水声通信网络信道建模与仿真研究进展
2021-03-07张育芝张效民王安义孙彦景
张育芝, 张效民, 王安义, 孙彦景, 王 斌, 刘 洋
(1.西安科技大学通信与信息工程学院, 西安 710054; 2.西北工业大学航海工程学院, 西安 710072;3.中国矿业大学信息与控制工程学院, 徐州 221116)
随着信息化、数字化、智能化的时代发展,人类对信息和资源的需求也从陆地向海洋扩展,经略海洋成为各国的战略目标。水声通信网络在国防安全、资源开发、环境保护等领域有巨大的发展潜力。例如,蛟龙号载人潜水器最深下潜深度7 000 m,与母船之间的通信依赖于水声技术;在海洋981石油钻井平台,中国自主研发的监测系统[1-2]可将水下设备信息和海洋环境信息通过水声链路实时传输到钻井平台;越来越多的水声通信与网络成功应用,必将为海洋信息化提供有力的技术支撑[3]。
水声通信网络以声波为载体。海洋中的有线通信以水密电缆或光缆为载体,造价昂贵、维护困难、无法移动,适合在局部范围布放。大范围的海洋信息传输需要通过无线的方式,电磁波和光波在海水介质中衰减严重,声波是目前唯一适合于在海洋中进行中远程距离信息传输的载体[4-5]。
陆上无线信道及其通信网络的研究日益成熟,而水声领域还面临很大挑战。水下实验布放不便、耗费巨大,因此,基于合理的水声信道模型和网络模型对相关算法和协议进行仿真与完善,使得理论设计能在实际实验中有效工作,是水声通信网络理论研究和系统实验的基础。由于水声信道的复杂性和随机性,很难总结出信道响应所具有的统计特性;相对于无线电磁波的信道模型而言,水声信道尚未有公认、标准的水下信道模型。
针对水声通信网络的应用,首先系统研究水声传播特性,并探讨水声传播特性对于通信和组网的影响及设计思路,然后从信道建模和网络仿真两个方面综述最新研究进展,最后展望水声通信网络信道建模和仿真研究的未来发展方向。
1 水声信道传播特性
水声信道特性与无线电信道迥异,在通信领域,水声信道是非常具有挑战的通信介质信道。相对于陆上无线电信道,水声信道具有一系列特殊性:声波低速传播造成传播时延长,并使得多径时延和多普勒效应高于无线电通信几个数量级;水声信道传播损失与频率和距离的关联性、海洋环境噪声与频率的关联性共同造成水声信道载波频率低、可用带宽窄、分数带宽大;同时,海洋环境的时-空-频变特性使得水声信道变化非常复杂[4-5]。水声通信与无线电4G(Generation)通信的信道特性对比如表1所示。

表1 水声和无线电通信信道特性对比Table 1 Characteristics comparison of underwater acoustic channel and radio channel
