基于子空间投影的复杂水下环境运动小目标检测前跟踪方法
2021-04-06陈华杰白浩然
陈华杰 白浩然
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室 杭州 310018)
1 引言
随着声呐成像技术的日益成熟,利用图像技术实现水下蛙人、深水潜艇等水下运动小目标的检测与跟踪对水域监测等具有重要意义。由于声呐成像技术的原理以及水下小目标原始像素点数量少等因素,图像中呈现的运动目标尺寸小、信号强度弱;同时水下噪声和海底混响等因素导致图像中存在大量动、静杂波混合的复杂类型杂波,运动目标的信杂比低[1];更甚者目标在数据中存在掉帧现象,难以直接追踪目标。运动小目标的原始像素点数量少,难以利用目标面特征,因此利用运动的规律性是实现目标追踪的有效手段。检测前跟踪(Tracking-Before- Detection, TBD)技术是目前常用的小目标跟踪方法,通过累积目标连续运动的信号确定目标航迹[2]。常用TBD技术包括批处理实现的动态规划(Dynamic Programming, DP)[3,4]和霍夫变换(Hough Transform, HT)[5,6],递归实现的粒子滤波(Particle Filter, PF)[7,8]。
PF技术通过寻找状态空间传播的随机样本近似获取概率密度函数,需要大量样本以保证检测和跟踪的性能,巨大的计算量以及大量的有效样本需求限制了PF技术在声呐图像中的应用[9]。HT技术利用图像在空间域到参数空间的转换关系,将检测问题转化为统计问题,图像中任一边缘点都需要一条对应的曲线表示[10],对计算机的内存和算力需求较大。