NOKOV红外光学动作捕捉系统精度测试
2021-03-13王涵连家斌
王涵 连家斌

摘 要:光学动作捕捉系统作为一种高精度的测量设备,可以用于获取目标物在空间中三维位置信息。精度是动作捕捉系统最重要的指标之一。为了研究NOKOV光学动作捕捉系统的定位精度结果,文章提出一种性能评估方法。性能评估方法包括静态和动态结果评估,其中分别进行绝对精度实验和重复精度实验,验证NOKOV动作捕捉系统的精密度和正确度指标。实验结果表明NOKOV动作捕捉系统的测量精度满足主要使用场景的精度要求。
关键词:NOKOV;动作捕捉;精度测试;重复精度;绝对精度
中图分类号:TP391.4 文献标识码:A文章编号:2096-4706(2021)15-0113-04
Abstract: As a high-precision measuring device, the optical motion capture system can be used to obtain three-dimensional position information of a target in space. Accuracy is one of the most important indicators of a motion capture system. In order to study the positioning accuracy results of NOKOV optical motion capture system, this paper proposes a performance evaluation method which includes static and dynamic results evaluation. Absolute accuracy and repetition accuracy testing are carried out respectively to verify the accuracy index of NOKOV motion capture system. The experimental results show that the measurement accuracy of NOKOV motion capture system meets the requirements of main application scenarios.
Keywords: NOKOV; motion capture; accuracy test; repetition accuracy; absolute accuracy