1.1 低声速与多径多普勒效应
海洋中的声速传播速度低是多径多普勒效应数量级较为显著的根本原因,并且声速的非均匀分布还造成声线的弯曲和能量的损失。
1.1.1 非均匀低声速
海洋中的声速具有一定的垂直分布特性,影响因素中,温度的变化对声速影响最大,海洋声速随温度的增加而增加,而温度分布极不稳定;深度影响压力,增加时声速增加;盐度增加时声速增加,通常除特殊海区外盐度变化不大。在临近海面的浅水层,温度与深度成反比,压力与深度成正比,这两个相反的变化趋势使得水面以下几百米的深度声速变化迥异。在深海中,海水温度基本恒定,则声速主要受压力影响,与海水深度成正比增加。
声速呈垂直非均匀分布,与温度(T)、盐度(S)、深度(H)成正比。理论推算不可行,可通过经验公式计算,如式(1)所示。典型的深海声速分布如图1所示。
c=1 449.2+4.6T-0.055T2+0.000 29T3+
(1.34-0.01T)(S-35)+0.016H
(1)

图1 深海声速分布Fig.1 Acoustic speed distribution in deep sea
在对声速不敏感的系统中,可取近似值1 500 m/s;在一些需要准确声速的系统中,如需要通过声速和传播时间来精确定位时[6-8],必须测定声速分布以准确地估计位置。
1.1.2 多径效应
海洋中的多径效应主要由海底和海面反射、分层介质折射、海水内部结构等因素引起。
浅海信道声速变化不大,在仿真中常常假设为均匀声速信道,几乎任何两点之间都存在直达声、海面和海底界面反射声:在近距离,往往有比较明显的直达径,加之界面反射损失较小,多径现象非常显著,如图2(a)所示;在远距离,多次反射使声能损失较大,直达声已经十分微弱,所以到达的声波多为小掠射角的多径。
在深海区域,声速随不同深度而变化,且声线向声速小的方向弯曲。深海声速剖面在一定深度存在最小值,称为声道轴;当声源位于声道轴附近,在声道轴上下传播的声线都会弯曲并围绕声道轴传播,如图2(b)所示,声线能量保持在声道中,声信号可以沿着声道轴传得很远,利用这一特性可进行超远程水声通信。

图2 浅海和深海多径效应Fig.2 Multi-path effect in shallow and deep sea
图3(a)采用射线模型BELLHOP仿真软件对浅海均匀声速条件下的声线传播进行了仿真,可见明显的海面和海底反射。
浅海常见的声速变化信道有两种情况:一是在负梯度浅海,近距离上主要包括直达和反射多径。二是在正梯度浅海,存在表面声信道,多径主要由经过海面多次反射的声线组成。
