无人机在负载突发扰动中的控制技术研究
2021-03-24侯力枫宋新利席海阔范士清柴振华刘明辉
侯力枫,宋新利,季 宁,鲁 杰,席海阔,范士清,柴振华,刘明辉,李 壮
(国网冀北电力有限公司承德供电公司,河北 承德 067000)
0 引言
为了保证架空输电线路的安全稳定运行,输电线路需要定期进行巡检,及时发现线路存在的隐患和缺陷[1-2]。随着架空输电线路长度不断增长,传统人工巡视难以满足需求,近年来无人机和机器人等新技术不断应用在电力系统中,极大提高了输电线路的巡检效率、缺陷的识别率和准确度、故障位置的精确查找等。电能通过架空输电线路进行传输,其运行状态影响着电能输送的质量,如何实现输电线路高效、准确、经济的运维水平,从而确保电网的可靠性是首要目标[3-4]。由于电网运行在自然环境里,受到环境中各种因素的影响,容易引起金具缺失、导线断股、绝缘子发热等隐患。当线路带电运行过程中,为了及时消除线路隐患,同时确保人员安全的条件下,采用无人机和机器人的模式,可以实现线路的带电作业[5-6]。
通过上面的分析,结合无人机和机器人两种新型技术,实现输电线路的自主巡检,是输电线路巡检的发展趋势,该技术可以进行线路隐患的带电排查及治理,对于线路的安全稳定运行具有重要的价值。架空输电线路智能无人机巡线机器人的研制,以架空输电线路地线为行驶路径,包括作为运输载具的无人机和在地线上行走的巡线机器人,利用独特设计的装载接口,以及投放和回收装置,将两部分结合在一起,实现无人机自主飞行、机器人自动投放与回收、自主巡视等,如遇跨越塔头和障碍物等情况,利用无人机将机器人进行运输跨越,既避免对杆塔本体进行改造,又降低了机器人避障部分机械机构的复杂设计,大大降低机器人的重量与体积。通过携带的热成像组件和带有激光校准标定的高清晰摄像机对线路实施巡检,重点对导地线、绝缘子、金具温度和异常破损检测。
1 飞控系统
根据巡线机器人的重量,选择鲲鹏智汇KPM-28系列无人机平台,并根据要求进行相应的定制(如图1)。KPM-28无人机是鲲鹏智汇为工业级行业应用领域打造的六旋翼飞行平台,该机型采用高比强度复合材料和快速拆装设计,且配备强劲的动力系统,在续航时间和载重量方面有显著优势;开放的SDK和可扩展的结构使得该机型可搭载多种设备,满足不同领域的应用需求。KPM-28的基本参数如表1所示。

