基于机器视觉的电梯钢丝绳缺陷检测系统研究
2021-03-11李文
李 文
(安徽机电职业技术学院,安徽 芜湖 241000)
钢丝绳是电梯承重的关键装置,对于轿厢的上升和下降具有驱动作用。在电梯进行作业期间,钢丝绳主要产生的是包括拉、接触、弯曲在内的三种应力。在长期使用不保养的情况下经常会出现断裂、被油污腐蚀等问题,最终导致电梯安全生产事故的发生。在不能够提前检测并发现的情况下,将造成非常严重的安全生产事故,危及人的生命。目前,在对电梯钢丝绳缺陷视觉检测系统的研究中发现,该系统通过视觉检测的方式能够及时检测钢丝绳的缺陷,并且系统的结构和测量方法简单易操作,能够有效避免事故发生〔1〕。
1 传统钢丝绳监测方法
在电梯投入运行以后,一般使用目测的方法对钢丝绳进行观察,发现有明显的地方直接进行判断,如是细微的瑕疵,则必须要使用检修速度并使用放大镜来进行辅助判定。而人工无法长时间高效率的进行检测,时间一长就会不可避免的产生疲劳,进而影响判断的准确性。另外,受人眼视觉的影响,对一些细小的问题很难检出,这就造成很多电梯钢丝绳直到发生断绳的严重事故都无法及时发现。
从目前看,能够用于检测电梯曳引钢丝绳的技术,通常选择弱磁感应技术,它是将永磁类仪器和漏磁类仪器结合起来构成的一种检测技术〔2〕。
这种检测技术的工作原理是通过磁场对钢丝绳的轴向部分进行磁化,检测过程中,钢丝绳穿过该磁场,如存在缺陷,则会发生漏磁场现象或者出现磁通量变化,然后通过磁敏感元件,就能够检测出这一变化,从而可判断出钢丝绳的缺陷状况。科学家根据钢丝绳自身的特点及常见的缺陷状况,找到两种检测方法:(1)Localized Fault Method(简称LF法);(2)截面积损耗型检测法(Loss of Metallical Area Method)(简称LMA法)。前者主要是从钢丝绳表面存在的缺陷来获得漏磁场的具体信息,一般可以判断出钢丝绳的断丝、斑点以及锈蚀等问题;后者主要是通过磁通量的变化来得到相关信息,从而判断钢丝绳存在的磨损、锈蚀等问题。这种磁检测方法,通常有两个部分构成,一是由经过磁化钢丝绳的励磁装置构成;二是由检测磁场的磁检测装置构成。励磁装置的主要作用是磁化钢丝绳,其磁化程度将决定是否检测出存在的缺陷,同时也决定了探伤传感器的体积和重量,当前国外已经将钢丝绳进行深度磁化。磁检测装置则是关系到缺陷的位置、缺陷程度、信噪比等。其中LF法,通过感应线圈和霍尔元件以及其他元件共同构成的一种检测方法,同时还融合了磁整板技术以及聚磁技术,因此大大提高了检测的准确性、灵敏度;在LMA方法当中,则是通过布置检测元件的位置,从而提升检测的准确性和灵敏度,提高对于缺陷定性和定量的分辨能力。
通过磁敏感元件,从而能够检测到漏磁场。对于磁敏感元件来说,其输出的电势随着线圈和被检测对象之间的相对移动,从而不断进行变化,磁敏感元件就可以检测出磁通量的变化量;而选择的霍尔元件并不受到检测速度的影响,所以能大幅度提升检测的灵敏度、可靠度等。