图3(b)采用射线模型BELLHOP仿真软件对深海非均匀声速条件下的声线传播进行仿真,不同颜色曲线用于不同声线的区分。可见,声线围绕深度大约1 250 m(声速最小值深度)的声道轴传播。
深海中还存在汇聚区与声影区。从图3(b)可见,声线密集处为汇聚区,声线稀疏甚至完全没有声线到达的区域为声影区。在通信节点布放时应避免声影区。

图3 浅海和深海声线传播Fig.3 Propagation of sound ray in shallow and deep sea
与无线电通信不同的是,水声通信系统有时并没有视距(line of sight, LOS)的直达路径存在,如浅海表面声道和深海声道轴传播。同时,由于声速非均匀,传播路径短的信号不一定速度快,因而不一定是第一条接收路径的强度最大。因此,区别于LOS或直达路径的概念,在水声通信中主达路径为接收多径中强度最大的一条路径。
海洋水声信道的多径效应,本质上是多条本征声线的集合,本征声线的特征参数决定了多径信道的系统函数。低声速和海洋边界的共同作用使得水声信道多径时延非常大,通常在毫秒级,具有稀疏性[9-12]的特点,还往往呈现出多径簇[13]聚集的特性。
1.1.3 多普勒效应显著
声波在海水中的低速传播使得水声信道的多普勒效应非常显著。多普勒频移(fd)与多普勒因子a=v/c和载波频率fc成正比,其中,v为收发端的相对速度,fd表达式为
(2)
例如,一般商船速度以10 m/s(36 km/h)移动时的多普勒因子为6.7×10-3,比无线电通信中汽车以20 m/s(72 km/h)移动时的多普勒因子6.7×10-8高5个数量级。同时,即使水下设备本身不运动,海水介质的运动会引起设备位移,水声通信的多普勒频移总是不可避免的。
水下航行器移动引起的多普勒频移可以直接计算;海面波浪和海水湍流引起的多普勒频移,可看成不断向前推进的正弦曲线进行计算;实际中,海水运动引起的多普勒频移基本与海况等级成正比例关系,还与接收机入射角度有关。
多普勒因子与波速密切相关。水中的非均匀声速,使得声传播路径的多普勒因子不尽相同,给接收端信号恢复带来很大挑战。水声通信的非均匀多普勒估计和补偿[14-17]在通信物理层得到了重点关注和研究。多普勒估计值还可以辅助水声时间同步与定位[18]。
1.2 传播损失、噪声与带宽受限
1.2.1 频率依赖的传播损失
水声传播的一个显著特点是能量衰减不仅取决于传播距离,而且依赖于载波频率。海水中的传播损失主要包括扩展损失和吸收损失,此外还有边界损失。扩展损失是由于声波阵面在传播过程中不断扩展而引起的声强衰减(几何衰减)。吸收损失是由于介质黏滞、热传导以及其他弛豫过程引起的声强衰减,同时也包括海洋介质中的悬浮物引起的散射。