DP技术采用多阶段决策,计算各阶段最优决策并根据各阶段间的相关性获得整体最优决策[11],在复杂环境中应用DP技术存在下列问题:(1)目标在数据中存在掉帧现象,DP算法对此类数据的处理效果不佳;(2)数据中存在密集分布的动杂波且运动目标的信杂比极低[12],DP算法会产生错误决策;(3)巨大的计算量也是DP算法的弊端,大量动杂波会增加状态变量数目,进一步提升决策所需计算量,同时批处理方式算法的实时性有待商榷[13];(4)对于声呐、雷达等高精度传感器,运动目标在数据中可能成为扩展目标[14],DP算法对此类目标的处理效果不佳[15]。
针对上述问题,本文提出基于子空间投影的TBD算法。首先根据运动目标的机动性,将目标运动图像的3维时空序列切分为若干个时间片段[16],保证在单个时间片段内目标的运动航迹不折叠;然后将3维短时运动航迹片段投影到2维子空间平面,根据目标运动航迹与一般杂波航迹的空间形态特征差异,筛选获得局部候选航迹区域;再对候选区域进行航迹回溯,将目标航迹重映射到3维时空,根据目标运动的连续性、方向一致性等规律对目标运动航迹筛选并估计运动目标中心位置。
将航迹片段从3维时空投影到2维子空间平面再进行处理的优势:待处理的数据得以降维,处理速度大幅度提高;不足之处:投影过程仅保留了空间形态特征,丢失了数据的时序信息。考虑到在单个时间片段内目标运动方向改变幅度不大,利用空间形态特征即可有效区分运动目标与大部分动杂波。在2维子空间平面,依据总体形态特征检测目标航迹,可能存在的部分漏检航迹点对检测的总体影响较小;检测算法对目标尺寸不敏感,对点目标和扩展目标均适用;各航迹片段单独处理,避免了新目标起始航迹被误判为杂波的问题[17]。
2 基于子空间投影TBD的运动目标快速检测
2.1 总体方案设计
面向声呐水下运动目标检测场合,本文构建了运动目标快速检测系统。在图1所示的系统方案中,主要的处理环节包括:对输入的运动目标图像序列进行前景检测,初步获取包含运动点迹和杂波的运动点集合;截取目标/杂波点序列片段,进行基于子空间投影的TBD处理,剔除部分杂波干扰点,获取运动目标的短时航迹点集;将不同时刻的短时航迹点集合归并为长时航迹点集合,利用航迹的数据特征进行聚类[18],将同一目标不同时刻的短时航迹连接成完整的长时航迹,并根据目标运动的时空特性进一步筛选杂波干扰点,剔除长时航迹点集合中的无效运动点迹。
