黄河小浪底深水涵洞疏堵机器人空间识别试验
2021-03-25彭建平彭赛锋程阳锐
彭建平,彭赛锋,程阳锐
(长沙矿冶研究院有限责任公司,深海矿产资源开发利用技术国家重点实验室,湖南 长沙 410012)
0 引言
深孔泄水建筑物作为大坝的重要组成部分,对保障高坝大库安全至关重要。长期运行后,受入库泥沙含量、流速、水深、运行方式等诸多因素影响,泄水孔洞内可能会出现泥沙等淤积,导致深孔堵塞,造成深孔闸门开启困难,严重影响整个工程安全运行。当淤积严重,深孔闸门无法启动时,传统的作法是人工潜入水下进行相应处理,达到深孔闸门可以开启的目的。传统人工水下作业受到下潜时间和下潜深度的限制,作业范围有限、作业条件差、能见度低,且水下环境复杂,施工风险大,效率低,工程费用高。
采用水下机器人替代传统人工进行深水孔洞检查、清理、修复等相关作业,既能保证人员安全,又能提高工作效率。深水疏堵机器人是一种适应深水受限空间(含各种孔洞等)并在受限空间执行疏堵作业的机器人,它自身携带各种作业工具(如绞吸头、抓斗等)清理孔洞内的淤积物,并将淤积物移至洞外。在深水受限空间内,为顺利完成任务,疏堵机器人首先要具备环境感知能力,能够识别空间并规划作业路径,如同人类眼睛判别自身所处的具体位置,并指引机器人前往目标区域开展任务。
1 研究现状
水下空间识别就是机器人利用自身携带的装备和探测元件,主动探测机器人周围环境,对周围的环境形成准确、清晰、完整地认识,为机器人的路径规划以及作业提供指导与支持。一般多采用水下摄像系统、水下图像声纳系统等装置来完成。
1.1 水下摄像系统
水下摄像系统主要由水下摄相机和水下照明灯两部分组成,能够现场实时摄影,并且可以通过光缆将影像资料实时传输给水面系统。通过多台摄像机可以组成立体摄像系统,生成立体地形图或立体物体图像,确定地形或物体三维尺寸。
由于光波为高频波,灯光在水中衰减很快,传播距离很短,所以水下摄影系统成像范围十分有限,距离一般不超过15 m,镜头画面只能覆盖15 m2左右。水下摄像受到水体混浊度的影响,水质较好、能见度较高时可以得到很好应用;但在水域混浊或水体能见度较低时几乎无法正常拍照录相。
水下光学摄像系统应用非常广泛。深海高清摄像系统可用于海底多金属结核的矿产普查分析,完成深海地质调查任务。 在深水疏浚施工过程中,利用水下摄像技术可清晰观测水底表面情况,为施工作业提供有利支撑。“鲲龙500”多金属结核采矿车利用多台水下摄像机监测采矿车各关键部位及周围环境,为海试的成功提供了切实保障。