不同传播距离和载波频率条件下的传播损失显示:扩展损失只与距离有关;而吸收损失不但与距离有关,而且与频率有关(吸收系数与频率成正比),传播损失的计算公式为
TL=10lg[A(d,f)]=10lg{dk[α(f)]d}=
k10lgd+d10[lgα(f)]
(3)
式(3)中:TL为传播损失;k10lgd为扩展损失,其中,d为距离,(单位:m),球面扩展k=2,柱面扩展k=1,未知可取k=1.5;d10[lgα(f)]为吸收损失,吸收系数(α)用Thorp公式计算,工程可用近似计算公式α(f)=0.036f3/2, dB/km,其中f的单位为kHz,d的单位为km。
在一定通信距离下,总的传播损失随着频率增加而迅速增大,如图4所示。特别是在较大通信距离时,传播损失随频率增大而显著增加,因而极大地限制了远程水声通信可用的载波频率。这种关系在系统设计中影响水声通信系统工作距离与载波频率的选择[5]。
1.2.2 频率依赖的海洋噪声
水下环境噪声是水声通信主要的背景干扰,其成因复杂、种类多变,与海域位置、气象条件及载波频率等都有关系,可以分为海洋环境噪声和外部干扰。
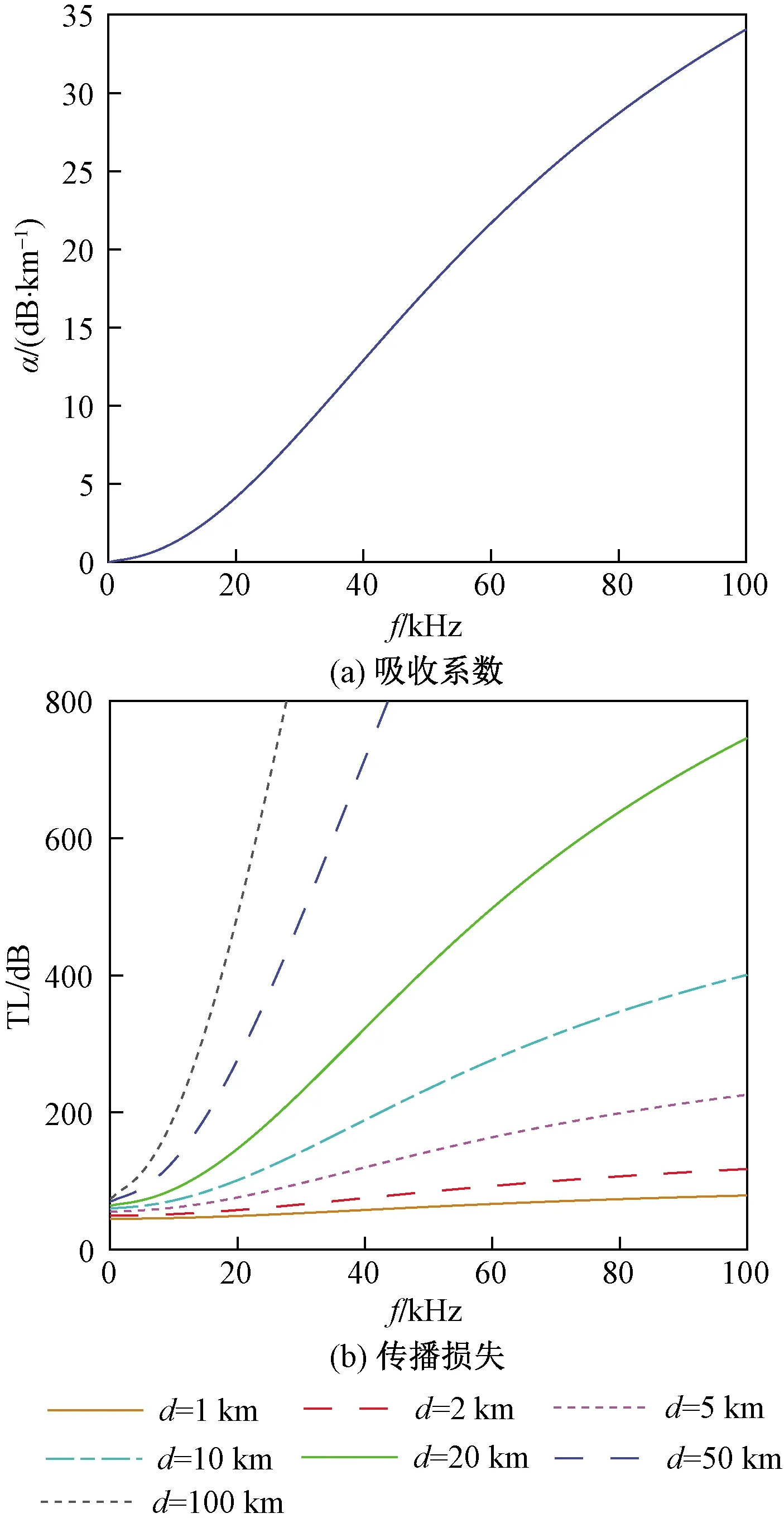
图4 传播损失Fig.4 Transmission loss
海洋环境噪声常出现在安静的深海背景中,主要由湍流、航运、波浪、和热噪声组成,这些噪声通常被认为是有色高斯噪声,可通过图5所示的Wenz噪声谱经验曲线计算,图中NL为背景噪声级Wenz噪声经验谱曲线包括湍流噪声(Nt)、航运噪声(Ns)、波浪噪声(Nw)、热噪声(Nth)之和,以dB为单位可表示为式(4),其中频率f单位为kHz,s为航运密度(取值0~1),w为海面风速,总噪声谱密度为各项之和。
(4)

图5 Wenz海洋噪声谱Fig.5 Wenz noise spectrum
外部干扰是一种可识别的噪声,只存在某些特定的环境中,如冰川破裂、海底地震运动、鱼虾群活动、通信设备的机械噪声等,一般有很明显的非高斯成分。
噪声谱级具有高度频率依赖性,噪声功率谱密度随频率的增加而下降,影响着通信系统功率、频率等发送参数的设计。选择合适的通信频率和带宽时不仅要考虑频率依赖的路径损失,还需考虑频率依赖的噪声。
1.2.3 最优工作频率与带宽受限
水声通信中,传播损失A随着工作频率的提高而增大,噪声N却随着工作频率的提高下降,使得接收信噪比(signal to noise ratio, SNR)在一定带宽内是有极值的。在水声通信网络中,若要在一定的距离上进行通信,信号发送功率S一定时,则窄带SNR是工作频率的函数,可表示为
(5)