2.2 前景检测
前景检测用于输入图像数据序列的运动点初检测。综合考虑检测速度与检测精度,采用帧差法进行前景检测。计算当前帧与前一帧对应像素点的差值,若差的绝对值超过设定阈值则标记该像素点为前景,某帧数据及其前景检测结果如图2所示。
2.3 短时航迹检测:基于子空间投影的快速TBD算法
运动检测是对探测数据按时间序列处理,滤除杂波干扰,获取目标运动航迹的过程。TBD的常规做法是截取序列片段进行积累,序列片段的帧数选择与累积时间、信号积累效果呈正相关,但若仅追求信号积累效果则会相应地增加计算负担。
子空间投影TBD流程如图3所示:首先将截取的序列片段投影到子空间;在2维空间的短时投影图上,利用目标航迹与一般杂波的形态差异进行滤波,获取运动目标可能存在的区域;再以局部区域为模板回溯3维序列,并根据目标运动的连续性与方向一致性等特性滤除杂波干扰,获取目标短时候选航迹。

图1 基于子空间投影的快速TBD检测系统方案
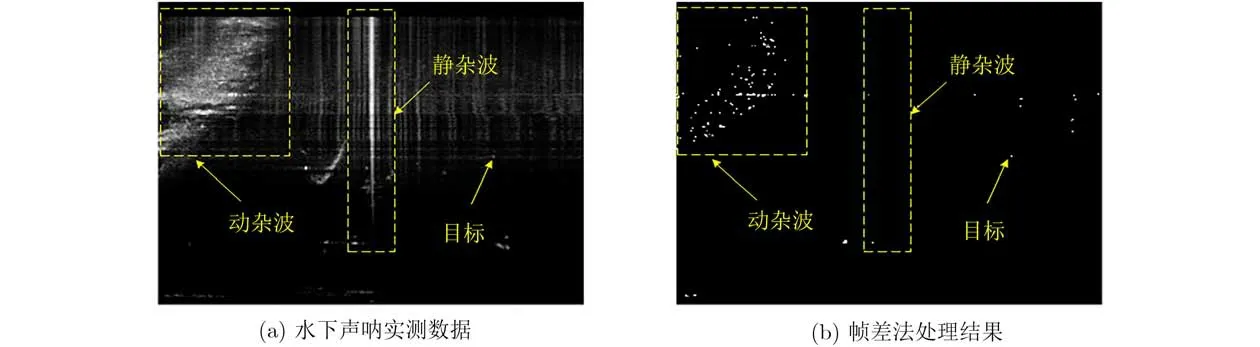
图2 前景检测数据及其结果
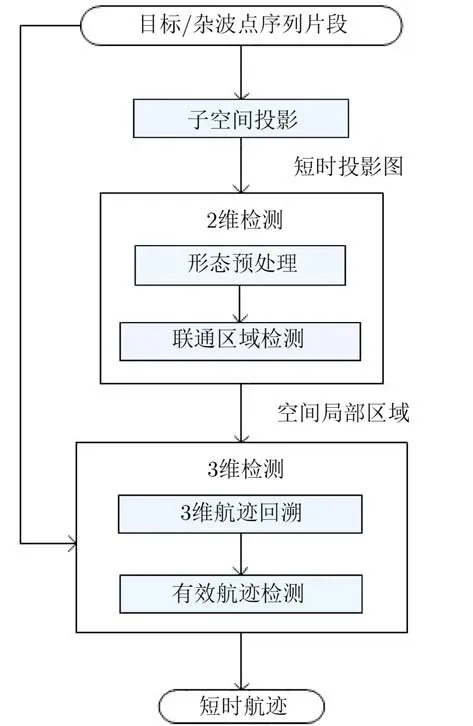
图3 子空间投影TBD流程图
2.3.1 子空间投影
待处理的数据序列片段表示为 f(x,y,t), t=t1,t2,···,tk,片段中存在k 帧数据,其中( x,y)是2维空间平面坐标, t是采样时刻。f (xn,yn,tn)对应3维时空的一个点,其坐标为 (xn,yn,tn),该点的取值范 围 为 {0,1} 。若 位 置( xn,yn,tn)上 存 在 点 迹,则f(xn,yn,tn)=1 ;若该位置上没有点迹,则f(xn,yn,tn)=0。
