外骨骼式下肢康复训练器的设计探究*
2021-03-12黄孜君吴建美
黄孜君,吴建美
(安徽三联学院机械工程学院,安徽 合肥 230601)
0 引言
老年人更易因为年老体衰导致行走功能退化,且现在下肢残障患者的数量也不在少数,他们更需要对应的下肢训练来维持身体机能[1]。不同的患者一般需要不同程度的主、被训练来完成康复训练过程,但现在传统的人工技术或者是简单的医疗设备已经无法解决患者和老人们的康复训练和健康需求,根据这一情况,文章设计了一种以恢复下肢运动能力为主的外骨骼式下肢康复训练器。
训练器主要由支撑机构、运动平台、力传感器、驱动装置等组成,可以凭借训练器对患者进行下肢肌肉方面的运动恢复,使他们再度站立,达到利用机器代替人工,辅助患者模拟正常人的步伐进行关节、肌肉的活动训练,以达到锻炼下肢肌肉,恢复神经系统对行走功能的控制能力以及走路技能的目的。外骨骼式下肢康复训练器更贴近人体运动规律,舒适感较高,也有较好的训练成效,操作简单,更适合社区和家庭推广使用。
本文对人体下肢的关节结构运动进行动力学分析,根据正常人的行走步态对外骨骼训练器运动模式进行设计,达到更好的训练效果,并基于人机工程学原理对下肢康复训练器部分结构进行设计,满足患者在使用过程中的舒适度。
1 人体行走步态分析和下肢模型建立
步态,是指人体步行时的姿态和行为特征,人体通过髋、膝、踝、足趾的一系列连续活动,使身体沿着一定方向移动的过程[2]。步行周期是在行走时一侧足跟着地到该侧足跟再次着地的一个完整过程。正常人的下肢在步行时位置分为支撑相和摆动相,如图1所示,时长分别占步行周期的60%和40%,根据步行运动发展来说,一个比较完整的人体步态周期应包括包单足支撑相和双足支撑相两个阶段[3]。在单足支撑相时,人体一条腿脚底接触地面承担身体重量,而另一条腿则处于摆动期。在双足支撑相时,双脚着地,由两只脚支撑着身体的重量,包括前脚着地双足支撑和后脚着地双足支撑两个时期。
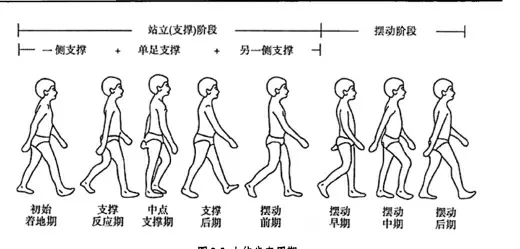
图1 人体步态周期
对下肢运动进行动态分析,发现在整个步行周期中,髋关节屈伸角度逐渐增大,于摆动相中期达到最大角30°,并保持到支撑相开始。后伸角度在足跟离地至足趾离地期达最大角10°~15°。膝关节在周期中出现了两次屈曲和伸展,在摆动相末期下肢伸展进入站立,随即在支撑相早期后小幅屈曲,即膝关节屈曲,并在支撑相中期再度伸展,随后再度屈曲,并在摆动相早期屈曲达到60°,如果这时膝关节屈曲角度受限,会影响小腿向前的摆动,踝关节在足跟着地时保持中立位,足跟离地时跖屈角度约达到20°。髋关节、膝关节、踝关节主要运动特征和运动范围如表1所示。

表1 下肢关节主要运动特征和运动范围
由表1可得知,人类下肢骨骼主要包括三大关节,分别为髋关节、膝关节、踝关节。根据对人体下肢运动特点结合人体骨骼结构的特点,一般来说,知道髋关节具有屈伸、内收外展和内旋外旋三个自由度,踝关节具有屈伸、内收外展和内旋外旋三个自由度、膝关节一个自由度,所以可将人体的下肢运动简化为由髋关节、膝关节、踝关节组成的运动链进行的运动。髋关节可以进行3个方向的旋转运动,可看成为一个球铰。膝关节是连接大、小腿的铰链,只可以进行1个面内的运动。踝关节同样可以进行3个方向的旋转运动,看为一个球铰。大腿、小腿、足部看为3段刚体。
2 外骨骼式下肢康复训练器的设计思路
外骨骼式康复机器最早设计是出于帮助患者进行下肢运动,立足于人体下肢运动的步态分析,在使用上必须与人体进行直接接触,因此外骨骼式下肢康复训练器必须严格遵循人体下肢运动机理。为了不同患者的不同身体结构,还要充分考虑到它的安全性、舒适性等问题[4]。所以在训练器的结构设计上要求有两点:一是不能妨碍人体的正常运动;二是要贴近人体行走的步态,根据人体的结构与形态对机器进行优化。根据有关资料显示,人在走路的时候主要是在矢状面有着比较大的幅度,在额状面和横切面上的运动幅度就比较小,这两个面只起到了保持平衡的作用。所以在设计外骨骼式下肢康复机器人时,只需要在矢状面内运动的自由度处装电动机,在其他面内的运动都可以由人体的力量带动起来。在外骨骼下肢中,把驱动放在髋关节和膝关节上是最好的方法,这样一来就可以让人体在保持平衡的能力上,也很大程度上降低了结构设计和控制的难度。