可见,对于一定距离的通信,在某一频率上存在接收信噪比极大值,此时fopt为最优工作频率[19]。最优载频近似经验计算公式为
(6)
根据图6分析3 dB系统带宽,可得超远程水声通信(100~1 000 km)可用带宽小于1 kHz;远程水声通信(10~100 km) 可用带宽只有几kHz;中程水声通信(1~10 km) 可用带宽约十几kHz;近程水声通信(0.1~1 km) 可用带宽约几十kHz;超近程水声通信(小于0.1 km) 可用带宽大于100 kHz。
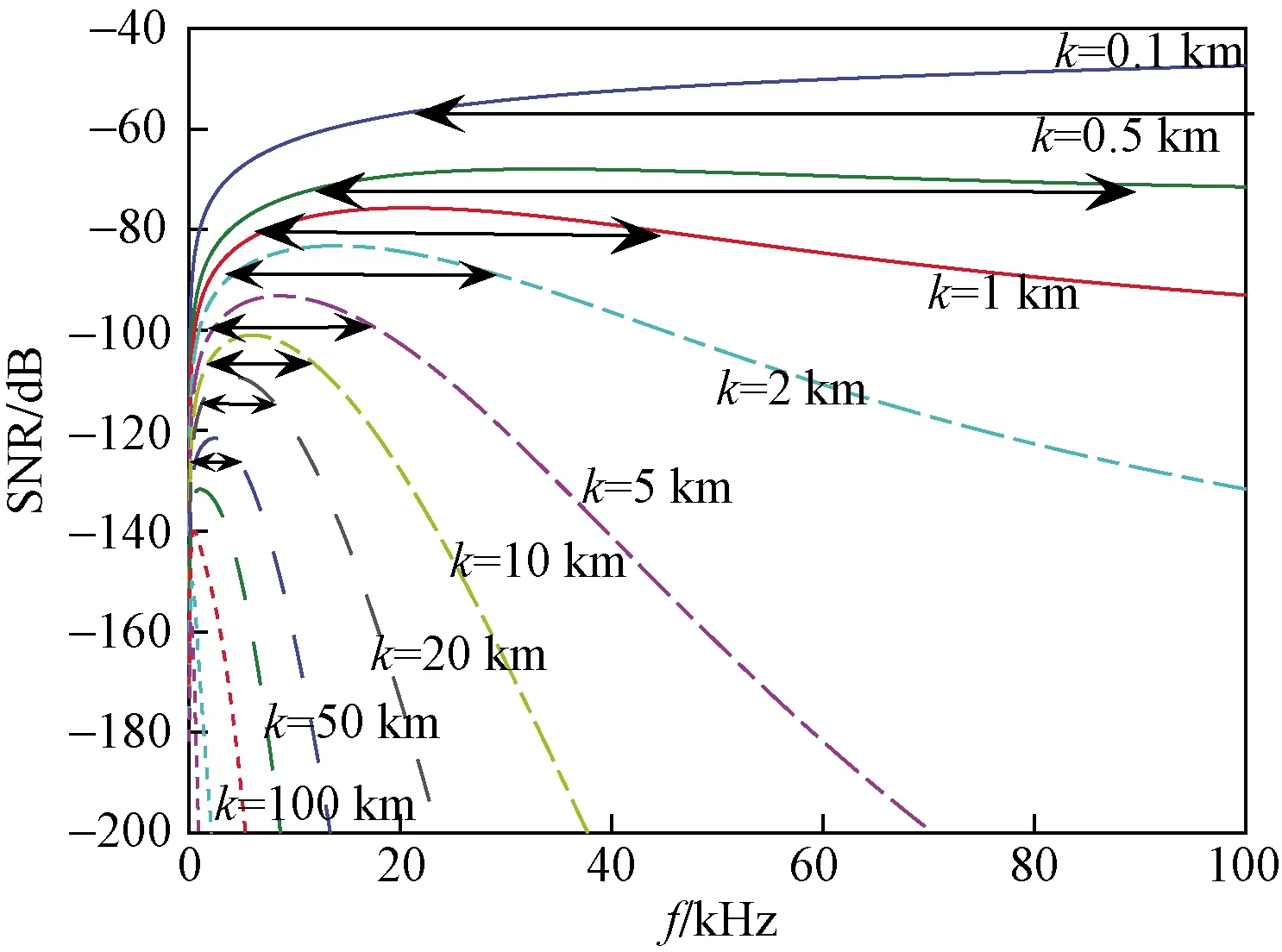
图6 水声通信最优载频Fig.6 Optimal carrier frequency for underwater acoustic communication
1.3 时-空-频变特性
水声信道是时-空-频变的,其变化特征与海洋介质的各种不同时间、空间尺度的运动状态有关,且与频率密切相关。
1.3.1 时变性
从时间尺度上而言,水声信道变化包括:季节尺度变化的声速剖面、混合层厚度等;数天至数月的天气尺度变化的涡、峰;数分钟至数小时变化的内波;数秒变化的风浪;数毫秒至数秒变化的湍流等。此外,除了水声介质变化,通信节点的相对运动往往也是随着时间变化。图7采用BELLHOP水声信道仿真软件,对浅海环境水深100 m、风力2级、收发节点位置固定(水下20 m,会随海水漂移)、中心载频15 kHz、通信距离1 500 m的信道冲激响应进行仿真,可见,多径时延和幅度有一定变化。图8为文献[13]中对美国麻省理工学院的海洋实测数据的分析结果,可见信道冲激响应比仿真的时变特性更为剧烈。
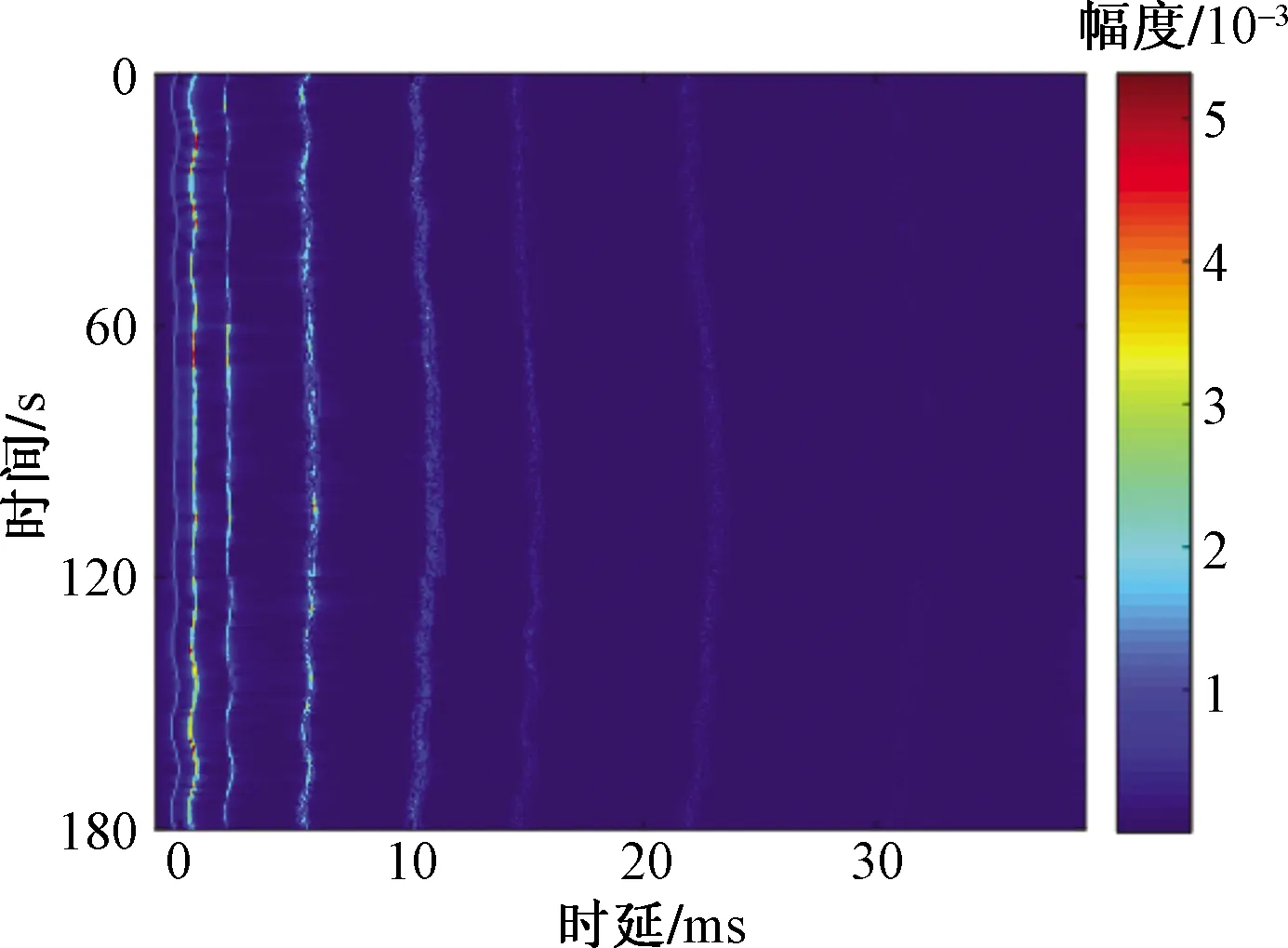
图7 时变多径水声信道仿真Fig.7 Simulation of time-varying multi-path UWA channel

图8 时变多径水声信道实测结果Fig.8 Experimental results of time-varying multi-path UWA channel
1.3.2 空变性
包括因地而变的水深、声速分布、不平整的海底特性与地形;空间随机分散的非均匀体:浮游生物、气泡等。因此,声学声场结构等因地而变,多径结构的空间变化随着布放位置的不同而各异,深海通信中还存在声影区等特殊位置。
1.3.3 频变性
水声信道的一些特性依赖于频率,对于不同的频率,声传播有着不同的衰减、噪声等,产生严重的此起彼伏的谱特性。
同时,水声信道表现出极强的复杂性和随机性,其时-空-频变化是交叉存在的,在系统设计中考虑水声通信网络的稳健性非常必要。