将该序列片段向2维子空间平面( x,y)投影,获得短时投影图p(x,y)
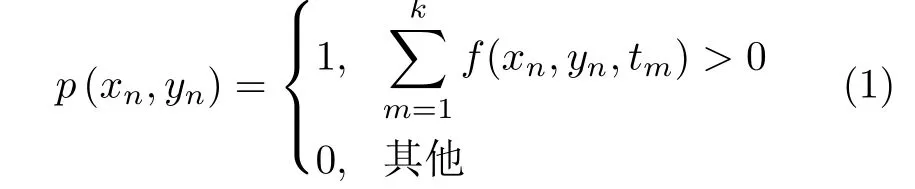
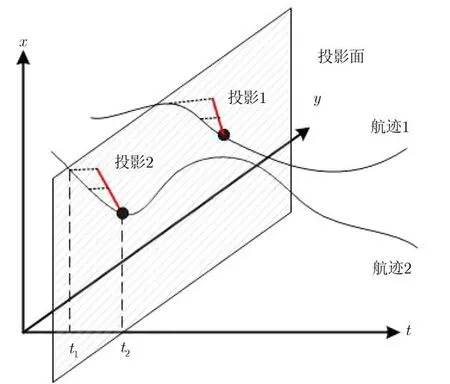
图4 子空间投影示意图
图4给出了运动目标航迹的子空间投影示意图,其中的目标运动航迹由3维时空曲线映射到投影面上的2维空间曲线。降维后目标航迹丢失了3维时序信息,但基本保留了完整的空间运行形态信息。
一般情况下目标在序列片段内做单向运动,2维投影图中航迹呈长条状,宽度由目标的尺寸决定,长度由目标运动速度决定,形态由目标实际航迹决定。为了尽量保留目标航迹的空间形态特征,需要根据目标的运动速度选择合理的数据序列长度。序列片段长度越大,目标运动航迹在投影结果中存在折叠的可能性越大;序列长度不足会削弱累积效应,降低杂波滤除的效果。
2.3.2 2维空间形态检测
2维检测是在投影图上根据目标航迹投影与杂波投影的形态差异,尽量滤除干扰杂波,确定目标航迹所处的局部区域。如前所述,一般情况下目标航迹投影呈现长条状,大概率与杂波干扰点投影呈现明显差异:散乱杂波一般为散乱分布的点状;一定范围内聚集的杂波点的投影聚集形成的区域,与规律的条状也有明显的区分。根据形态学闭操作对投影图的预处理结果划分联通区域,由联通区域间形态特征的差异确定候选投影区域。
(1) 形态学预处理。受噪声、杂波等因素的影响,运动航迹可能出现间断,投影图上表现为航迹中存在狭窄的间断。采用形态学闭运算可消除航迹中的轻微间断,对邻近干扰信息也有一定的滤波作用。图5(a)为某一序列片段的子空间投影图,图5(b)为投影图形态学预处理后的结果。

利用上述约束对图5(b)中的联通区域检测,候选联通区域在图6(a)用红色标注。