但上述几种方法都受到客观条件的制约,比较容易受到干扰,差错率较高,由于需要人工参与到检测工作中,一方面增加了检测成本,另一方面降低了检测的准确性。
2 基于机器视觉的钢丝绳监测方法
机器视觉技术构建的钢丝绳检测系统,就是运用视觉技术,能够进行360°捕捉钢丝绳,从而判断钢丝绳的受损状况,然后将数据发送到后台模式识别技术,从而分析出受损状况,并实时显示受损状况〔3〕。
2.1 机器视觉与应用
该系统是运用成像系统,模拟人类的视觉器官,从而获取相关数据,然后通过计算机来对数据进行处理和系统,其终极目标是通过视觉观测,自主做出对事物判断的能力〔4〕。
工业机器视觉应用系统包括: 视觉传感器、高速图像采集系统、专用图形处理系统和计算机等。该系统通过视觉传感器捕捉到的信号,通过模数转化器转化为数字信号,然后再将信号传输给专用图形处理系统,对其进行处理之后,再通过计算机对信号进行处理,将结果显示在显示屏当中,具体系统如图 1 所示。
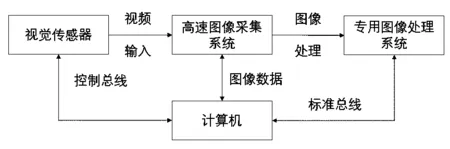
图1 工业机器视觉应用系统图
本文主要采用光源和相机进行图像采集,将图像上传至主机,主机进行图像识别后判定钢丝绳是否有损伤,如果有则进行声光报警。
2.2 硬件电路设计
在使用智能视觉技术基础上的电梯钢丝绳断丝、断股缺陷检测系统,主要是运用了在线、非接触测量的方式,为了避免在人工检验过程中因工作人员的专业性、责任心或其他干扰因素造成的漏检现象,从而能够高效地检验电梯钢丝绳安全隐患。可根据检测结果报告和检测中形成的图像证据进一步明确钢丝绳检验责任。系统主控电路如图2所示。

图2 主控电路
该检测系统集成了各种资源,例如相机、微处理器、A/D、I/O、存储器、图像处理软件、模式识别软件等,此外还采用了高端光电仪器以及进行视觉数据采集、处理的设备,该系统能够快速将数据进行数字化、高清化,同时该系统高度集成了各类设备,因此能够处理复杂的问题〔5〕。
2.3 视觉设计
基于机器视觉的电梯钢丝绳检测系统,其具有两大优点:一个是速度快,二是智能化。电梯运行的全过程可以通过检查速度来实现(它可以以额定速度运行低速电梯)。通过摄像机对于钢丝绳进行实时观察,基于计算机的计算,使用机器操作而不是人为地理解客观世界,以实现一组特定目标。具体说是通过CCD镜头捕捉钢丝绳的图像,然后通过DSP芯片对于图像进行处理,然后将其转换成数字信号。数据传输模块用于将相关数据输入计算机,并通过专门设置的操作方法提取图像预处理和图像。特征,模式识别方法可以识别和分类分割的单元,然后分析和理解电梯钢丝图像〔6〕。
该检测系统在图像处理和缺陷识别过程中,可以分析钢丝绳的缺陷,缺陷部位,特定的图像显示,通过非接触式、实时检测的方式,从而自动获取钢丝绳的图像数据。电梯钢丝绳缺陷,形成录像证据,符合安全生产检查规定的要求,从根本上解决了人为因素造成钢丝绳缺陷缺失的问题〔7〕。
2.4 软件设计