2 水声信道特性对通信网络的影响
2.1 传播时延
低声速导致水声信号传播有很大的时间延迟,影响水声通信网络吞吐量[20],并带来特殊影响。
2.1.1 自适应水声通信
在自适应水声通信中,需要获取信道状态信息进行发送参数优化。由于水声信道的收发非对称性,发送端需要通过接收端的反馈获得信道状态信息。通过水声链路进行信息反馈,传播时延非常大,在此时间内信道状态很可能发生变化,造成反馈信道状态信息与实际发送时刻信道状态信息的失配。
基于信道大尺度衰减或慢变的自适应系统中,可采用信道反馈或统计均值等作为信道状态依据。基于信道小尺度衰落的快变自适应系统中,需获取准确的信道状态信息。Radosevic等[21]和Zhang等[22]分别研究了自适应OFDM调制和多用户OFDM载波分配和调制,显示出自适应通信的优越性;王安义等[23]、Qiao等[24]也对自适应通信进行了仿真和实验研究。近年来,美国一些学者利用机器学习的思想对信道状态进行学习和预测以作自适应传输[25-26],是对海洋通信智能化发展的探索性研究。
2.1.2 水声网络同步和定位
水声网络同步中,水声传播时延长、同一链路往返传播时延不同、不同链路往返时延差等因素严重影响同步性能,无线电网络的时间同步算法不适合水声网络。已有研究成果着重考虑了传播时延长的问题,同时估计频率偏移和相位偏差以提高同步精度[27];然而,在同步过程中依赖大量收发交互会造成信道带宽和节点能量的消耗;同时,时变的往返时延差和空变的链路时延差仍没有解决。
水声网络定位中,声速的非均匀传播,加剧了精确距离测量的难度。基于测距的定位方法,如TOA(time of arrival),需要通过预先测量声速剖面来补偿声线弯曲。此外,信标辅助定位方法、动态参考节点辅助定位方法[28]具有很大发展潜力。对目标的移动性进行运动预测[29],进行联合同步和定位[30-32]等方法可以提高定位精度。
2.1.3 水声网络多址接入协议
水下长传播时延加剧了网络接入延迟和多址接入冲突。如在载波侦听多址接入协议中,当侦听到链路空闲时进行接入;但在水声网络中,在某时刻没有侦听到信息,并不能保证链路在数据接入时刻是空闲的(可能有数据正在传输中但由于传输时延尚未到达侦听节点),时延引起了额外的隐藏终端问题。Zhou等[33]提出了水声多信道三重隐藏终端问题,并利用协作节点降低接入冲突。
长延迟在特殊场景下也能提升系统性能。例如,ALOHA协议中,两个节点同时向一个目的节点发送数据会发生冲突;而在水声网络传播时延大,当两个通信链路上的传播时延差大于数据包长度时,则无冲突发生。有些研究者基于长时延规律通过在指定时间发送数据以达到在接收端无冲突接收的效果,提高了单位时间的网络吞吐量[34]。水声网络协议中的延迟感知协议[35-37]和延迟容忍协议[38-39]利用长时延特性提高了网络性能。