2.3.3 3维时空航迹回溯及检测
在候选联通区域范围内,对目标每个时刻的空间位置估计;回溯当前序列片段得到的目标3维时空航迹,依次重构运动点迹集合的时序关系;结合时序关系,对航迹的内在规律进行更细致的刻画,进一步滤除杂波。
(1) 航迹回溯。设2维检测后存在 m个联通区域:{ sa|a=1,2,···,m} , sa是其中的一个联通区域,该联通区域由 q个空间位置点构成:sa={(xb,yb)|b=1,2,···,q}, ( xb,yb)是 其中的一个位置点。f(x,y,t)是该序列片段内的某一数据帧,获取该数据帧中运动目标在联通区域sa内的运动点集合

计算点迹的位置均值,作为运动目标在该数据帧上的位置估计

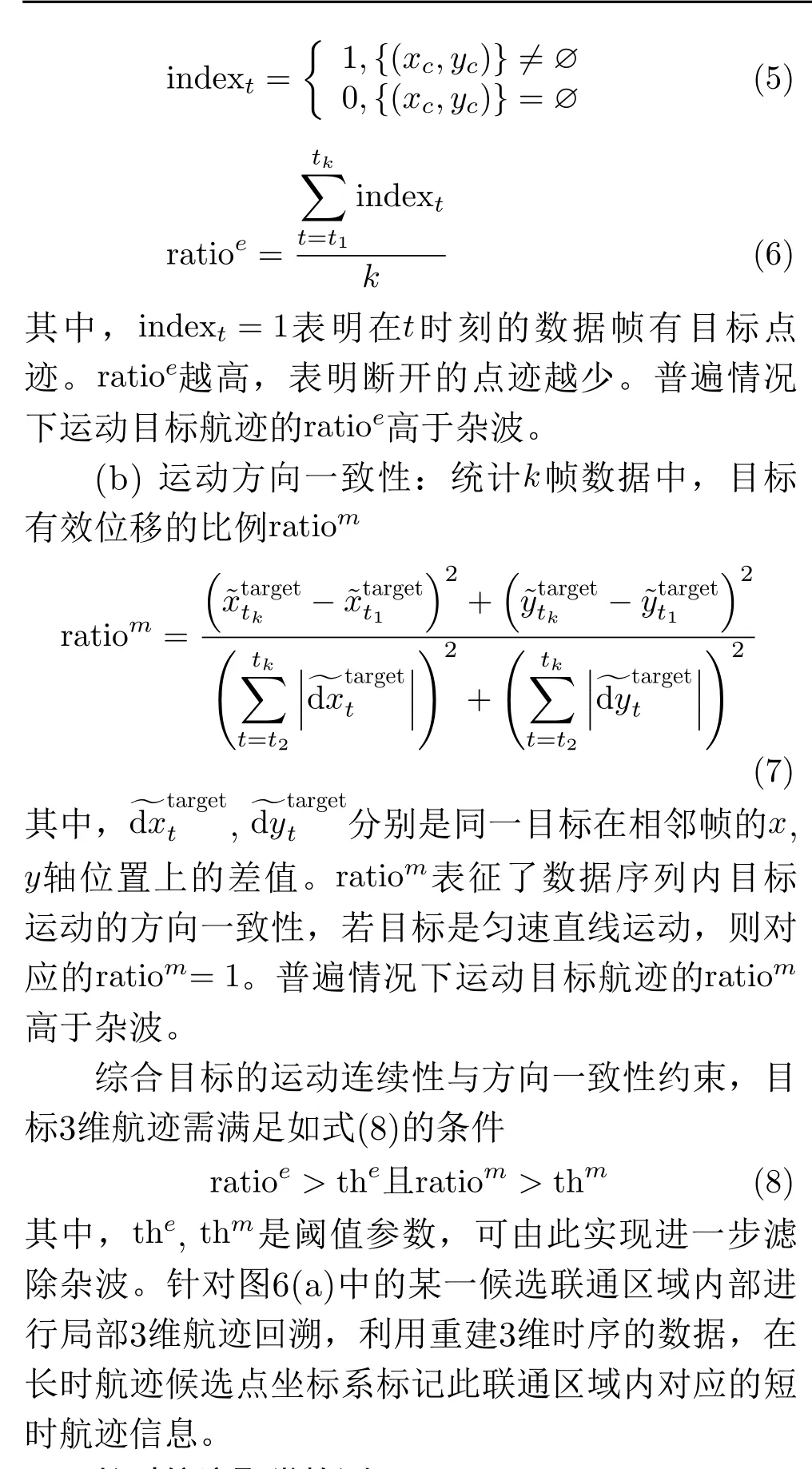
运动点集合{ (xc,yc)}包含目标航迹的位置坐标及可能存在的杂波点坐标,因此运动目标的位置估计可能会存在偏差。目标尺寸越大、杂波密度越低,运动点迹的有效占比越大,位置估计越准确。目标的尺寸对目标的位置估计的影响可忽略不计,因此该算法对点目标、扩展目标均适用。
(2) 3维短时航迹检测。利用投影的2维空间形态,结合重构的3维时序关系,可以在3维时空提取到更细致的运行特性信息,进一步滤除杂波干扰,其中包括

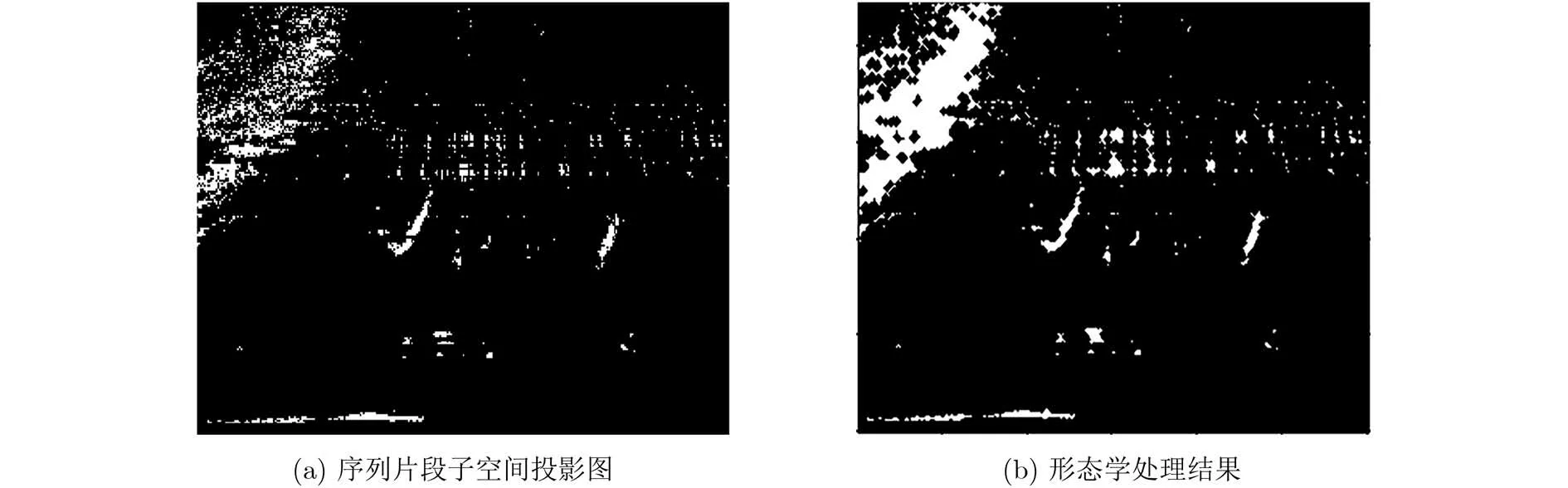
图5 子空间投影及形态学处理
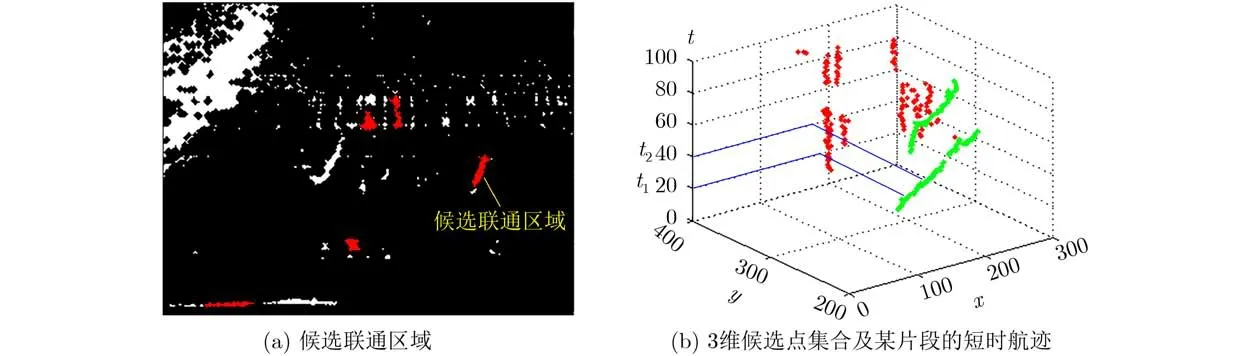
图6 联通区域检测及航迹3维坐标显示
2.4 长时航迹聚类检测
将各数据序列片段处理的短时航迹归并为短时航迹集合,采用HAC对短时航迹集合进行聚类,再结合目标航迹特性进行检测,判断并删除干扰航迹,生成目标的长时运动航迹。
2.4.1 航迹聚类
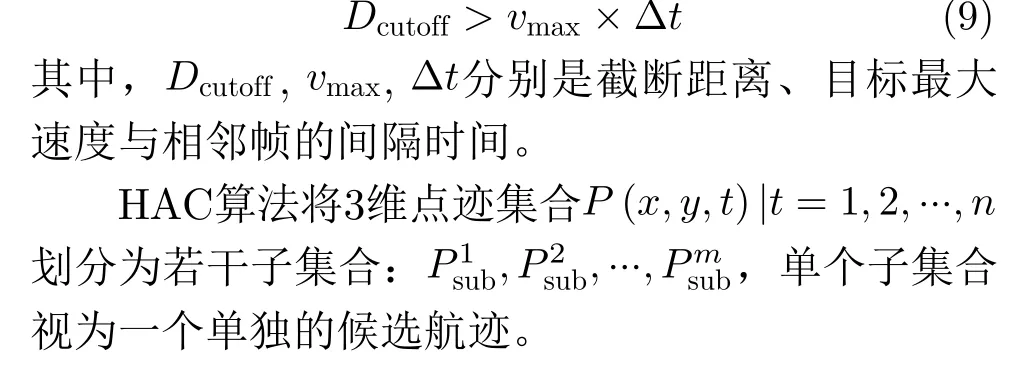
