工业管道内机器人通信技术的研究*
2021-03-24钟永轩陈锐鸿林子涵朱彦昭梁镇峰
钟永轩 陈锐鸿 林子涵 朱彦昭 梁镇峰
(华南理工大学广州学院机器人工程学院,广东广州 510800)
0 引言
在工业中,管道应用十分广泛,管道负责通风排气、负责废料运输,在工业建设中起重要作用。管道需要定期保养和维护,但管道数量多,维护难度大,维护成本高且耗费大量人力物力。为了提高管道维护的效益,延长管道使用寿命,需要开发一款管道机器人,用于管内巡检,针对性地对管道进行维护保养[1-2]。管道物理特征并不是统一的,有圆管,有方管;有管径大的,也有管径小的;有地沟管道,也有顶层风管;有金属材质的,也有混凝土材质。目前的管道机器人针对性很强,机械结构和控制方式需要根据特定应用场景进行设计, 满足越障能力、负载能力和系统集成能力[3]。通信技术选择也是需要经过严密考虑的。
1 机器人通信技术介绍
机器人通信技术有许多,按照介质可以分为有线通信和无线通信两种。
1.1 有线通信介绍
有线通信是在实体物质上传播的,通信介质为双绞线、同轴电缆和光纤。双绞线根据有无屏蔽层可分为非屏蔽双绞线(UTP)和屏蔽双绞线(STP),屏蔽双绞线的金属层能够消除电磁干扰,抗干扰能力强。同轴电缆可分为基带同轴电缆和宽带同轴电缆,基带同轴电缆屏蔽层通常是用铜做的网状结构,特征阻抗为50Ω,用于传输数字信号;宽带同轴电缆屏蔽层通常是用铝冲压而成,特征阻抗为75Ω,用于传输模拟信号。光纤和同轴电缆相似,但没有网状屏蔽层,中心是光传播的玻璃心,可以大致分为多模光纤和单模光纤两类。3种有线通信方式的特征比较如表1所示。
1.2 无线通信介绍
无线通信是利用电磁波信号在自由空间中传播的特性进行信息交换的通信方式。在无线通信中一般涉及通信协议,通信频率,通信信道,网络安全等问题。我们只要把握无线技术的选择,而无需过度研究硬件技术的开发。无线技术包括常见的蜂窝式网络(2G/3G/4G/5G)、无线感测网络(ZigBee、蓝牙)、无线网络(WLAN包括WIFI)。几种无线通信技术如表2所示,此外无线技术受干扰能力会比有线技术更强,主要受噪声影响,还与通信频率有关。

表1 有线通信特征比较Tab.1 Comparison of wired communication characteristics

表2 无线通信技术比较Tab.2 Comparison of wireless communication technologies