2.2 多径
水声信道多径时延差大,使得信号接收不仅取决于SNR也和多径密切相关。多径引起的码间串扰造成高通信误码率,在多径严重的条件下持续提高发送功率也无法再提高系统性能。通过信道估计和均衡可以对多径信道进行补偿降低误码;同时,SNR作为信道衡量指标并不完全准确,Wan等[40]提出ESNR(effective SNR)作为自适应调制编码通信的工作模式切换依据。
无论时延扩展和多普勒扩展多大,水声信道的多径都趋于稀疏,且能量集中在本征路径上,如图7、图8所示。多径稀疏性是通信系统设计中常常关注的一个关键特性,针对性的水声稀疏信道估计及其水声通信[9-11]与信号检测[12]可以有针对性地提高水声系统性能。
传统通信中的均衡是补偿和克服多径干扰的影响,而时间反转技术可以利用多径信号进行聚焦,提高信号检测和通信性能。同时,在水声网络中,由于空变特性,不同空间上多节点往往具有差异性的多径结构,接收端利用不同多径对信号进行时间反转聚焦,可区分多路信号,从而实现多址接入[41]。
2.3 带宽和能量受限
水声通信网络可用带宽严重受限,传输距离越远则可用带宽越窄。对于远程水声通信,为了减少传播损失和噪声,工作频率一般向低频拓展。对于多节点通信网络,可以采用多跳方式把远程传输转为多个近程传输,提高单跳的传输速率;认知水声网络[42]基于信道特性自适应地选择各节点工作频带,可以充分利用有限带宽资源。同时,水声通信系统带宽一般与工作频率在同一数量级,窄带假设不再适用[43],信号处理与系统设计中应充分考虑系统宽带特性。
水声通信网络能量严重受限,电池供电方式限制了节点和网络的生存期。水声通信发射端功率(几十瓦)消耗远大于接收端(mW级),一般水声系统都采用睡眠模式设计。一种节能的方法是自适应通信,通过动态调整发送功率、调制星座、编码方式等参数,提高能量和频带有效利用。另一种节能的方法是设计网络协议以减少无效发送、提高网络接入效率,如适当增加帧长度,在一次竞争成功后尽可能地多发送信息到接收端,提高有效吞吐量;采用灵活的差错控制和混合自动重传策略,提高发送成功率、降低重传次数、节约重传能量消耗。
2.4 多变信道
水声信道的多变特性使得理论仿真往往和实际实验性能有较大差距。在研究信号处理问题中,针对特定的因素可以假设信道具有确定性时变特性。从系统设计角度,往往按较差信道状况设计,以保证实验在长时间布放周期内的可靠性。同时,实验中对通信的水深、声速地形等作以基本测量,有助于节点的合理布放。