基于HAC的航迹聚类基本思路:将每个3维运动点作为初始集合开始迭代,每次迭代会将最相似的2个运动点集合合并,直到任意2个集合之间的距离超过截断距离。聚类过程中集合间的距离测度采用单链形式,截断距离取决于运动目标的速度与相邻帧的间隔时间:
2.4.2 目标航迹检测
对于HAC生成的各候选航迹,需要根据运动目标与杂波扰动的特征差异进一步筛选。与实际目标运行相比,杂波扰动在时间维度持续时间较短,在空间范围内移动距离较短。可根据下列条件,从候选航迹中检测出目标的实际航迹。
(1) 航迹的时间长度。重构时序后的3维航迹点迹集合,时间维度与图像输入序列的图像帧数一一对应,考虑将时间维度作为约束条件,保证航迹连续存在时长,可以有效解决2维投影图中的航迹叠加问题,也可以解决部分航迹交叉问题。
采用上述条件对上述图6(b)进行检测,得到目标的长时运动航迹(图6中浅色标出),经对比与实际航迹符合。
2.4.3 过时点删除
随着时间的推移,每次产生的新增候选点都被纳入长时航迹候选点集合,新增候选点中存在与原有的候选点有着时空关联的候选点,此类候选点可连接组成连续航迹。同时时间维度约束会导致部分原有候选点不可能与后续任何候选点产生关联,称为过时点。及时删除候选点集合中的过时点,有助于控制候选点集合的规模,提高算法的效率。
3 实验验证及分析
实验使用计算机的处理器为Intel Core i5-9300H,主频2.4 GHz,内存8 GB。实验数据为中国船舶重工集团公司第七二六研究所提供的某型声呐在不同时间段的水下实测数据,对数据进行人工筛选,选定存在目标的两段数据。数据中的运动目标为深度18.5 m的重球,数据序列1中存在2个目标,数据序列2中存在1个目标。对原始数据进行分贝等级转化、数值归一化、压缩等处理,得到尺寸为400×300的图像声呐数据,各目标在数据中的实际运动轨迹如图7(a)、图7(b)所示。