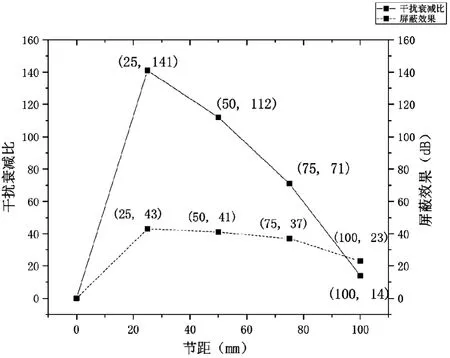
图1 双绞节距与屏蔽效果、干扰衰减关系Fig.1 Relationship between twisted pair pitch and shielding effect, interference attenuation
2 机器人有线通信系统研究
2.1 有线控制干扰分析
目前研究的管道机器人较多使用有线控制方式,采用柔性的双绞线作为通信线缆。管道机器人通信涉及到控制、图像传输和电源这3大部分。如何解决电源线与信号线的布线,是研究人员需要解决的问题,需要根据传输距离、信号衰减、成本等因素决定通信方案,因此,把电源线和信号线用一根双绞线替代布线是一种值得考虑的方案。
双绞线一般在传输频率低于100kHz,距离较短时适用效果更好,最大传输距离为100m。双绞线中信号干扰主要来自于外部因素干扰和内部线与线之间的串扰[4]。干扰的本质就是电磁感应,电磁感应公式为公式(1)。其中ε为感应电动势,n为线圈匝数,Δ 为磁通量变化量,B为磁感应强度,面积为S。感应电流公式为公式(2)所示,E为电动势,R 为阻抗。
根据公式(1)可知,抑制电磁感应可以缩小感应回路面积,从而减小感应电流。而双绞线绕线的原理就是根据电磁感应得出的,经过纽绞后的线,感应电压极性相反,在每根导线上的感应电流相互抵消。而屏蔽效果还与纽绞程度有关,节距反应纽绞程度,如图1所示。
2.2 双绞线管道机器人通信设计
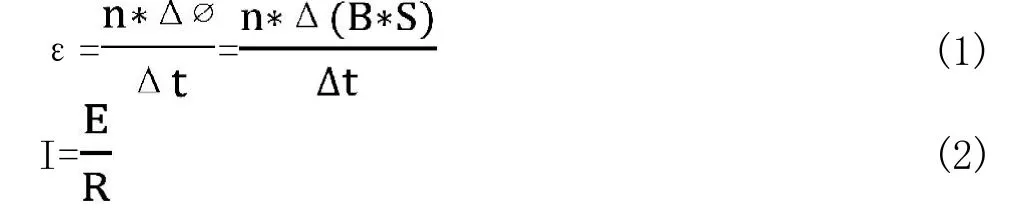
以我们设计的基于PLC有线控制的管道机器人为例,采用局部屏蔽方式,将电源线(电源电压为24V)与信号线以胶皮或屏蔽网隔开,如图2所示,在同一根50m多芯线里面不受干扰,布线结构如图3 所示,经过威纶通触摸屏数据测试,数据能够稳定传输,模拟量电压测试正常,如图4所示。
PLC与触摸屏采用RS485通信协议,最高传输速率达到10Mbps,且抗噪声干扰性好,理论上最大传输距离能达到1200m。控制方面采用模拟量控制,左轮和右轮各对应一个通道,通过计算车轮参数所对应的理论电压,与实际测量电压比较,50m电压差距低于0.1V,且通道间电压无偏差。
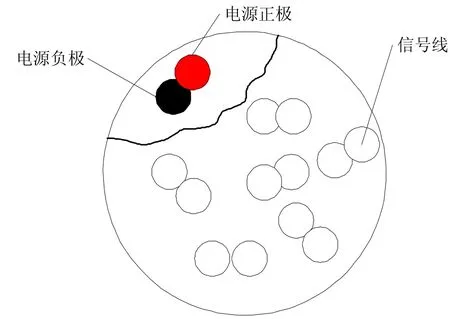