0 引 言
动作捕捉系统(Mocap)是一种记录物体或人的运动过程中实时位置的设备,目前广泛应用于各种不同的领域。其中被动光学式动作捕捉是各种动作捕捉形式中精度最高也是最常见的。由于其高精度、数据实时传输、同步多点测量等特点,除了传统的运动康复及影视动画方向,近年来被动光学动作捕捉系统也逐渐广泛用于工业场景中部件安装的点位测量,以及实验室开发机器人的控制与验证等对精度要求高的场景[1-3]。
动作捕捉系统本质上是一种测量设备,其中一个重要的指标就是精度。对于实验室内机器人室内定位场景(比如无人机、移动机器人室内定位),通常需要精度达到毫米级;工业装配场景点位测量精度要求达到亚毫米级。因此在使用前需要针对动作捕捉系统提出一种合理的精度测试方法,进行精度测试实验。
此前研究人员针对光学动作捕捉在不同场景下的应用设计了不同的性能评估方法。Furtado等通过在水平和倾斜平台上测试目标物在静态和动态条件下,比较多组动作捕捉系统的平均和最大绝对测量误差[4]。Richards等测量了四种型号动作捕捉设备的跟踪精度,测量标记点固定在一个线性运动平台上,并以不同的速度、加速度和冲击力移动[5]。Mizera等评估了三套手部跟踪系统的准确性,实验中反射标记贴在手上在一定范围内运动[6]。以上所有实验都进行了光学动作捕捉系统的正确度和精密度性能评估。
本文提出了一种光学动作捕捉系统的性能评估方法以及对应的指标,包含静态和动态的绝对精度(正确度)和重复精度(精密度),实验基于NOKOV动作捕捉系统完成。
1 动作捕捉系统介绍
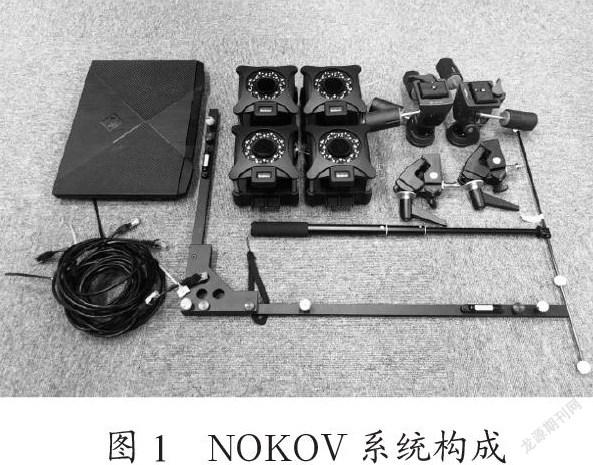
实验使用NOKOV(度量)红外光学动作捕捉系统,其构成如图1所示。
NOKOV动作捕捉系统采用被动式光学原理,利用红外光学镜头捕捉反光标识点来进行三维坐标测量,镜头向外发射红外光,通过捕捉反射回来的光线,将标记点信息储存为灰度图,将灰度图做二值化处理,利用像素点获取标识点在二维图像中的位置,对于同一标识点,只要同时被两个镜头捕捉到,就可以根据镜头的内外参数,利用双目视觉原理重构出标识点在三维空间中的位置坐标[7]。系统根据场地大小及目标捕捉区域不同,配置不同数量及参数的镜头。
动作捕捉系统主要由红外光学动作捕捉镜头、标定套件(T型、L型)、反光标识点、交换机、动作捕捉工作站(动作捕捉软件)构成。其中L型杆用于建立系统坐标系,T型杆用于标定相机内外参数。软件用于重构目标点在空间中的坐标,并将数据实时向外发送。
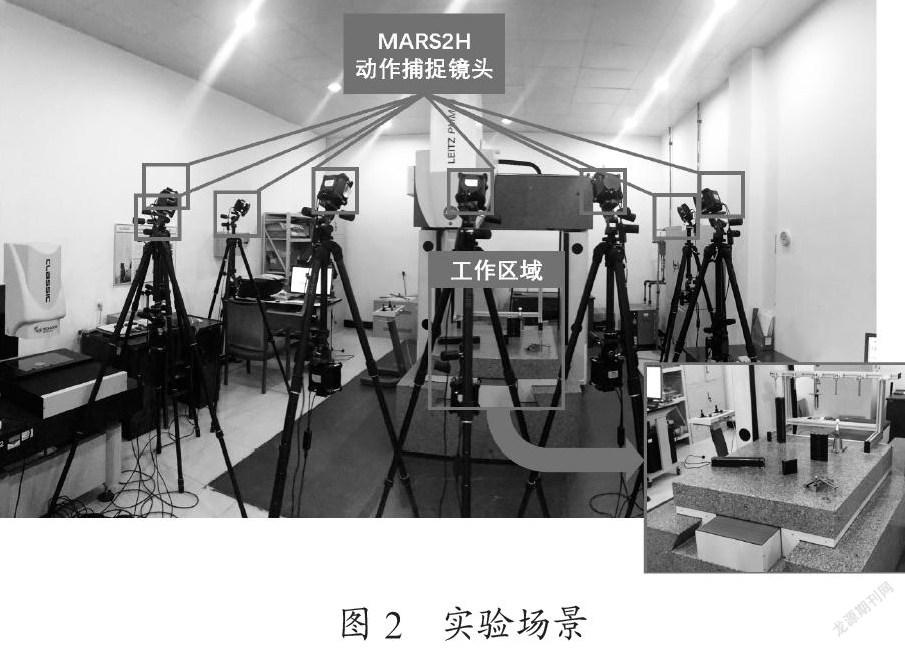
