最大互相关熵多凸组合自适应滤波算法
2021-03-17卢明飞彭思愿陈霸东
卢明飞 彭思愿 陈霸东*
①(西安交通大学人工智能与机器人研究所 西安 710049)
②(南洋理工大学电气与电子工程学院 新加坡 639798)
1 引言
作为信息论学习领域的一种鲁棒优化准则,最大互相关熵[1,2](Maximum Correntropy Criterion,MCC)近年来在数据分类、图像处理、自适应滤波等领域已经成功得到广泛应用[3–7]。与基于最小均方误差准则(Minimum Mean Square Error, MMSE)的LMS (Least Mean Square), RLS(Recursive Least Mean)及其各类改进自适应滤波算法[8,9]相比,基于MCC准则的算法在对抗非高斯噪声(特别是重尾噪声)方面具有更好的鲁棒性[10]。而诸如无线通信、语音处理等实际工程应用中,信号均受到不同程度的重尾噪声污染[11]。因此,基于MCC准则设计自适应滤波器在相关领域是很好的选择。
收敛速度与稳态误差之间的矛盾是自适应滤波算法中存在的固有问题,MCC滤波算法也不例外。在传统基于MCC准则的自适应滤波算法中,步长和核宽参数的选择决定了算法的收敛速度、稳态误差和收敛稳定性。为此,研究人员进行了诸多改进工作,提出了诸如变步长MCC[12,13]、变核宽MCC[14,15]、多尺度核学习自适应滤波[16]、混合MCC[17]等,取得了一定的成果。
凸组合的方式能够充分发挥被组合独立滤波算法各自的性能优势,同时保证算法收敛的平滑,在一定程度上降低参数选择的难度。这一思想在LMS系列算法上最先得到应用[18–20]。文献[21]也提出了对不同步长参数的两个MCC滤波算法进行凸组合的策略,成功将这一思想引入MCC自适应滤波。文献[22]进一步提出了多凸组合LMS算法,取得了很好的效果。受此启发,本文提出一种基于MCC准则的多凸组合自适应滤波算法,通过组合多个独立MCC滤波算法,从而获得滤波算法性能的提升。
本文对所提多凸组合MCC滤波算法进行了理论分析,得出了其均值收敛的条件,并证明了该算法稳态均方误差可逼近被组合算法中的最小值。对所提算法进行了仿真分析,结果表明,在面对高斯和非高斯噪声以及噪声环境突变时,所提算法均具有良好的收敛性能。
2 基于MCC准则的自适应滤波
2.1 MCC准则
互相关熵(correntropy)是两个随机变量X、Y之间相似性的一种度量,其定义为[1]

其中, E (·)代 表期望,κ (·,·)是核函数(通常为某种径向基核函数),FXY(x,y)是 随机变量( X,Y)的联合分布函数。本文中核函数采用高斯核

其中, σ >0是核宽参数。在实际应用中,由于FXY(x,y)未知且采样数据有限,可对互相关熵进行经验估计

针对自适应滤波应用场景,可以通过最大化期望信号和滤波器输出之间的互相关熵(即相似度)来优化算法参数,即采用最大互相关熵准则(MCC)[1]

其中,en为 第n时刻期望信号与滤波输出之间的误差。针对随机梯度滤波算法,通常采用以下瞬态MCC准则

2.2 MCC准则自适应滤波
对于包含噪声干扰的未知线性信道,输入信号Xn经信道传输后观测到输出信号为

其中,W∗∈RN为信道权向量,vn为随机加性噪声。基于瞬态MCC准则,推导自适应滤波算法如下

其中,μ为步长,f (·,·), en计算如下

2.3 双凸组合MCC准则滤波算法
文献[21]提出双凸组合MCC准则滤波算法

其中,{ Wi,n}(i=1,2)为按照式(7)进行独立更新的两个不同步长MCC准则滤波器权向量,凸组合参数ϑn计算如下

进一步,ξn也 按照瞬态MCC准则下梯度法优化

3 多凸组合MCC自适应滤波
3.1 算法结构
本文提出使用m(m≥2)个MCC准则滤波算法进行凸组合形成多凸组合MCC自适应滤波算法

其中, Wi,n(µi,σi)(i=1,2,···,m)表示按式(7)进行更新的独立滤波器权向量。m个独立滤波器的步长与核宽取满足如下关系的不同值

组合参数计算如下

其中,f (·,·), ei,n参 照式(8)更新,en计算如下

显然,式(14)定义的组合参数满足以下条件

本文将上述多凸组合MCC准则自适应滤波算法简称为MC-MCC(Multiple Convex combination of adaptive filters under MCC)。
3.2 算法讨论
对MC-MCC算法中独立滤波算法的个数m、步长μ和核宽σ等参数进行不同配置,则其可形成步长凸组合MCC算法、核宽凸组合MCC算法等。
(1) 步长凸组合MCC准则自适应滤波算法
设置式(12)中m=2,且为两个独立自适应滤波算法选择不同步长和相同核宽,此时本算法即退化为步长凸组合MCC准则自适应滤波算法(Convex combination of Step-sizes for two adaptive filters under MCC, CS-MCC[21]):(2) 核宽凸组合MCC准则自适应滤波算法