图2 多芯线内部布线Fig.2 Internal wiring of multicore wire
图3 布线结构Fig.3 Wiring structure
摄像头经过多芯线和交换机,再将图像传输到PC端。能够清楚看到管内情况,由于作屏蔽处理,图像传输质量以及响应不受干扰影响[5]。除了导线的纽绞,一般克服干扰方式还有屏蔽、接地、平衡、滤波、隔离等方法,一般都会采取多种措施,实现更稳定的数据通信。
3 机器人无线通信系统研究
有线机器人绕线繁琐,设备重、搬运不方便,缺乏灵活性。在一些信号干扰弱的管道内,无线机器人更具优势,可以减少线对车体的载荷,控制灵活,车体可以做得更轻巧,在上下管道时容易操作[6]。在众多无线通信技术中,我们以WIFI通信作为管道机器人的研究方向。
3.1 无线控制干扰分析
WIFI采用的是802.11协议,工作在2.4GHz的UHF或5G SHF IMS射频频段上[7]。WIFI是半双工通信,若AP和用户终端使用频率相等将产生冲突。影响WIFI信号的因素有很多,主要有4大方面[7]:
(1)输出功率:无线路由输出功率越大,覆盖范围越远。
(2)天线类型和增益:一般来说外置天线比内置天线对信号的增强作用更明显。
(3)环境影响:墙壁和障碍物会影响WIFI的信号传播能力,容易吸收信号的电磁能量。
(4)信道干扰:当附近有较多无线路由信号时,由于WIFI中14个频道只有1,6,11这三个频点是互不干扰的,路由器常集中在这3 个信道里,就会容易产生信号的串扰,严重干扰正常通信。
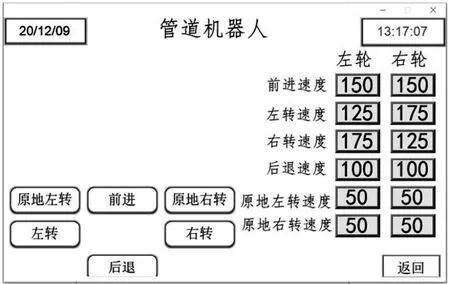
图4 管道机器人控制界面Fig.4 Control interface of pipeline robot
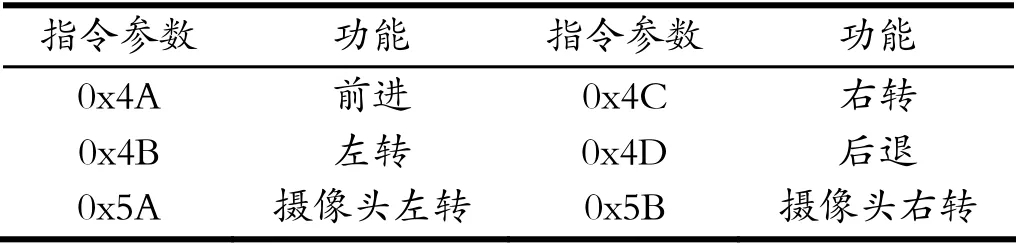
表3 控制指令参数Tab.3 Control command parameters
3.2 无线通信管道机器人设计
在无线管道机器人设计上,采用WIFI模块,实现图像传输和指令控制功能。在硬件方面, W I F I 模块使用Openwrt嵌入式Linux系统,实现智能路由联网功能[8]。在图像传输上,使用Mjpg-streamer推流服务,将挂载在Usb接口上的Mjpg格式的图像数据,封装成http协议的视频流,发送给8080端口。