实验使用8个200万像素的NOKOV MARS2H动作捕捉镜头,镜头布置在场地四周,镜头的视野范围尽可能在工作区域重叠。实验区域如图2所示。
2 性能評估方法
动作捕捉系统的测量性能评估分为静态性能评估和动态性能评估。首先测量光学动作捕捉系统在工作区域中的静态绝对精度(正确度,trueness)和静态重复精度(精密度,precision)。然后进行动作捕捉系统的动态精度实验。
2.1 静态性能评估
静态正确度和精密度这两个指标分别反映了光学动作捕捉系统静态重复精度和系统误差。使用标准差(standard deviation, SD)来评估光学动作捕捉系统的精密度性能。在大理石平台上固定放置3个反光标识点,利用NOKOV动作捕捉系统采集10秒(采集频率100 Hz),计算的点空间坐标:
Ni是标识点i的总采样帧数。则标识点i的标准差计算为:
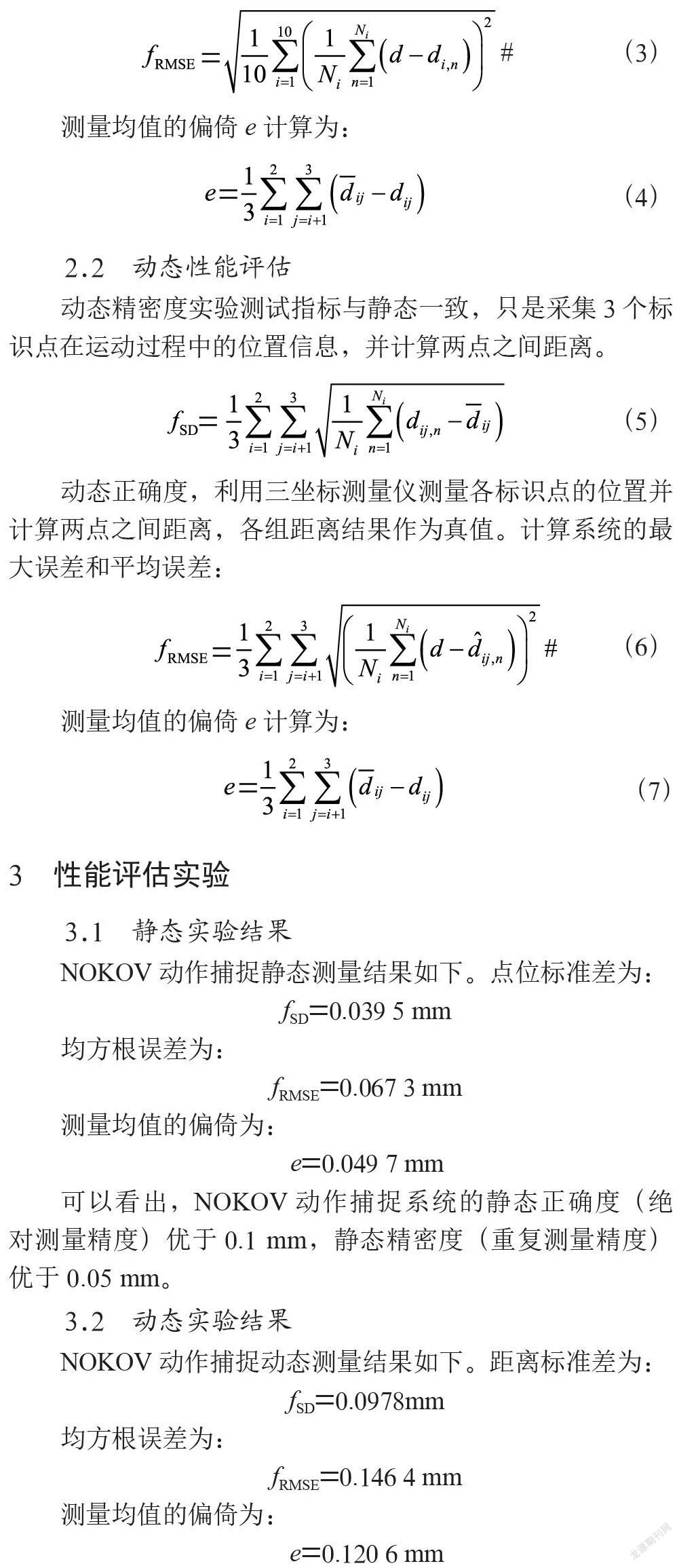
均方根误差(root mean square error, RMSE)用于评估NOKOV动作捕捉系统正确度性能。实验中反光标识点固定在激光跟踪仪的大理石移动平台上,平台的移动精度可以达到5 μm。平台移动的距离作为系统真值。平台单向移动1 000 mm,共计十次。每组起始位置和终止位置各停留5 s,每秒动作捕捉系统采集100帧。用表示动作捕捉系统计算得到的第i次起始和终止位置之间距离,d表示三坐标大理石平台移动的距离。系统的均方根误差可以计算:
测量均值的偏倚e计算为:
2.2 动态性能评估
动态精密度实验测试指标与静态一致,只是采集3个标识点在运动过程中的位置信息,并计算两点之间距离。
动态正确度,利用三坐标测量仪测量各标识点的位置并计算两点之间距离,各组距离结果作为真值。计算系统的最大误差和平均误差:
测量均值的偏倚e计算为:
3 性能评估实验
3.1 静态实验结果
NOKOV动作捕捉静态测量结果如下。点位标准差为:
fSD=0.039 5 mm
均方根误差为:
fRMSE=0.067 3 mm
测量均值的偏倚为:
e=0.049 7 mm
可以看出,NOKOV动作捕捉系统的静态正确度(绝对测量精度)优于0.1 mm,静态精密度(重复测量精度)优于0.05 mm。
3.2 动态实验结果
NOKOV动作捕捉动态测量结果如下。距离标准差为:
fSD=0.0978mm
均方根误差为:
fRMSE=0.146 4 mm
测量均值的偏倚为:
e=0.120 6 mm
