基于逐级离散相关法的机器人动态目标跟踪定位算法
2021-04-07周恒,蔡云
周 恒,蔡 云
(安徽三联学院服务机器人应用技术协同创新中心,安徽 合肥,230601)
0 引言
随着人工智能控制技术的发展,机器的智能性越来越强,机器人系统逐步得到发展[1].采用遥控远程控制方式进行机器人的跟踪控制,提高机器人的智能控制能力.在进行自主遥控轮式机器人设计中,需要分析机器人的定位轨迹,从而指导自主遥控轮式机器人的优化控制,采用模糊跟踪控制和信息融合方法,实现自主遥控轮式机器人的智能控制,构建自主遥控轮式机器人智能定位模型,结合相关的机器人控制算法,进行自主遥控轮式机器人智能定位设计,提高自主遥控轮式机器人的智能定位和轨迹跟踪能力,通过轨迹跟踪优化,提高自主遥控轮式机器人的动态识别能力,相关的自主遥控轮式机器人跟踪定位方法研究受到人们的极大关注.在机器人目标跟踪定位算法研究方面,国外的研究起步较早,相应的研究成果也较多,典型的研究成果包括基于双目视觉技术的定位算法、基于粒子滤波技术的定位算法等.而国内这方面的研究起步较晚,但发展速度较快,针对机器人目标跟踪定位方面也提出了比较完善的理论.然而国内的研究工作暂时停留在理论层面,在应用过程中依旧会出现跟踪定位精度低的问题.以解决当前计算机目标定位方法中存在问题为目的,本文提出基于逐级离散相关法的机器人动态目标跟踪定位算法.以期实现机器人的动态参量融合和稳定跟踪控制.
1 自主遥控轮式机器人的被控对象及参数分析
1.1 自主遥控轮式机器人的被控对象模型
为了实现自主遥控轮式机器人的智能控制和动态目标跟踪,采用智能激光定位方法进行机器人的路径寻优,结合电势场特征分析方法[2]进行自主遥控轮式机器人的动态路径跟踪控制,建立轮式移动机器人的动态参数融合模型,对自主遥控轮式机器人进行动态目标跟踪定位控制,得到轨迹跟踪模型如图1所示.
建立自主遥控轮式机器人的控制力学参数分析模型,采用高精度地图的SLAM定位方法进行自主遥控轮式机器人的互动检测,进行自主遥控轮式机器人的信息融合识别,采用传感器信息采集的方法,构建自主遥控轮式机器人的运动参数分析模型,提取自主遥控轮式机器人的运动参数,得到自主遥控轮式机器人的传感参数量化特征集合为Ss,其中有n个自变量样本,采用模糊状态特征识别方法进行自主遥控轮式机器人的运动学参数分析,运动参数分布矩阵为:

采用模型信息融合方法,建立自主遥控轮式机器人的动态跟随模型,结合动态空间分块区域匹配的方法,进行自主遥控轮式机器人的动态目标跟踪定位控制,得到动态目标跟踪定位控制自适应控制矩阵Q,结合Lyapunov正定性原理,得到自主遥控轮式机器人的稳态性特征量,存在Q的逆矩阵Q-1,并Q-1同时也为自主遥控轮式稳定性跟踪的正定矩阵.定义自主遥控轮式的惯性力矢量和转矩矢量:

通过对自主遥控轮式的运动状态量融合,进行自主遥控轮式的自主寻优控制,提高自主遥控轮式的主动定位能力.
1.2 运动参数特征分析
建立自主遥控轮式机器人的空间姿态信息采样模型,结合信息素导引控制方法进行自主遥控轮式机器人的输出惯性参量融合,提取自主遥控轮式机器人的关联规则特征量,自主遥控轮式机器人的空间融合特征量满足:

使用标准卡尔曼滤波器进行自主遥控轮式机器人的参数融合,提取自主遥控轮式机器人的位姿参数特征量,采用传感惯性跟踪识别方法,进行自主遥控轮式机器人的位姿定位,获得的实际轨迹位姿,通过Q"计算逆矩阵,得到自主遥控轮式机器人移动轨迹分布特征量描述为:

其中,x(k)∈Rn×1为自主遥控轮式机器人移动特征状态,A(k)∈Rn×n为小扰动作用下自主遥控轮式机器人的扰动特征量[3],根据上述分析,构建自主遥控轮式机器人的被控对象模型,提取自主遥控轮式机器人的运动参数.设F:R→P(R)为自主遥控轮式机器人的轮式移动惯性轨迹,如果∃x0∈R且∃x0∈R1,则自主遥控轮式机器人的目标位姿参数分布满足∃x0∈R2时,有:

则F在B(x,u)处自主遥控轮式机器人的力学分布满足稳定性收敛条件,对于机器人的移动轨迹点t=0,1,…,k,采用测度分析方法,得到自主遥控轮式机器人的优化定位参数为Zk={z0,z1,…,zk},当b>a时,自主遥控轮式机器人的惯性参量为:

而∃x,p>0,u>0 条件成立时,自主遥控轮式机器人运动动能满足:

采用SLAM算法进行自主遥控轮式机器人的地图定位[4-5],自主遥控轮式机器人定位的稳定性跟踪条件满足,则:

根据上述分析,建立自主遥控轮式机器人的参数融合模型,根据参数定位和融合分析结果,提高自主遥控轮式机器人的跟踪定位能力.
2 自主遥控轮式机器人的动态目标跟踪
2.1 机器人激光定位解扰控制
提取自主遥控轮式机器人的关联规则特征量,结合模糊PID控制方法进行自主遥控轮式机器人的输出稳定性控制,目标跟踪定位的关联矢量:

结合信息素导引控制方法进行自主遥控轮式机器人的输出惯性参量融合,自主遥控轮式机器人控制系统为一个反演闭环控制系统[6-7],得到反演控制约束特征量满足如下条件:
结合模糊PID控制方法进行自主遥控轮式机器人的输出稳定性控制,提取机器人的动态参数[7].对于机器人处于欠驱动模式下满足∀i∈Ss,得到自主遥控轮式机器人的输出转矩矢量为[9]:

根据拉格朗日建模法,进行自主遥控轮式机器人的寻优控制,得到特征量满足,采用扰动抑制方法,输出的稳定性参数满足.获得机器人轮式跟踪的比例-积分项[10-11],采用惯性寻优,实现自主遥控轮式机器人的输出稳定性控制,得到解扰控制输出为:

其中,Levf表示机器人的逐级离散关联特征量,提取机器人的动态参数,采用参数融合方法进行机器人的动态参数寻优,提高机器人的自主定位能力[12-13].
2.2 机器人的目标跟踪定位
本文提出基于逐级离散相关法的机器人动态目标跟踪定位算法,引入逐级离散相关法进行惯性寻优,得到稳定性适应特征解在坐标系中满足Ox1y1z1,构造机器人动态目标轨迹跟踪模型为:

假设自主遥控轮式机器人模型由2个相同的约束特征量构成[13],假设Ss为扰动矩阵,采用自适应鲁棒控制方法进行自主遥控设计,得到融合跟踪参数集为:

其中,P、R为自主遥控轮式机器人运动的姿态参量矩阵,在限定初始条件下,自主遥控轮式机器人的动态目标跟踪定位优化参数为[14]:

其中,w(k)∈Rn表示自主遥控轮式机器人姿态陀螺测量值,综上分析,采用参数融合方法进行机器人的动态参数寻优,实现自主遥控轮式机器人的动态参量融合和稳定跟踪控制,采用逐级离散相关法[15]实现机器人动态目标跟踪定位.
3 仿真实验
实验中使用的自主遥控轮式机器人如图2所示.在执行跟踪定位算法之前设置实验对象机器人的基本结构参数,具体的设置情况如图3所示.
定位算法仿真程序为Matlab,自主遥控轮式机器人的运行场地区域大小为100 m×100 m,模糊寻优的迭代步数为120,干扰强度为15 dB,信息素导引的空间分布系数为0.48,根据上述参数设定,进行仿真测试分析.

图2 自主遥控轮式机器人实例Fig. 2 Example of autonomous remote control wheeled robot

图3 实验对象结构参数设置Fig. 3 Experimental object structure parameter setting
采用模糊状态特征识别方法进行自主遥控轮式机器人的运动学参数分析,建立自主遥控轮式机器人的空间姿态信息采样模型,实现自主遥控轮式机器人的动态定位,得到自主遥控轮式机器人的目标跟踪定位结果如图4所示.
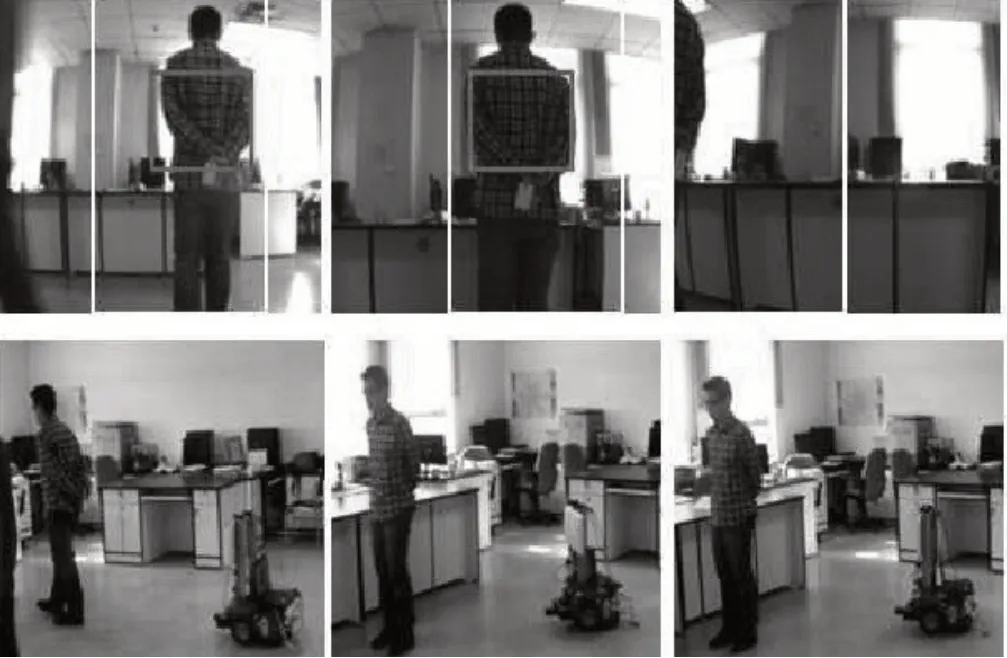
图4 机器人的目标跟踪定位实验结果图Fig. 4 Experimental results diagram of robot target tracking and positioning
结合信息素导引控制方法进行自主遥控轮式机器人的输出惯性参量融合,提取自主遥控轮式机器人的关联规则特征量,实现自主遥控轮式机器人的动态目标跟踪定位,得到其定位路径过程结果如图5所示.