采用基于DP-TBD的快速检测系统对两个数据序列进行处理,算法检测的目标及其航迹如图8(a)、图8(b)所示。
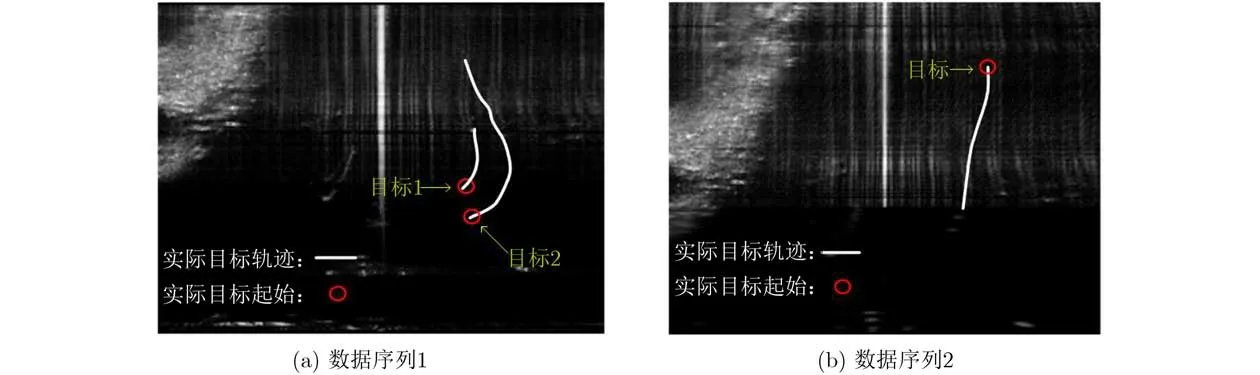
图7 目标原始轨迹
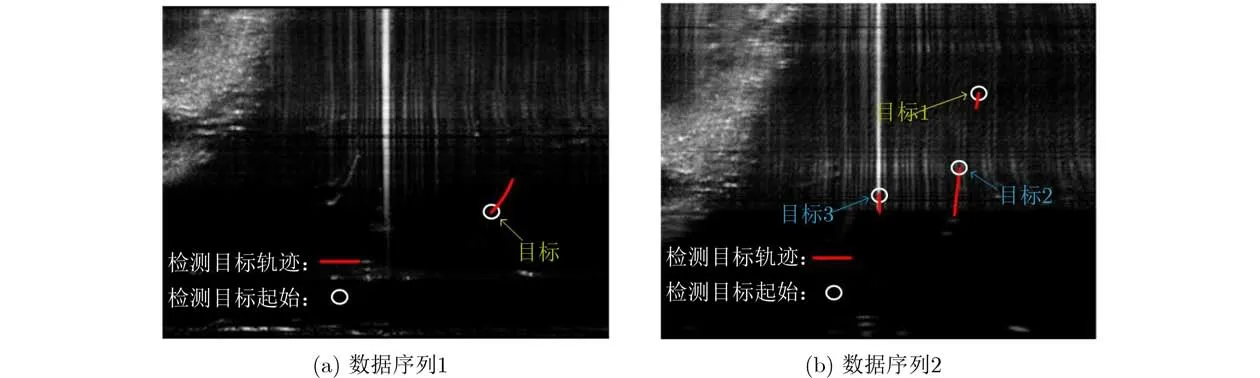
图8 基于DP-TBD的快速检测系统对数据序列的检测结果
基于DP-TBD的快速检测系统对2个数据序列中目标的检测结果如表1所示。
对于数据序列1,DP-TBD算法完全没有跟踪到目标1,目标2的起始位置偏后且跟踪一段距离后目标丢失。对于数据序列2,算法跟踪目标的起始位置偏后,目标丢失后重新跟踪到目标,检测结果中存在一个虚警目标。
用本文构建的基于子空间投影TBD的快速检测系统对两个数据序列进行处理,检测系统的具体参数选择如下:以连续的20帧数据长度作为序列片段截取长度;直径5像素长度的圆模板进行形态学处理;5像素长度至40像素长度作为联通区域尺寸范围;0.5作为运动连续性阈值;0.3作为运动方向一致性阈值;连续的6帧数据长度作为聚类的时间阈值;10像素长度作为目标运动的长度阈值;20像素长度作为目标的实际位移阈值。算法检测的目标及其航迹如图9(a)、图9(b)所示。
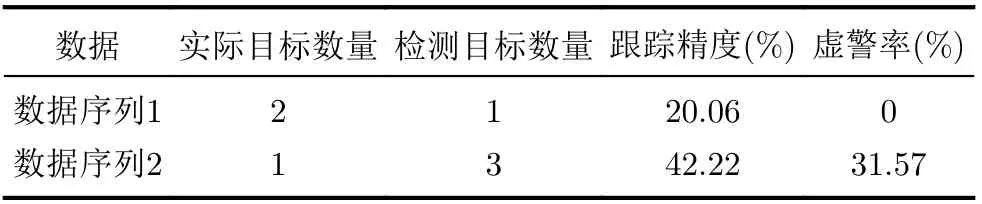
表1 基于DP-TBD的检测结果
基于子空间投影TBD算法对两个数据序列中目标的检测结果如表2所示。
对于数据序列1,本文算法跟踪了目标1的完整运动轨迹,目标2的起始位置和实际轨迹相同,检测结果中目标航迹中断了两次,但可以及时重新跟踪目标。对于数据序列2,目标航迹中断1次并被重新跟踪到目标。
上述实验结果表明,本文算法相比于经典的DP-TBD算法,无论对于单目标还是多目标,基本解决了目标航迹起始缓慢的问题。同时对于复杂环境下的运动目标,在目标跟踪精度上也有了极大提升,并改善了虚警问题。但对于目标航迹中断后的关联问题,没有很好的解决方案。