1.2 图像声呐
图像声呐用于探测和定位水下目标,它利用换能器主动发射出声信号,声信号经过目标反射,反射的回波信号成为目标信息传递的载体,携带着探测空间范围内各种物体的信息,这些携带有各种信息的回波信号由水听器接收,然后通过数据处理接收到的回波信号,可以得到声呐图像数据,对水下目标进行成像,以图像的形式实时直观地反映目标信息。
水中水对光电信号的吸收比率远高于空气中的吸收比率。相对而言,水声信号具有得天独厚的优势,水下声信号比陆地快4倍多的速度进行传输。同时图像声呐能够克服复杂的水文环境,即使在浑浊水域以及较差的水文环境中,仍能有效传播,具有较远的作用距离,成像范围可以达到十几米到几百米的区域,所以广泛应用于ROV、AUV和UUV等水下装备,用于水下地形以及障碍物的感知。
图像声呐相当于水下机器人或作业系统的视觉系统,主要用于检测水下目标的距离、方位或表面状态等信息。通过这些信息,不仅可以避障,还可以对设定的目标进行跟踪和识别。
2 深水疏堵机器人结构与控制策略
2.1 机器人结构
作为深水孔洞疏堵作业的自动化装备,深水疏堵机器人携带各种作业工具,能够识别水下作业目标,按照规划作业路径,前往作业区域进行作业。深水疏堵机器人主要由履带行走机构,车体、清淤作业机构,淤泥输送系统,液压动力系统,姿态调节装置,水下控制仓,水下空间识别元件和定位导航元件等部分组成。
水下空间识别元件主要由1组固定的水下摄像机及照明灯、1组水下云台摄像机及照明灯和1个图像声呐组成,见图1。水下摄像机及照明灯固定在机器人前部横梁上,用于对机器人前方进行摄像。水下云台摄像机及照明灯固定在机器人车架前部,云台摄像机可以多个自由度旋转,根据需要灵活调整摄像视角。图像声纳安装在机器人前部横梁中间,呈水平布置,用于搜索感知机器人前方目标。机器人前部横梁还竖直安装有1个高度计,用于测量机器人距离水库底面的高度。
惯性组合导航系统包括惯性导航系统、多普勒测速仪,它安装在机器人前部横梁左侧。其核心部分是惯性导航系统,它通过三轴加速度计测量3个方向的线加速度,通过三轴陀螺仪测量3个方向的角速度,实时计算机器人的位置、方位及姿态信息。随着时间的积累,惯性导航系统会出现发散现象,必须采用辅助手段修正惯性导航系统的累积误差。多普勒测速仪可以测量机器人的对地速度,通过对地速度以及运行时间可以计算出机器人的运行距离。通过运行距离、机器人方位以及初始位置信息,可以计算出机器人的实时位置信息,将此位置信息输入惯性导航系统,进行数据融合处理,得出精度比较高的位置、航向及姿态信息。