设置式(12)中m=2,且两个独立滤波算法选择相同步长和不同核宽,此时本算法即为一种新型核宽凸组合MCC准则自适应滤波算法(Convex Combination of kernel-widths for two adaptive filters under MCC, CW-MCC):

(3) 多凸组合MCC准则自适应滤波算法
在本文算法的一般形式下,通过选择多个不同参数( µi,σi)的滤波算法进行凸组合,能够充分发挥各独立滤波算法的快收敛或低稳态误差优势,从而在很大程度上克服各独立核自适应滤波算法单独使用时收敛速度和稳态精度之间的固有矛盾。
当m=2时,本算法是新的“步长+核宽”凸组合MCC准则自适应滤波算法。当然,(1)和(2)中独立滤波算法个数大于2时,亦可以形成两种新算法:步长多凸组合MCC、核宽多凸组合MCC滤波算法,此处不再展开描述。
4 理论分析
4.1 均值收敛性分析
定义信道估计误差

结合式(12)和式(16)可得

此处,我们引入假设:
A-Ⅰ:输入信号{ Xn}是零均值独立同分布高斯随机信号;
A-Ⅱ:噪声信号{ vn}是零均值独立同分布高斯随机信号,且与{ Xn}相互独立;

A-IV:{ f(σξ,en)} 与{ Xn}相互独立;
A-V:E (f(σξ,en)) 存 在且有界,E (αi,n)存在。
依据A-III,对式(20)两边同时求期望可得

结合式(16)可得

根据文献[2],在A-Ⅰ~A-V假设下,µi选择为

即可保证各独立算法收敛于系统固有权向量满足

结合式(22)和式(24)可得

综上,只要满足式(23),MC-MCC算法估计的信道权向量将均值收敛于系统固有权向量。
4.2 稳态均方误差分析
采用超额均方误差(Excess Mean-Square Error,EMSE)分析所提算法的稳态性能。稳态EMSE定义为


由式(14)可得

假设所选各独立滤波算法全部满足EMSE收敛条件,其稳态EMSE有界且分别收敛至 Je,i。将所有独立滤波算法编号作为一个集合:

据此,可将式(28)分两种情况分析:


(1) 当i ∈A1时:


从而可得

结合式(28),可知

其中γi=µξE(fξ,n)E(ϕi,∞), 由于µξ>0, E (fξ,n)>0,E(ϕi,∞)<0, 则 γi<0。故上述过程成立的条件为

(2) 当i ∈A2时,与(1)同理可得

此时,γi=µξE(fξ,n)E(ϕi,∞)≥0,故上述过程成立的条件为

综合式(35)和式(37)可得

进而结合式(27)可得

假设A2中 元素个数不为1,则∃ i∗∈A2,使得

根据柯西不等式,可知 Je,i∗>Je,这与情况2矛盾,故假设不成立,即A2中只有1个元素

综上所述,可得

进而可得本算法稳态EMSE满足

由于本算法设置参数满足式(13),依据上述结论,则其稳态E M S E 最终将趋近于独立滤波算法1(i=1时,其稳态EMSE最小)。关于单个MCC准则自适应滤波算法稳态EMSE的理论分析可参考文献[7],此处不再赘述。
5 MC-MCC算法的工程化改进
由于高斯核函数的特殊性,当ξi,n绝对值较大时,αi,n的更新将趋于停滞。从实际工程应用角度考虑,可以适当限制αi,n和ξi,n为

设置 α+=0.99 ,ξ+按ξ+=0.5ln((m−1)α+/(1−α+))计算。
为了进一步提升算法的瞬态性能,考虑对偏离组合权向量较远的独立滤波器进行修正。当算法i同时满足权重占比较小(αi,n<β) 和方向偏离较大(|angle(Wi,n,Wn)|>λ)两个条件时,不再按照式(7)更新,替换为式(45)。

此处a ngle(Wi,n,Wn)可按式(46)计算

改进后的算法简记为IMC-MCC。
6 仿真分析
本文使用NMSD (Normalized Mean Square Deviation) 评价算法收敛性能,其定义为[22]