3 外骨骼式下肢康复训练器的结构
如何设计训练器结构是整个外骨骼训练系统的重心,结构设计的好坏会很大程度上影响训练器主要功能的展现。为了保证机器的正常行动和用户使用的灵活性、限制性,避免不安全因素,并使机器更贴合人体,更具舒适性,在实际设计中必须考虑机身流线的设计,如人体的某些参数、关节的自由度等因素。为了确保外骨骼式下肢康复训练器的舒适性,机器中各个连杆的长度一定要和患者的关节结构保持高度相似。而又因为不同的患者身高腿长都不相同,所以要把机器腰部和腿部的连杆做成可以调节长度的设置。自由度是在保证人体可以进行最基本运动前提下设定,并根据人体行走步态的分析来规划外骨骼式下肢康复训练器的髋、膝、踝关节的旋转角度,使机器可以模拟大部分人体的行走运动功能。
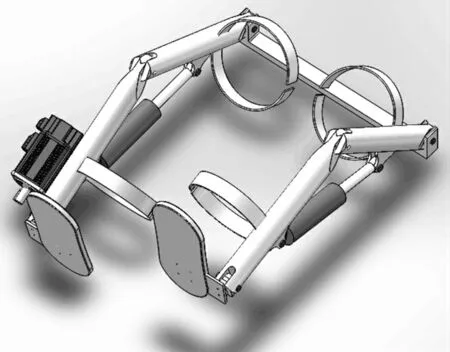
图2 下肢康复训练器三维效果图
外骨骼训练器主要由腰板、大腿、小腿、脚踏板、髋关节、膝关节、踝关节七个主要部件组成,如图2所示。为了满足绝大部分人的需求,大腿和小腿的连杆要做到可以自由调节尺寸。由已知资料可知,我国18岁~60岁男性平均大、小腿长分别为42.55cm、39.52cm;女性平均大、小腿长分别为33.60cm、30.75cm,因此可以确定大腿长和小腿长的尺寸范围。
腰部的结构除了背板,还设计了一块腰部底板在腰部来连接背板和大腿,另外在后面设计一个载物板,可用于盛放重物,并在腰板髋关节处使用了一个销轴和大腿链接,来完成大腿和腰部的自由转动。
根据上文得出的男女性不同的大、小腿尺寸数据,为了满足不同人群的需求,将大腿杆的最左端开一个通孔,方便与腰部底板连接,在中间部分开孔与载物板连接,最右端开槽,尾部有一个圆弧相连接。将小腿左端与大腿圆弧相连接,在中间位置打两个与推杆连接的小孔,推动小腿运动。
脚踏板是下肢外骨骼的重心,人在行走中的负重主要都集中在脚板上,在外骨骼装置中,装置的重量也主要由脚板支撑,所以必须要同时考虑脚板的强度和刚度,同时保证穿戴者的舒适性。因此,脚板应使用橡胶类的柔软材质,使穿戴者的脚掌可以自由弯曲,并在脚后跟处的橡胶板内嵌入一块钢板用来承重,达到预期的功能。为使脚踏板与小腿连接,需要在脚后跟处开槽来连接小腿。
髋关节对整个人体有着支撑作用,在人体运动过程中有3个方向的运动,依据3个运动方向的重要性、安全性,将电机安装在髋关节屈、伸运动的位置,把各个运动形式的限位充分考虑到位,不让零件的扭曲度过高,保证它的安全性。
膝关节在人体下肢所有关节中损伤率较高,设计的过程中需考虑其使用寿命。人体的膝关节只有一个自由度,只有屈伸运动的形式,所以在设计的时候要限制其机械结构,避免使用者在行走过程中产生不便。
踝关节是下肢中最灵活、连接腿部和脚部的重要关节,与髋关节一样有3个方向的运动。在对人的行走步态分析中,正常行走时踝关节在背屈和跖屈运动时表现突出,又因为大多数踝关节损伤主要是在背屈和跖屈上,所以在设计踝关节时只需保持背屈与跖屈运动的一个自由度即可。
4 外骨骼式下肢康复训练器的工作过程和使用方法
在外骨骼下肢康复训练器中,除了腰板等结构,还有电机、销轴、电动推杆等机构。其工作过程为:启动电机后,电机通过牵动推杆等机构带动髋关节外展、内收,前屈、后伸的运动,并带动大腿的运动。又因大腿与小腿有推杆连接,也可以带动小腿的运动。当腿抬起时,穿戴者脚部自然下垂,使踝关节进行一个平面上的运动。
使用外骨骼式下肢康复训练器时,根据不同患者的身高调整好大、小腿杆的长度,再调整训练器的角度,方便使用者穿戴。将束缚带或支撑板等装置固定住人体下肢,与训练器紧密相连,防止出现意外事故。检查没有问题之后,就能启动电机开始进行下肢训练。
5 结论
除了传统的下肢康复器外,外骨骼式下肢康复机器也成为现在最有吸引力的研究之一。外骨骼式机器行业爆发式增长,是发展的热点,关于相关机器的设计也更加智能化、标准化、系列化。本文主要对人体下肢的运动机理、人体正常行走步态、整体的结构设计等方面进行了研究,给出了大致的外骨骼式下肢康复训练器设计方案,主要由腰板、大腿、小腿、脚踏板、髋关节、膝关节、踝关节七个主要部分组成,能够完成髋关节、膝关节和踝关节的外展、内收和前屈、后伸的运动。但因为人体运动的复杂和多变性,所设计的外骨骼式下肢康复器对康复训练效果还有待通过实验进一步考证。