图5 机器人动态目标跟踪定位路径过程Fig. 5 Robot dynamic target tracking and positioning path process
分析图4得知,采用本文方法能有效实现机器人动态目标跟踪定位,测试定位精度.为进一步分析本文方法的有效性及可行性,本实验将以跟踪定位错误率及时间开销作为本次实验指标,进行仿真.
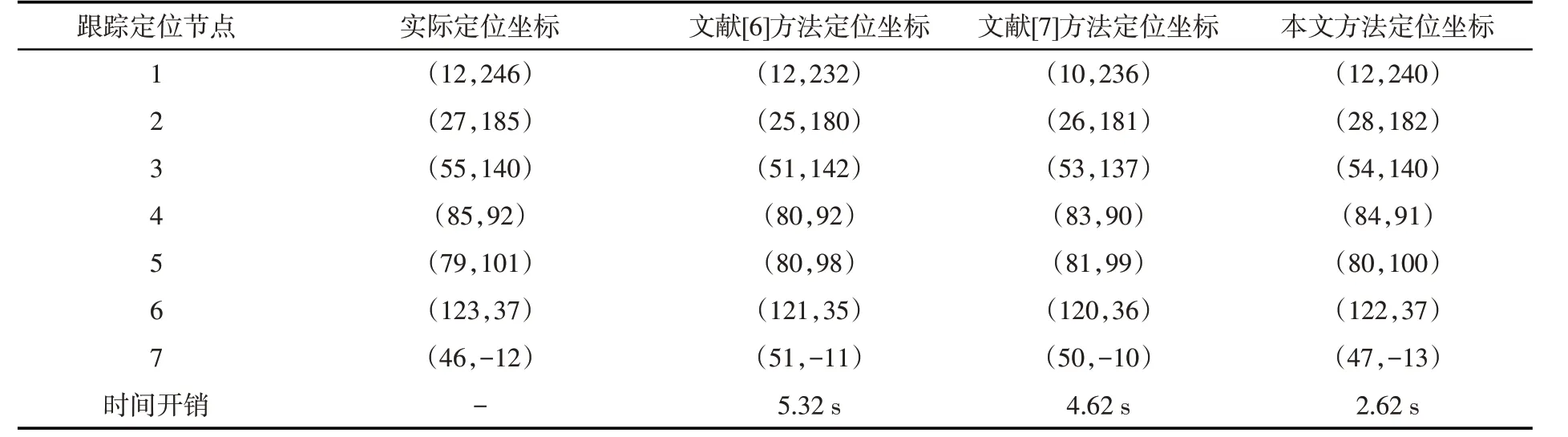
表1 不同方法的跟踪定位错误率及时间开销Tab. 1 Tracking and location error rate and time overhead of different methods
通过对表1中数据的统计计算,发现本文方法的定位误差为2 cm,而文献[6]方法和文献[7]方法得出的定位结果的平均误差分别为5.33 cm和4.67 cm.另外从时间开销统计数据上可以看出,与文献[6]方法和文献[7]方法相比,本文的时间开销分别节省了2.7 s和2.0 s.由此可知,相比于文献[6]和文献[7]中提出的方法,本文动态目标跟踪定位算法的定位错误率更低,时间开销更小,这是由于本文方法在进行机器人动态目标跟踪定位时首先进行了机器人激光定位解扰控制,并考虑扰动矩阵采用自适应鲁棒控制方法进行自主遥控设计,融合跟踪参数.在限定初始条件下优化融合参数,以降低自主遥控轮式机器人的动态跟踪定位错误率,并减少跟踪定位所需时间开销,以此提升工作效率.
4 结语
本文提出基于逐级离散相关法的机器人动态目标跟踪定位算法.采用传感器信息采集的方法,构建自主遥控轮式机器人的运动参数分析模型,提取自主遥控轮式机器人的运动参数,采用测度分析方法,得到自主遥控轮式机器人的优化定位参数,采用参数融合方法进行机器人的动态参数寻优,实现自主遥控轮式机器人的动态参量融合和稳定跟踪控制,采用逐级离散相关法实现机器人动态目标跟踪定位.分析得知,本文方法进行机器人动态目标跟踪定位的精度较高,且所需时间开销较小.