可以看出,NOKOV动作捕捉系统的动态正确度(绝对测量精度)优于0.15 mm,动态精密度(重复测量精度)优于0.1 mm。而静态测量精度结果优于动态测量结果,是由于动态结果相对差是由于光学动作捕捉系统性原因导致(比如运动时点位图像的拖影)。
4 NOKOV动作捕捉系统检测实例
为了验证NOKOV动作捕捉系统在真实场景下的测量精度,进行了工厂装配场景静态点位测量和无人机飞行场景动态测量两组实验。
4.1工厂装配场景静态点位测量
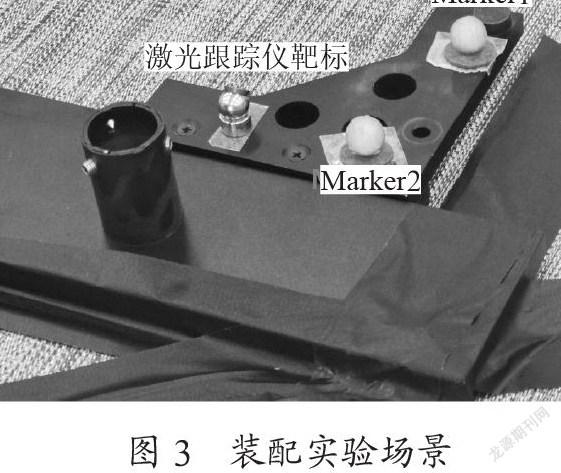
某工厂装配场景,设计方要求静态绝对测量精度(正确度)达到0.1 mm。传统方案利用激光跟踪仪进行定位可以满足精度要求,装配实验场景如图3所示,但是同时一台设备只能定位单点,变更测量位置需要人手动操作,工作效率低。利用多做捕捉系统作为定位替代方案。
在装配物上粘贴反光标识点和激光跟踪仪靶标。将装配物放置在5个安装点位上(安装点位在同一直线上,装配物无旋转)。在5个位置分别使用动作捕捉系统和激光跟踪仪进行测量,并计算两点位之间距离,激光跟踪仪测量结果作为真值。其中动作捕捉系统的采样频率为100 Hz,测量时长为10 s。
实验结果如表1所示,可以看出偏倚最大值为0.099 mm,均方根误差为0.073 mm。NOKOV动作捕捉系统的最大偏倚小于0.1 mm,满足正确度要求。
点位标准差结果为fSD=0.041 2 mm,重复精度优于0.05 mm。
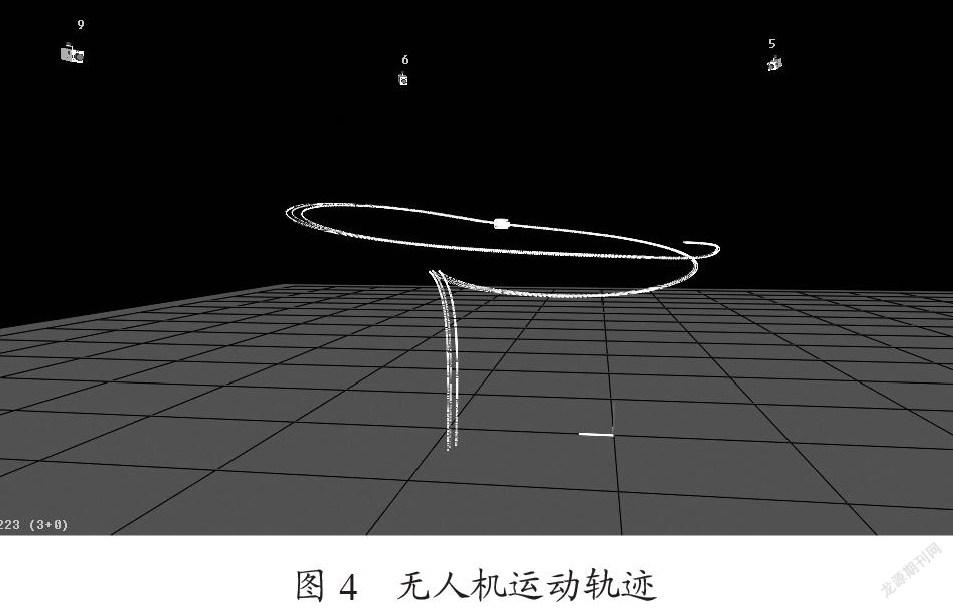
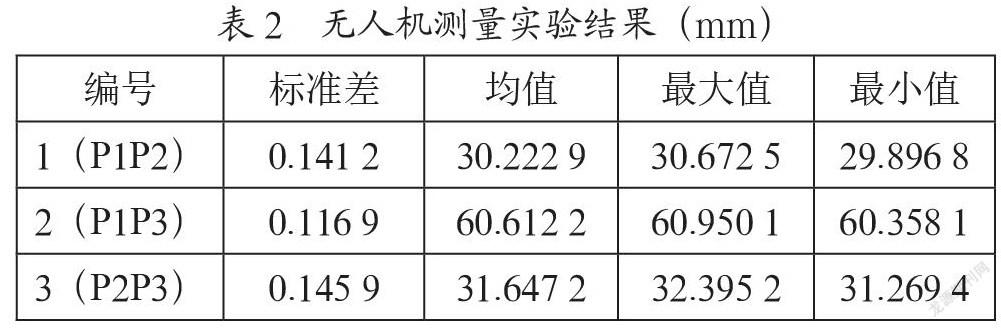
4.2 无人机室内定位场景动态测量
无人机上粘贴3个反光标识点,无人机视为刚体,点之间距离默认为是固定值,共计三组距离,无人机运动轨迹如图4所示。NOKOV动作捕捉系统采样频率为100 Hz,采样时常为75 s。共采集7 500帧数据。是计算各组距离结果。从结果可以看出,最大标准差为0.145 9 mm,动态精密度结果优于0.15 mm。
5 结 论
介绍了NOKOV(度量)红外光学动作捕捉系统,分别测试了静态和动态目标物下NOKOV动作捕捉系统的重复精度(精密度)和绝对精度(正确度)。精度测试结果如下:(1)对于静态目标的测量,通过分析一段时间内NOKOV动作捕捉系统的测量结果可得,系统的重复精度(精密度)优于0.05 mm;通过与三坐标测量仪系统的真实值结果对比,NOKOV系统的绝对测量精度(正确度)优于0.1 mm。(2)对于动态目标的测量,NOKOV动作捕捉系统的重复精度(精密度)优于0.1 mm;系统的绝对测量精度(正确度)优于0.15 mm。