鉴于高清摄像头系统处理能力较弱,可用空间不足以保证智能分析算法的正常运行,而前端摄像头获取视频码流后需要依靠系统进行后期处理,一般是通过后台计算机或者是嵌入式系统来对数据进行处理,智能视觉监测系统则是通过CCD摄像机获取相关图像的模拟信号,然后将该信号转换为数字信号,利用可编程门阵列,将信号传输给CCD传感器,然后将信号转换为模拟信号,再将其转换为YUV信号并进行传输。对于高端DSP处理器,处理器在获取视频图像信息后,可以进行适当的智能分析算法来获取图像,利用图像当中的直方图信息,从而得到钢丝绳的基本轮廓,系统能够自动根据实际状况选择灰度,同时确定CCD的阈值,将钢丝绳与背景图像进行对比,经过计算后,获得完整的钢丝绳图像。通过适当的滤波,可以将图像噪声降至最低,从而确定后续缺陷。对图像进行锐化和过滤之后,提高钢丝绳的纹理效果,从而能够检测钢丝绳的边缘处,有利于系统进一步处理。通过对图像进行预处理后,利用面积以及横截面像素的变化等特点,获得钢丝绳缺陷部分的数据。然后用模式识别的方法进行区分和辨别,提供对缺陷进行检测的结果、检测截取的图像、缺陷所属的部位,最后由系统提供相应的检测统计数据。具体流程图如图3所示。
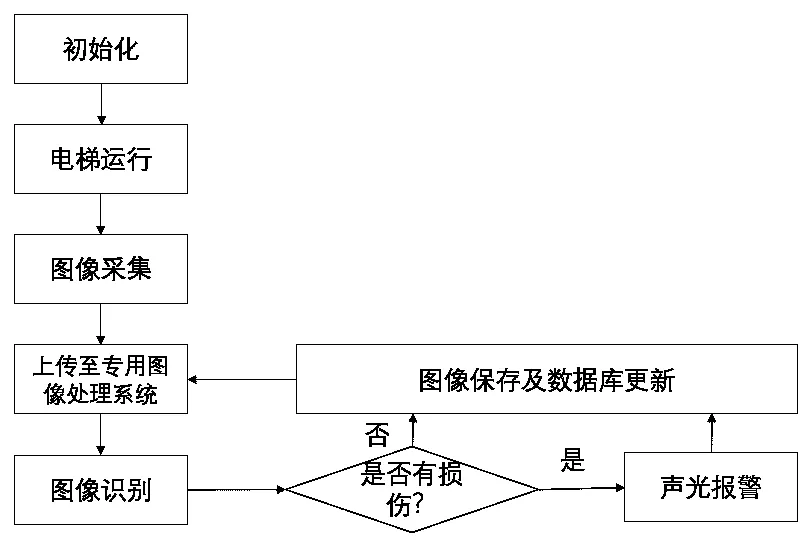
图3 软件流程图
3 实验
通过机器视觉检测系统,采集到钢丝绳的具体图像,对其进行检测实验,测试图像如图4所示。

图4 钢丝绳采集与处理
为了能够使用更加全面的实验来证明检测系统在钢丝绳采集与处理过程中的优势,实验将分别采用并收集持续作业的10 000 张电梯图像进行检测。我们通过点特征、方向特征以及亮暗特征以及上述三种特征的融合特征进行计算,通过下列公式进行分析:
(1)
(2)
(3)
Df=λ1Dp+λ2Dd+λ3Dv
(4)
进行运算获得图像相似度,利用不确定性推理的原理对采集到的10 000 万张图像进行分析,系统显示存在缺陷的图像共 23 张,通过对图像进行具体查验后,确定缺陷总数为20处,具体通过表1来进行分析。

表1 检测数据表
检测准确率=正确检测图像数量/采集图像总数=(10 000-(23-20))/10 000=99.97%
缺陷检出率=检出的缺陷图像数量/实际缺陷图像=20/20=100%
缺陷判定率=正确判定缺陷数量/判定为缺陷的图像数量=20/23=87.00%
通过上述数据证明,本文所采用的钢丝绳缺陷视觉检测具有较高的准确性。
4 结语
从实验的结果可以得出结论,检测系统还存在检测失误的情况。造成这一现象一是因为在使用过程中,钢丝绳因磨损和油污程度不同,导致反射的光线存在差异性,相同程度的补光下图像部分的纹理可能明显一些,另一部分图像纹理相对要暗一些,由于这些缺陷之间差异性较小,通过视觉很难检测出来。二是本系统主要是在对电梯正常使用不造成影响的情况下进行的实时检测,因此对检测速度方面要求相对要快,导致特征提取阶跃变化较弱的信息不充分,从而影响了细微部位的检查测试效果。
通过摄像机器对钢绳缺陷的细节进行恰当的曝光,并充分考虑到钢丝绳磨损程度对系统检测结果的影响,就可以通过视觉检测系统将钢丝绳存在的缺陷快速找到并判定。在之后的一段时期将继续进行专题研究,以期能够提高电梯钢绳缺陷整体的检测性能。