6.1 MC-MCC算法性能仿真
实验环境设置如下:
(1) 系统输入与噪声信号按高斯分布随机生成,输入信号符合N (0,1),信噪比设置为10 dB;
(2) 系统信道维度设置为5×1,权向量按N(0,1)随机生成;
(3) 独立滤波算法个数为4,各独立滤波算法及组合参数优化算法的参数设置见表1;
(4) 组合参数优化算法的参数( µξ,σξ)选择应符合以下原则:须使由其决定的MCC准则自适应算法的收敛速度远大于各独立滤波算法中最快的。
各独立滤波算法及多凸组合滤波算法的对比仿真结果如图1,图2所示。结果表明,MC-MCC自适应滤波算法具有以下特征:(1) 瞬态收敛速度始终能够逼近当前时刻收敛速度最快的被组合滤波算法;(2) 稳态NMSD趋于被组合滤波算法的最小值。这与理论分析结论一致。
6.2 IMC-MCC算法性能仿真分析
改进前后仿真对比如图3,图4所示,与原多凸组合算法相比,改进措施大大提高了各被组合算法的收敛速度,进而也使得改进后的多凸组合滤波算法加速收敛。其中( β,λ,θ)=(0.8,0.05,0.8)。
6.3 双凸组合算法性能仿真
多凸组合算法的优势已经得到验证,本节进一步验证算法退化为双凸组合MCC准则自适应滤波算法时的N M S D 收敛性能。本实验拟对两组MCC滤波算法(步长及核宽参数选择如表2)的多种组合进行仿真对比,验证其收敛性能和稳态精度。为了更加充分验证本文所提算法的工程应用价值,本文选择“高斯噪声+非高斯噪声”复合噪声环境,并分别使用“混合高斯”和“α-Stable”两种模型模拟实际工程中的非高斯噪声。

表1 算法参数设置
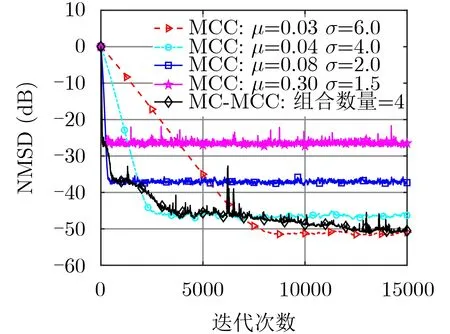
图1 算法收敛性能对比

图2 算法凸组合参数收敛过程

图3 改进前后算法收敛过程对比
(1) 混合高斯噪声环境试验
输入信号、系统参数设置同6.1节,噪声信号设置如式(48)。

其中,高斯噪声为标准高斯分布N (0,1),非高斯噪声采用混合高斯,其分布函数为

表2所列参数自由组合的2种经典MCC算法及其6种不同组合算法的对比仿真结果如图5所示。结果表明,在只用2个独立算法进行凸组合的情况下,本文提出的算法可获得优于算法式(17),式(18)的NMSD收敛性能:在高斯噪声和非高斯噪声以及噪声环境突变条件下,IMC-MCC算法均具有较快的收敛速度和较高的稳态精度。
(2) α-Stable噪声环境试验
将式(48)中非高斯噪声替换为α-Stable模型[23]


表2 算法参数设置

图4 改进前后算法组合参数收敛过程对比

图5 各种组合算法收敛性能对比1
其中,α ∈(0,2]是特征参数,代表噪声的重尾程度,β ∈[−1,1]为 对称参数,γ >0决定噪声的离散程度,而− ∞<δ <∞是位置参数。本试验中非高斯噪声参数设置为 (α,β,γ,δ)=(1.2,0,0.1,0),其余设置同本节试验(1))。
仿真结果如图6所示,在“高斯+α-Stable噪声(重尾噪声)”组合环境下,本文提出的多凸组合MCC算法(m=2时)在高斯噪声段和非高斯噪声段均可获得较快收敛速度和较小稳态NMSD。

图6 各种组合算法收敛性能对比2
7 结论
本文提出了一类基于最大互相关熵准则的多凸组合自适应滤波算法,并根据工程应用需求提出了改进措施。通过理论分析,推导了算法的均值收敛条件和稳态均方误差。数字仿真实验发现,相比于传统MCC、混合核宽MCC、步长凸组合CS-MCC以及核宽凸组合CW-MCC等算法,本文提出的多凸组合MCC算法在对抗高斯和非高斯噪声以及噪声环境突变时,具有更灵活的适应能力和更好的信道估计收敛性能。因此,本算法在信道估计、系统辨识等领域具有较大的工程应用价值。