2.2 控制策略
根据操作者参与程度,可分为手动控制模式和自动控制模式。在水下扰动较小,能见度较高的情况下,疏堵机器人的摄像机可以获取机器人自身及周围的图像视频资料,图像声呐对机器人前方目标进行探测而生成图像。
手动控制模式是操作人员在摄像机和图像声呐获取的图像信息指引下,人工对机器人状态进行实时监测,利用中央控制台进行操作,给机器人发出一系列指令。这种方式能够根据图像视频资料进行及时反馈,不断调整指令参数,保证深水孔

图1 环境感知与导航组件图
洞作业的安全性。即使水下浑浊,摄像机无法获取图像资料,也能在图像声呐的指引下进行。
自动控制模式就是在视频资料的指引下,操作人员事先确定和设置好机器人的相关参数,包括航向角、行走速度等,开启自动模式,在图像声呐、惯性组合导航等声学设备的配合下,机器人由控制系统指挥自动运行,完成相应任务。在这种模式下,操作者主要是进行参数设置、机器人运行状态的监视等。
3 工程试验
黄河小浪底水利枢纽集减淤、防洪、防凌、供水灌溉、发电等为一体,是黄河干流上的一座大型综合性水利工程,也是治理开发黄河的关键性工程。小浪底水利枢纽设置了3条排沙洞,排沙洞进口底高程为175 m,每条排沙洞有6个进水口,共计18个进水口,进水口宽3.50 m,高6.30 m。大坝排沙涵洞正常与否关系到整个枢纽工程的安全运行。
2019年11月18日,深水疏堵机器人在河南省黄河小浪底大坝开展工程试验。深水疏堵机器人下放前,首先检查各执行元件的功能是否正常,并根据大坝的资料以及现场具体情况,设定并校核有关元件的参数,如惯性组合导航的航向角等。
深水疏堵机器人通过吊车、电动葫芦等进行布放。机器人完全入水后,检查机器人的通讯情况以及各传感器的工作状态,同时开启摄像头、高度计、灯等监控设备。在布放过程中,通过摄像机可以发现:由于大坝表层水质较好,摄像机可以清楚地看到大坝坝体及机器人本身。随着机器人入水深度增加,由于水库上游挟带泥沙的水流入库内,产生异重流输沙,异重流运行到大坝前聚集形成浑水。由于底层水质变浑,摄像机的画面开始变模糊,最后完全看不清。
机器人下放过程中,在控制室观察各项数据是否正常,用惯导来监测车体航向角,姿态调节装置调整机器人车头朝向进水塔方向,深度计和高度计分别实时监测设备的入水深度和离地高度。由于水流的影响,机器人会以布放钢缆为轴线旋转,惯性组合导航会自动记录机器人旋转角度及自身姿态。一旦机器人旋转角度超出设定值,中央控制系统启动相应控制程序,开启姿态调整装置,推动机器人朝偏离方向的反向旋转,使机器人车头正对大坝,回复到原来设定的航向。