图1 无人机平台Fig.1 UAV platform
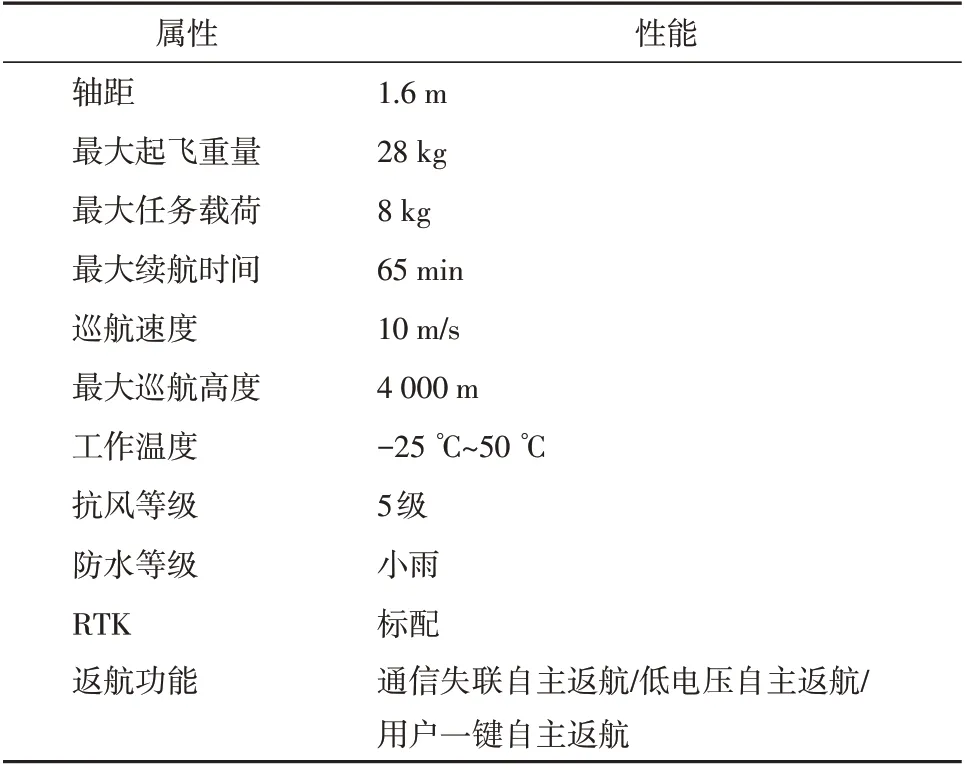
表1 KPM28的基本参数Table 1 Basic parameters of KPM28
飞控系统采用鲲鹏智汇具有独立知识产权的KP旋翼飞控系统,选用高精度、高可靠性的传感器系统,结合先进的控制与导航算法,为行业级无人机提供安全性好、可靠性高、精度高的飞行控制系统。丰富的可扩展接口以及稳定的载荷控制系统,可实现不同用户的定制化需求。
KP旋翼飞控系统设计了两个模块,分别是机载模块与地面端模块,如图2 所示。机载模块主要包括主控板、通信模块以及电压监测模块。主控板是飞控系统的核心部件,其中包括带有独立减震结构的IMU、气压计和磁力计模块,再结合GNSS模块,可实现高精度的导航与控制功能。通信模块主要通过无线数传的方式实现机载端与地面站的通信[7-8]。电压监测模块可实现对无人机电池电压的实时监测,保障飞行安全。地面站模块含有两个模块,分别是无线Wi-Fi 模块与GNSS 模块。其中前者的功能是完成地面站软件的无线通信连接,具有容易操作的特点。此外,地面站模块内置可充电式的独立电源,连续工作时间长达8 h以上。

图2 KP旋翼飞控系统Fig.2 KP rotor flight control system
2 扰动控制技术分析
针对六旋翼无人机系统,为了达到点对点飞行方式,采用内环操作与外环操作的模式,该操作模式如图3 所示。前者实现欧拉角操作模式,后者的作用是实现3个线位移操作模式,并且,能够输出期望的欧拉角数据,从而完成内环的反馈数据[9-10]。
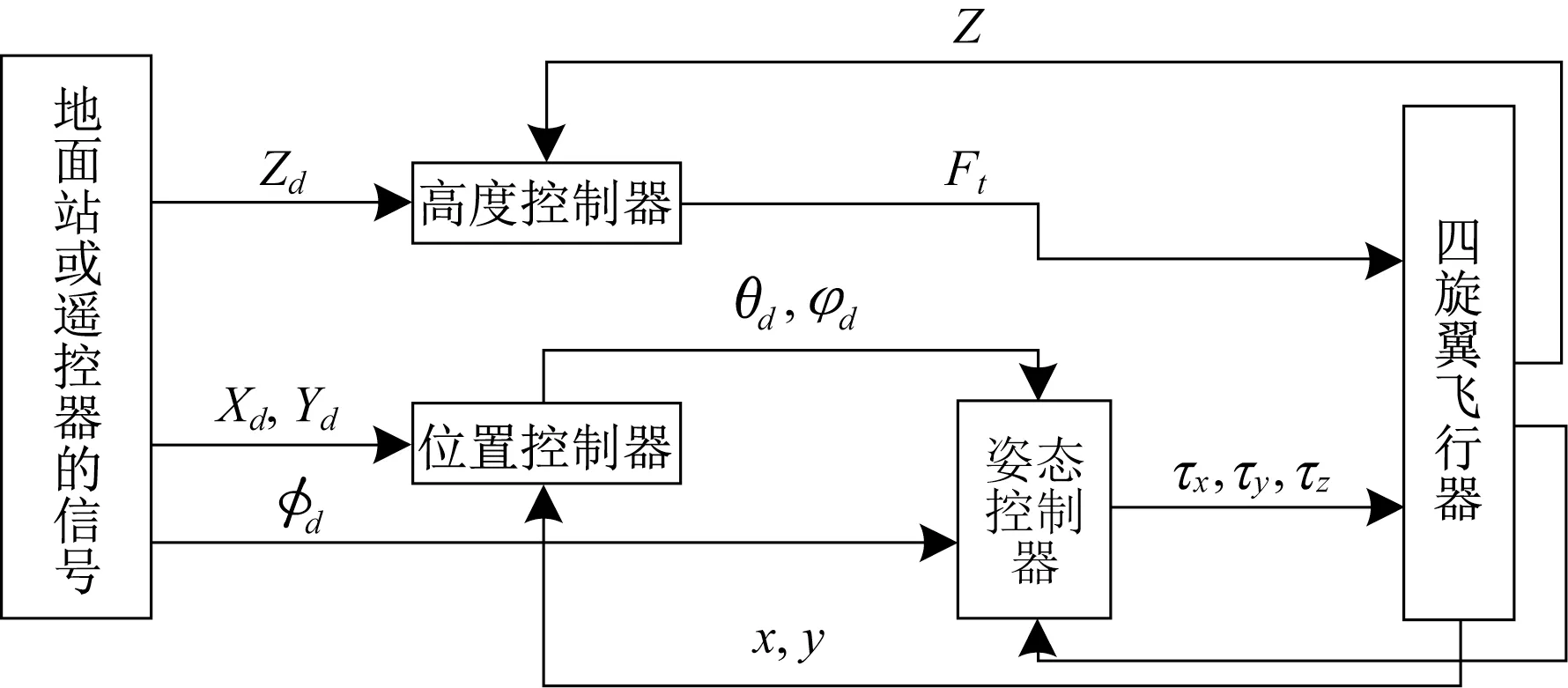
图3 控制结构图Fig.3 Control structure diagram
为了方便系统的控制,通过在各控制器里设置PID控制器的模式,从而更好地消除外界干扰与系统噪声对无人机控制系统的影响,以及无人机投放或者连接机器人带来的系统变结构干扰,导致系统出现负载突发扰动过程,本文引入自抗扰控制理论(ADRC)对飞控系统进行设计。如图4所示为控制器的基本结构。
