作原理框图
2.2 实时自适应计算中心门限的小目标检测处理方法
跟踪雷达接收到情报台或火控台的目标指示,雷达方位调舷到位后进行俯仰捕获扫描(三维目指情况下可统筹雷达波束宽度和目指精度,仰角小角度扫描或不扫描,减少系统反应时间),同时信号处理根据距离指示设置距离波门,在目标扫描捕获过程中,信号处理机判断波门内目标回波超过捕获门限后,雷达天线停止扫描,信号处理机将跟踪波门移到目标回波中心,选取目标回波中心前后各L个点的回波幅度,计算出中心门限,判断被测目标回波是否超过中心门限。若目标回波超过中心门限,则雷达转入目标跟踪状态,并在跟踪过程中实时更新中心门限,保证稳定跟踪;若目标回波未超过中心门限,则天线继续扫描进行目标捕获。具体工作流程如图2所示。

图2 跟踪雷达快速捕获和稳定跟踪目标流程图
雷达整机加电,通过天线对外发射和接收目标回波信号,接收机对回波信号进行放大、滤波、增益控制,将归一化后的中频信号送给信号处理机,信号处理机根据距离波门的位置对距离波门内提取的对数和路与线性和路通道的基带视频数据进行处理[3],实时生成数字AGC控制码,接收机在AGC控制码的控制下实时改变中频放大器输出的中频信号幅度。雷达接收目标指示数据,信号处理机根据目指距离数据移动捕获波门到相应位置,伺服系统进行方位调弦到位,并根据目标类型进行仰角捕获扫描,当检测到目标回波幅度超过捕获门限时,天线在俯仰方向上停止扫描,信号处理机将跟踪波门移到目标回波的中心位置,进行目标检测和跟踪,信号处理机根据跟踪波门的中心位置,选取目标中心波门位置前后各L个点(每个点表示1个距离处理单元)的回波幅度,计算出中心门限,判断目标回波幅度是否过中心门限。如果是则雷达转入对目标的跟踪状态,在目标跟踪过程中实时更新中心门限,对目标保持稳定跟踪。如果未超过中心门限,则继续进行目标捕获;同时如目标回波幅度未超过捕获门限,则继续进行扫描捕获。中心门限U0的计算过程如图3所示。
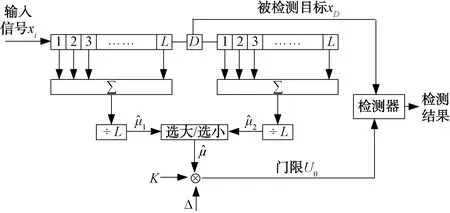
图3 中心门限实时计算框图

2.3 典型海情下目标跟踪仿真结果
利用1套跟踪雷达、目标和杂波信号模拟设备、目标指示模拟设备进行半实物仿真验证,目标为空中运动目标,运动轨迹为远离,目标指示方位180°、距离5 km、速度250 m/s,目标作等高匀速飞行,海情为三级。信号处理机根据目指距离数据,移动捕获波门到相应位置,伺服系统进行方位调弦到180°,伺服系统根据目标类型,控制天线在俯仰角度上从0°向上开始捕获扫描。在扫描到俯仰角度为2.27°时,雷达信号处理机判断目标回波强度为9 430,超过捕获门限值5 000,天线仰角停止扫描,信号处理机将跟踪波门移到目标回波中心位置。信号处理机根据跟踪波门中心位置,在目标运动到10 km的时刻(此时雷达仰角高度为1.14°)选取目标回波中心位置前后各32个点的回波幅度xi进行采样,采样数据见表1和表2。

表1 目标回波中心位置前32点采样数据


中心门限U0为6 431.92,此时目标的回波中心强度为8 214,边缘强度为8 192和7 997,目标回波强度均值为8 163,判断目标回波幅度xD=8 163大于中心门限U0=6 431.92,而根据经验设计的固定门限值为8 500,如以此门限来进行判别,必将造成目标的漏测和跟踪丢失,不能对目标保持连续稳定的跟踪,采用门限实时自适应技术后,提高了对小目标的检测概率和连续稳定的跟踪能力。
3 结束语
与现有技术相比,在传统跟踪雷达的检测方法基础上引入中心门限实时自适应变化的技术,能够有效抑制中心门限固定情况下杂波背景复杂(杂波强度大,或者杂波起伏变化较大)造成的小目标检测高虚警、漏测以及丢失的问题,提高了复杂的海杂波背景下对掠海小目标的捕获能力和稳定跟踪能力。
典型环境下的仿真验证了该方法的有效性,该方法已应用在多型跟踪雷达装备中。
随着电子技术水平和计算处理能力的提高,越来越多的智能化手段应用到雷达系统的设计中[4],使得雷达具有高的目标和环境适应能力,它通过对目标和环境进行检测、分析、学习、推理和规划,根据天线指向、海情、目标类型、目标距离以及目标回波大小等,采用实时自适应技术调整脉冲波形、工作重频、波门宽度、门限等参数,减小了宽脉冲脉压带来的杂波、大目标副瓣对目标跟踪的影响,完成在复杂的杂波背景下捕获和稳定跟踪低空飞行小目标,并增强了抗杂波和抗电子干扰的能力,提高强杂波下全程目标检测能力和跟踪精度[5],进一步提升了雷达的跟踪性能。