统计基于两种算法构建的检测系统处理实测声呐图像的总用时,经过多次实验利用总用时的平均值计算单帧数据处理的平均用时,如表3所示。
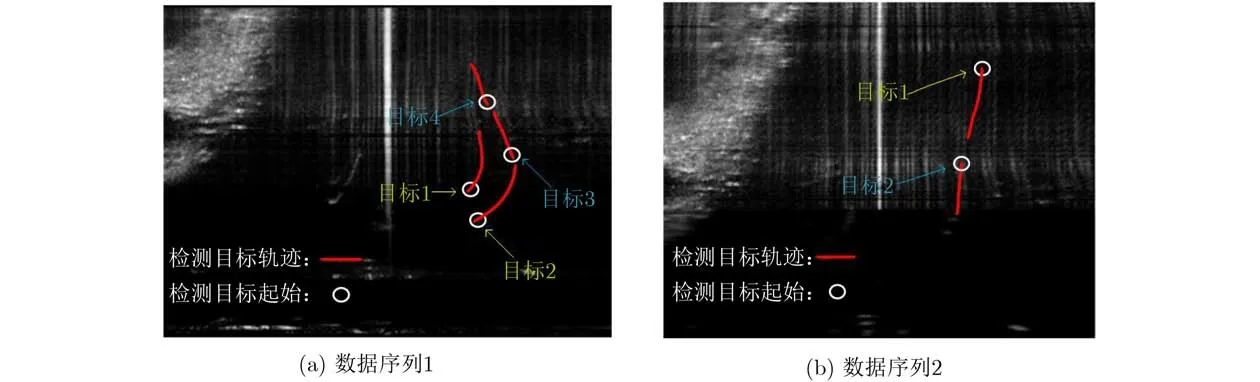
图9 基于子空间投影TBD的快速检测系统对数据序列的检测结果
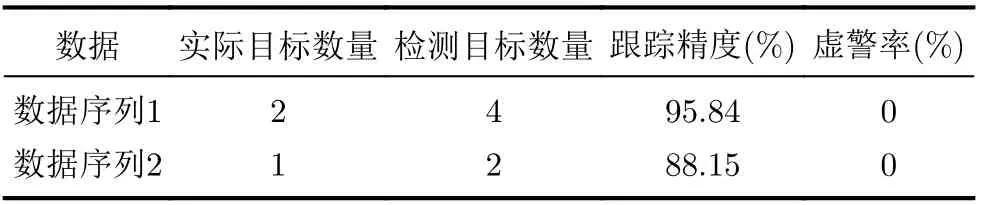
表2 基于子空间投影TBD的检测结果
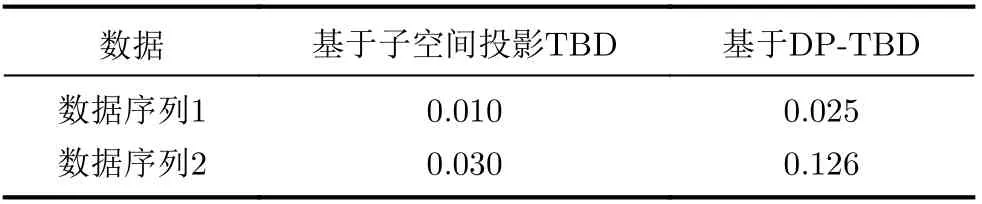
表3 处理单帧数据的平均用时(帧/s)
由于数据序列2中干扰信息数量大于数据序列1,表3中两种算法对于数据序列2处理的帧平均用时均大于数据序列1的帧平均用时。经典DP-TBD算法相比本文算法对实验数据的帧处理平均用时差距较大,主要原因在于DP算法需要对每帧数据处理,分阶段得到候选位置信息并做出决策,干扰信息数量越多其决策时间越长,且会在多次的决策阶段持续产生影响。本文算法通过对数据序列片段叠加,每个数据片段进行一次轨迹检测,大幅降低了算法用时,提升算法实时性的同时降低了航迹中断后重新跟踪目标的难度。
4 结论
本文针对复杂水下环境的弱小运动目标跟踪,提出了基于子空间投影的TBD算法。该算法利用目标运动航迹从3维时空投影到2维平面,最后回溯到3维时空的整体过程,依据目标运动的一般特性,滤除大部分干扰信息,采用层次聚类获取完整航迹。本方法充分利用了目标的数据帧内位置信息、目标运动的帧间连续性信息、目标运动的有效数据帧占比和目标连续运动的有效位移。比之现有方法,提高了目标航迹起始能力,实现了更高的实时跟踪精度,减少了算法所需计算量。同时该算法对运动目标的类型要求宽泛,可同时对尺寸、机动性差异较大的多目标实现高精度的实时检测。