此外,分别进行了典型场景下精度测试实验:(1)工业静态装配场景下,最大偏倚小于0.1 mm,标准差小于0.05 mm,满足场景下测量精度要求;(2)无人机室内定位场景下标准差小于0.15 mm,满足场景下重复精度(精密度)要求。
受测试条件限制,本次实验不是很全面,但是可以作为参考。后续将进行其他变量,比如系统采集频率、目标物运动速度等对动作捕捉系统精度影响的研究。
参考文献:
[1] 王伟嘉,郑雅婷,林国政,等.集群机器人研究综述 [J].机器人,2020,42(2):232-256.
[2] 杨明辉.基于循环神经网络的运动目标轨迹预测 [D].武汉:武汉大学,2019.
[3] FENG M,NI Z X,LI A,et al. Master manipulator optimisation for robot assisted minimally invasive surgery [J/OL].The International Journal of Medical Robotics and Computer Assisted Surgery,2021,17(2):(2020-12-20).https://onlinelibrary.wiley.com/doi/10.1002/rcs.2208.
[4] FURTADO J S,LIU H H T,LAI G,et al. Comparative Analysis of OptiTrack Motion Capture Systems [M]. Cham:Springer,2019.
[5] RICHARDS J G. The measurement of human motion:A comparison of commercially available systems [J].Human Movement Science,1999,18(5):589-602.
[6] WINDOLF M,GÖTZEN N,MORLOCK M. Systematic accuracy and precision analysis of video motion capturing systems—exemplified on the Vicon-460 system [J].Journal of Biomechanics,2008,41(12):2776-2780.
[7] 劉瑞.运动捕捉数据智能处理算法研究及应用 [D].大连:大连理工大学,2012.
作者简介:王涵(1992.12—),男,汉族,黑龙江哈尔滨人,产品应用经理,硕士研究生,研究方向:动作捕捉系统应用拓展。
3073500338276
