基于LABVIEW的道路图像信息识别的研究*
2021-03-12张光葳
张光葳
(福建船政交通职业学院,福建 福州 350007)
0 引言
LABVIEW (Laboratory Virtual Instrument Engineering Workbench),是一种虚拟的电子设备工作平台,可用于信号采集、信号处理、算法编程以及图像处理等工作[1]。与传统的虚拟工作平台不同,LABVIEW采用的是一种基于图像化,通过模块组合及算法搭接的计算机编程语言。由于LABVIEW具有十分强大的图像计算和处理能力,在工业控制和自动化生产上得到了十分广泛的应用,因此本文使用LABVIEW对汽车行驶过程中道路的信息识别进行研究。
1 LABVIEW的视觉与运动模块介绍
对于LABVIEW的图像处理技术,需要使用到NI中的视觉与运动模块,在处理过程中,可借用这套模块内部自身的程序算法,对接外置摄像头,实现图像数据的采集和并结合程序自带算法,对图像进行色彩处理,实现数据的采集工作,减少程序设计时间和难度[2]。目前,主要视觉与运动的主要模块包括图像存储、图像加工、图像检测以及图像信号采集等功能。
2 图像预处理
对于外界实时收集的图像情况,由于存在抖动、不稳定以及周边环境干扰等影响,因此图像所表达的信息往往不利于计算机的识别。所以需要对图像进行预先处理,降低噪声、增强几何结构、突显目标结构色彩[3]。另外,为了实现计算机对图像中的目标图形进行数字化读取,还将对处理后的图像进行数字解析,实现图形的数字化,并对数字化后的数据重新进行构造和恢复,实现图形的再现。
2.1 图像采集
在进行图形处理时,需对图像进行网格采样、间隔量化,并对模拟图像进行一定的离散化处理后,才可被计算机进行识别处理。而使用摄像头连接电脑后,可直接获取图像信息,不再需要额外其他电子设备的辅助,已经成为当下图像信号数据采集的主要运用手段。因此,在实际操作中,只需要在LABVIEW程序中,建立图像读取空间、摄像头通信通道、图像数据显示控件及可实现LABVIEW对图像信号的实时采集。使用LABVIEW进行图像采集的程序结构如图1所示。
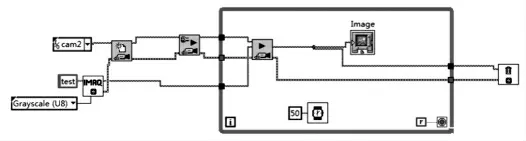
图1 基于LABVIEW的图像采集程序
使用图1的程序,在夜晚道路上使用外置摄像头,所得到图像如图2所示。

图2 外置摄像头所采集图像
2.2 灰度处理
对于彩色图片,由于像素点的变化范围过大,多达一千六百多万个变化范围,因此数据量的处理过于庞大且毫无意义,需对彩色图片进行灰度处理,使其变为偏向黑白的单色图片,以减少图片的数据容积,降低处理难度,减少计算量。
在以往的灰度处理中一般常用的灰度处理策略可分为三种:
2.2.1 加权算法
对于构建成色彩图像的RGB模型,分别对R、G、B赋予不同的系数值,并将三者相加,且确保三者系数之和为1,一般而言,由于人眼对于绿色最为敏感,因此G的系数最高,而对蓝色最不敏感,所以B的系数最低。
2.2.2 平均法
对于构建成色彩图像的RGB模型,直接取R、G、B三个数值之和的平均值。
2.2.3 最大值法
以RGB模型中的最大数值分量作为图像的灰度值。
对于三种方法而言,一般加权算法所呈现出的图像更加细腻,有更强烈的层次感,因此在LABVIEW中使用加权算法对图像进行灰度化。
在LABVIEW软件中,可直接调用视觉助手模块,进行图像灰度调节,经过对于图片环境及周末色彩的对比、对权重参数的不断调整,最终得到的灰度化图像如图3所示。

图3 灰度处理后的画面
2.3 图像二值化
在图像灰度处理后,需进行二值化,其目的是将目标与背景图像分离开,以方便计算机后续的识别工作。

图4 图像的二值化
二值化处理最常使用的是阈值法,其原理是利用目标图像与背景图像之间的阈值差异,选取某个阈值,进而将目标图像和背景图像区别开,进而得到二值化的图像。但是,由于在不同环境下,各类图像所呈现出的图像画面是各不相同,导致阈值存在不同,这也是二值化处理的难点所在。但是,由于正常城市道路的图像色彩大致相同,并不会存在较大的色差,因此,基于这点,可选用LABVIEW中的自适应阈值处理模块,确定道路的大致阈值,将道路与其他不相关背景分离出来即可,其图像如图4所示。
2.4 图像分割
二值化后的图像,由于背景中存在类似道路阈值的图像,如车牌、路灯、反光带等,因此会产生比较大的干扰,所以需要对这类图像再进行分割进行处理。
对于图像的分割处理,由于道路情况的变化复杂,无法使用定向区域分割的方法,而确定边沿的方法则由于道路实际的不确定性,并无法事先确定道路边沿,也无法使用。基于道路这种不可预判和不确定性,但目标区域又相对较大且确定性的情况,可使用区域生长法进行分割。其原理是从单点开始,可与周边和其像素相近的点或区域进行结合,形成新的点或面,并不断延续下去,最终直至无法扩增为止,基于这种策略,即可实现对道路图像的分割处理,最终所得的图像如图5所示。

图5 图像分割
3 图像边界提取
在对图像进行分割后,即可对图像进行边界提取,以确定道路的边界情况。因此可调用LABVIEW软件中的边界提取模块,通过提取后可得最终的道路识别情况,以5*5结构元素选取则结果如图6的圈内线段所示。

图6 边界提取
4 总结
由LABVIEW软件所处理得到的图像可知,即使在夜晚复杂条件下,LABVIEW依然可以对道路图像进行处理,并提取到道路信息。对所提取道路信号再进行后续处理后,可在今后应用于车辆行驶时的道路宽度判断,以及边界极限的确认,从而保证车辆的安全通过性,同时可以判断在交会车条件下,两车的通过性,因此在车辆安全行驶方面具有十分广阔的研究前景和应用价值。