当上位机连接到WIFI模块上的W I F I 时,就可以对视频图像进行实时监控。如图5 所示,用户输入IP地址http://192.168.1.1:8080/?action=stream即可实时显示图像,图中是在实验室进行通信信号测试及通信距离测试,得出以下结论:空旷环境下信号延迟低,图像清晰;穿墙能力弱,容易在转角位出现高延迟,随着距离的增大信号变弱;附近无线设备增加,容易出现信道干扰。
在管道机器人控制上,也是通过WIFI模块进行双向数据转发,以服务的通信方式允许客户端(Client)发布请求,由服务端(Server)反馈应答。上位发送指令参数到2001端口,经由Ser2net推送到WIFI的TTL硬件串口,串口对下位机STM32开发板发送指令,STM32开发板接收指令执行[9-10],其过程是通过配置串口的波特率、字长、停止位、校验位、收发模式和硬件流,初始化串口;利用串口中断接收函数,以中断的方式接收指令,当收到指令时会进入中断函数,触发串口中断,接收到一个字节中断一次;然后进入串口接收完成回调函数,判断接收指令参数是否满足条件,若满足则触发动作,不满足则返回错误提示且不触发动作。控制指令如表3所示。反之,下位机STM32开发板反馈数据信息通过串口发送给WIFI模块,经由Ser2net发送到2001端口,实现上位机数据信息的显示。
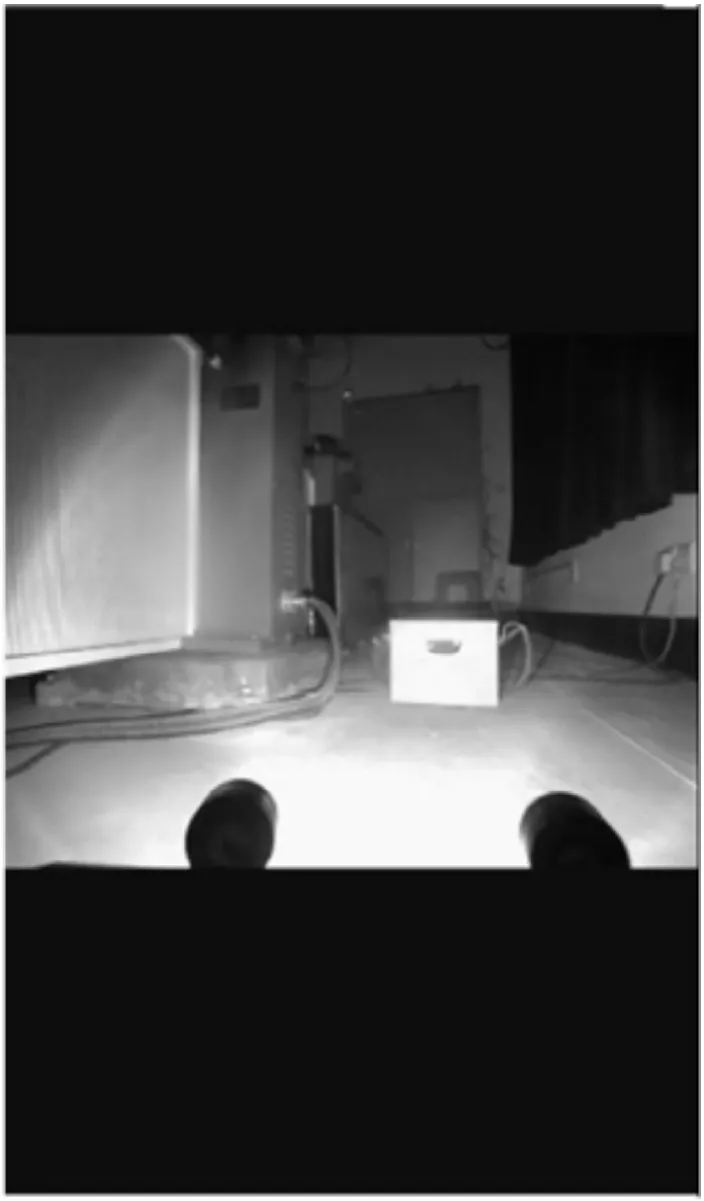
图5 视频监控画面Fig.5 Video monitoring screen
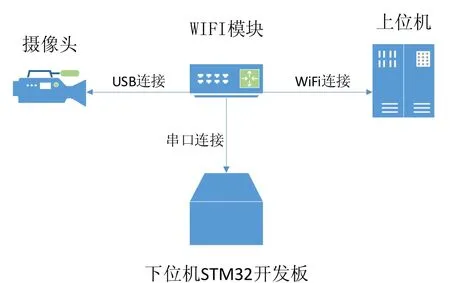
图6 无线通信连接结构图Fig.6 Structure diagram of wireless communication connection
无线管道机器人的通信连接结构如图6所示,以WIFI模块为核心,通过协议上下位机进行互连,实现网络层的连接;其次摄像头与S T M 3 2 单片机数据流实现了物理层的连接,串口通信采用全双工的通讯方式,允许数据同时在两个方向上传输,传输速度快,响应快。
4 结论
通过对工业管道内通信技术研究,对有线通信和无线通信技术作比较分析,并以双绞线和WIFI通信技术为例,搭建机器平台,通过迭代的设计方式对管道巡检机器人进行设计开发,完成模拟场地测试和管内测试,验证这两种通信技术的实用性和可行性。为工业管道内通信技术的选择提供可参考依据。