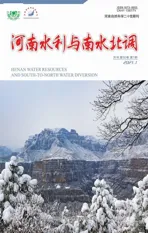
着底后机器人通过车载图像声纳进行目标搜索,成功找到大坝上目标涵洞,见图2。由图可见,机器人与目标涵洞两者轴线不一致,呈一定的角度。这是因为机器人在着底阶段,当惯性组合导航的航向角超出设计值时,引起姿态调整装置启动,调整中的机器人可能与大坝底部碰撞,造成机器人损坏,所以着底阶段姿态调整装置设定为关闭,不调整姿态,从而造成机器人的航向角与目标涵洞轴线有一定的偏角。
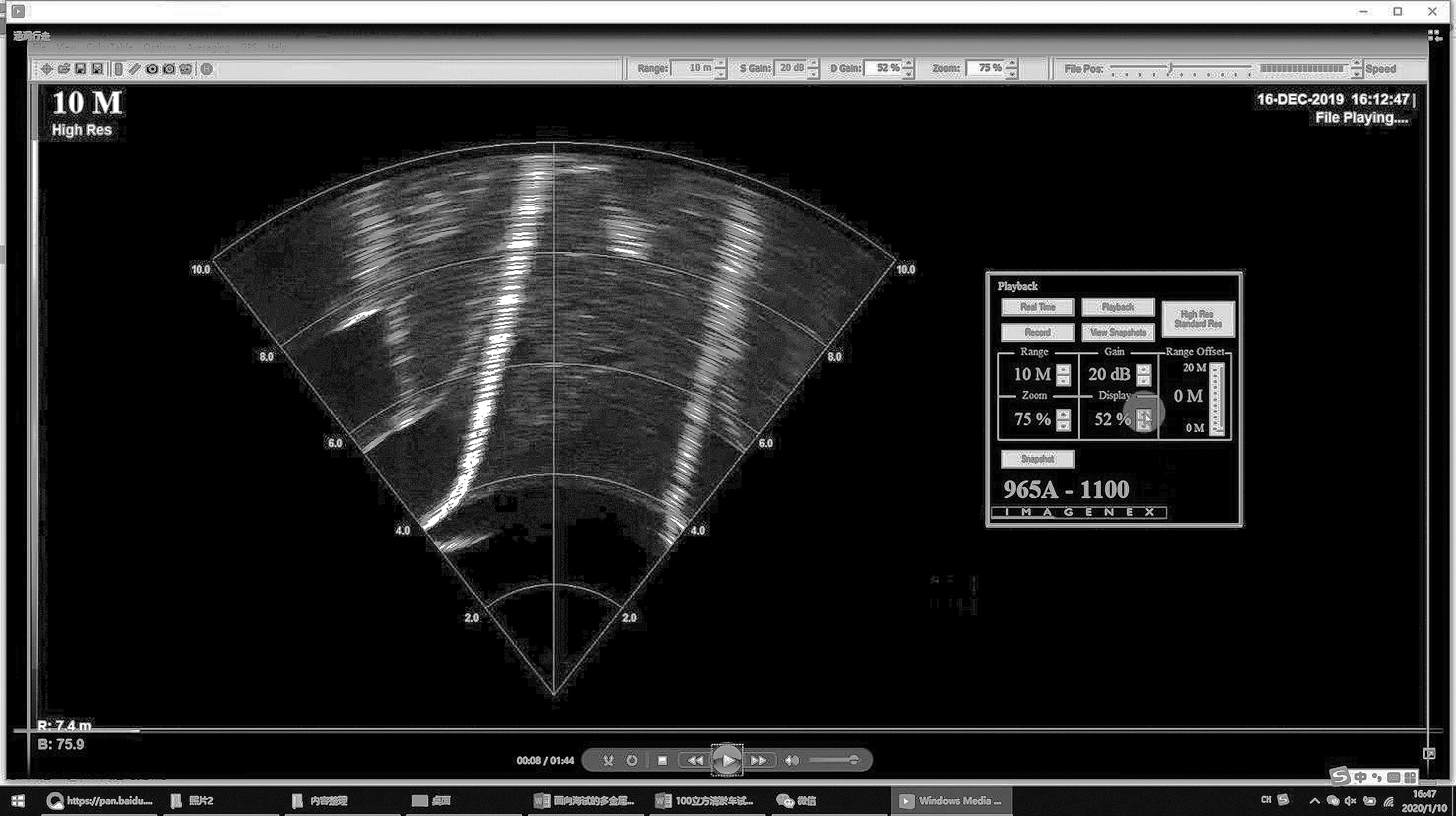
图2 大坝涵洞图像图
深水疏堵机器人在发现目标涵洞后,设定涵洞轴向处的航向为目标航向,通过自动定向行走控制,将机器人的航向调整到目标航向一致,见图3。然后利用综合导航控制系统,通过自动程序控制,进入涵洞,并行走到目的区域,开展疏堵作业,完成整个工程试验。
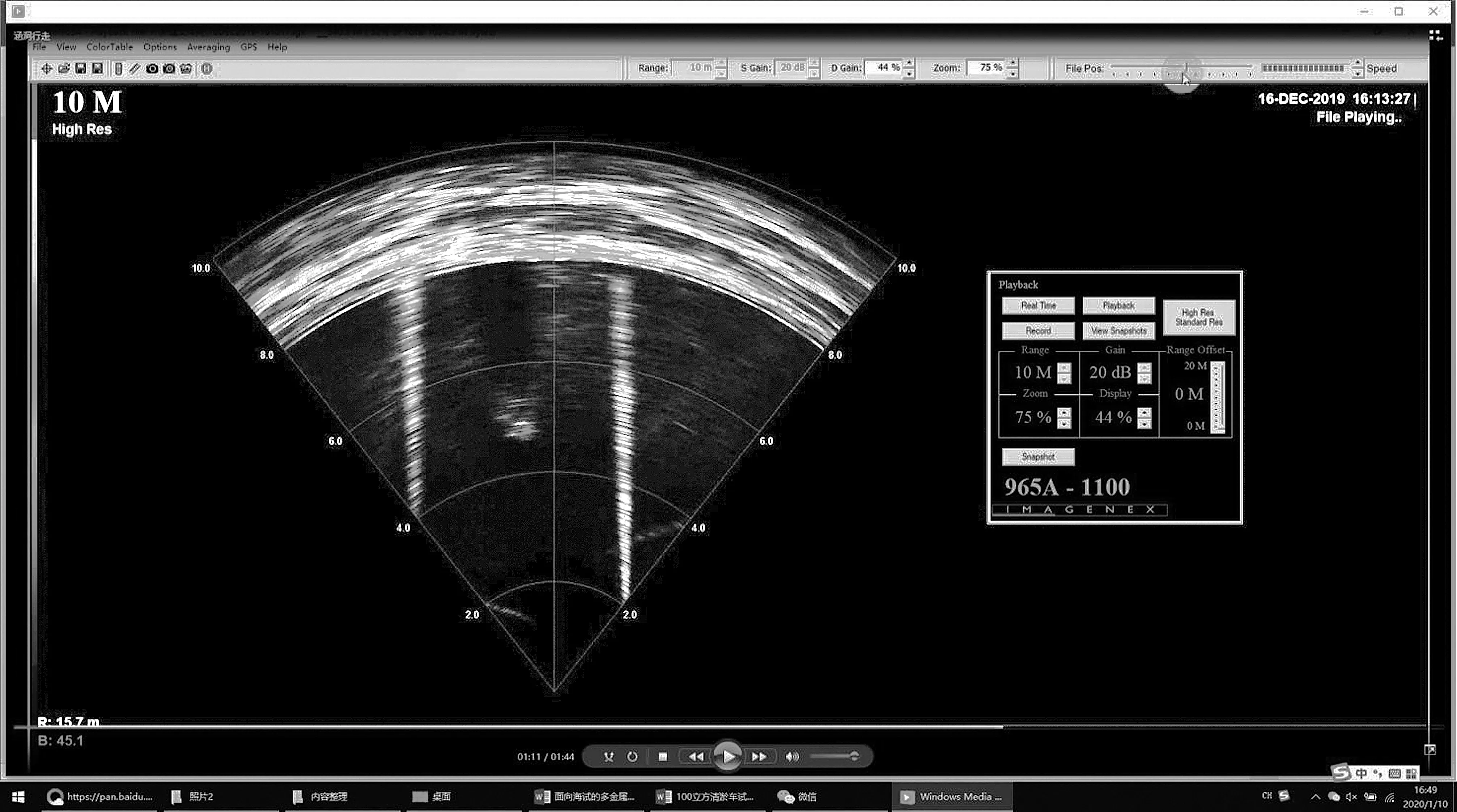
图3 机器人行驶图
4 结论
深水受限空间(各种深水孔洞等)环境复杂、能见度低、作业条件差,机器人在此范围内作业必须具备水下监控和环境感知设备,自动进行环境识别,为水下机器人作业规划提供依据和决策支持,提高深水作业的科学性、可预见性、安全性和生产效率。
水下监控和环境感知设备类型不同,适用范围也有区别。在黄河小浪底大坝前,水下摄像机到达一定深度水域后,由于水质浑浊的影响,水下摄像机画质变差,甚至失去作用。图像声呐在大坝前能够完成搜索目标涵洞的工作,画质清晰。也可以采用多波束进行地形地貌的探测。在深水孔洞环境中,应综合运用多种装备和技术手段,进行冗余设计,提高工程应用的可靠性。
在深水环境中,机器人除了具备水下监测和环境感知设备外,还必须具备导航设备。实验中机器人在惯性组合导航和图像声呐的作用下,自行到达目标区域,完成精准高效的试验。
针对深水环境下深孔建筑物淤堵及闸门提取存在的典型问题,研发了一套深孔建筑物的水下自行检查、清理淤积、疏通封堵、水下爆破切割、水下修复等多功能于一体的水下成套设备与技术,解决了目前中国国内众多高坝大库容、大深度水下建筑物运行安全问题,同时提高深水闸门运行过程中非常规情况下的快速抢险及应急处置能力。该套设备的成功研发与应用将保障国家公共安全,确保水利行业以及国家经济可持续发展,在实现中国节能减排和改善生态环境的长远目标上具有重大的经济和社会效益。