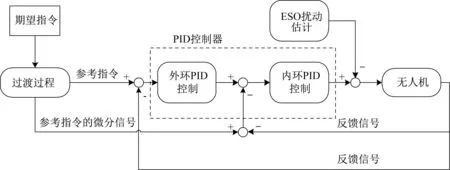
图4 加入自抗扰的控制器基本结构Fig.4 The basic structure of the controller with active disturbance rejection
期望指令信息首先经过过渡过程的处理,过渡过程的存在主要是为了防止突变信号以及超出无人机机动能力范围外的指令,对期望信号进行平滑处理,给出合适的参考指令及其微分信号。PID控制器采用的是双闭环串联式结构,外环控制目标物理量,内环对目标物理量的速率进行控制,得到PID控制输出。扰动估计主要将系统未建模部分以及噪声等统一为扩张状态,并通过扩张状态观测器对定义的扩张状态进行实时的估计,并对PID控制输出进行补偿,得到最终的控制器输出。具体实施时,首先将多旋翼等效为1个二阶系统:

对于位置和高度控制,系统可表示为以下的一阶系统:
式(4)中,xdot表示速度,f(xdot,t)为与速度有关的非线性时变函数,w(t)为未知干扰,u为控制指令。令系统的表现量a(t) =f(x,t)+w(t),则可建立以下的扩张一阶系统:
对以上扩张系统建立二维扩张状态观测器,其表达式如下:
适当地选取参数β1和β2,扩张状态观测器的状态zi(t)可以很好地跟踪系统的状态变量xi(t),即zi(t) ≈xi(t)。因为扩张状态观测器能够完成系统状态变量的在线分析,于是,能够设置控制量u补偿时所需的表现量a(t)如下:

因此,针对一阶非线性不确定对象,便能够设置成标准线性“积分器串联型”对象系统。对于以上转化后的系统,取合适的状态误差,反馈得到u0,其表达式如下:
3 结语
随着无人机在输电线路巡检工作所占比例越来越大,本文选择鲲鹏智汇KPM-28系列无人机平台,搭载巡线机器人,充分结合了两者的优势,对输电线路巡检具有一定的价值。通过在各控制器里设置PID控制器的模式,从而更好地消除外界干扰与系统噪声对无人机控制系统的影响,以及无人机投放或者连接机器人带来的系统变结构干扰,导致系统出现负载突发扰动过程,本文引入了自抗扰控制理论(ADRC)对飞控系统进行设计。研究表明,该系统可以快速应对无人机复杂突变引起的扰动,实现无人机的稳定控制,确保架空输电线路智能无人机巡线机器人复合系统的运行稳定,充分保证输电线路的安全。