对于时变特性,在小时间尺度和大时间尺度上具有不同的规律,采用不同的方法进行信道预测;对于空变特性,通信中使用多阵元接收提高接收可靠性,多节点网络中可以利用空间差异进行多址接入;对于频变特性,基于对频谱特性的认知进行优化分配可充分利用水声信道有限带宽,对频谱的管理和优化利用是认知水声网络发展的重要方向。
3 水声信道仿真方法研究
海洋环境的复杂变化特性,导致水声信道的准确建模较为困难,迄今为止尚未有一个公认的标准模型适用于各类水下环境和信道。针对不同的应用,常见的水下信道模型如下。
3.1 经验模型
声呐方程是典型的经验模型,基本原则为:信号级-背景干扰级=检测阈。以dB为单位,则噪声背景下的被动声呐方程可表示为
(SL-TL)-(NL-DI)=SNR
(7)
根据声源级(SL)、传播损失(TL)、背景噪声级(NL)、指向性指数(DI)可计算接收信噪比或检测阈值。已知设备特点和技术指标的条件下,声呐方程可用于对设备参数进行最佳设计。例如,在一定发送功率、背景噪声、检测性能条件下可求得最大允许的传播损失,从而进行最优载频设计。
3.2 水声声场模型
基于声场理论,给定环境参数,三维水下环境的声传播特性可用波动方程来描述:
(8)
式(8)中:(x,y,z)表示水中一个点的三维坐标;2为拉普拉斯算子;p、t和c(x,y,z)分别为水中的声压、时间和声速。找到波动方程的解是一项复杂的任务,根据应用的不同,有典型的方法来描述声场的特性。
3.2.1 射线理论
假设相位的变化比幅度的变化快很多,可将三维声压看作幅度函数和相位函数的乘积,进行求解。该假设适用于高频系统,提供了非常直观的声传播表述,在高频通信系统中得到广泛应用[44]。通常使用BELLHOP射线跟踪程序。
3.2.2 自然震荡理论
假设在水平分层信道中,仅在深度方向有声速变化,该方法提供了波动方程的精确解。常用于时间反转处理和匹配滤波处理。常用的程序为基于Kraken自然震荡模型的Kraken程序。
3.2.3 波数积分法
假定分层信道,并用波数积分计算声场,并使用快速傅里叶变换、快速场分析(fast field program,FFP)得到波动方程的精确数值解。FFP的一个程序实例是OASES(ocean acoustics and seismic exploration synthesis)[45]。
3.2.4 抛物线近似法
仅考虑向前的传播方向,用抛物线方程(parabolic equation,PE)近似式的亥姆霍兹方程式进行数值估计。PE方法依赖距离环境下的声场计算。程序实例为MMPE(Monterey-Miami PE)或RAM(range-dependent acoustic model)模型[45]。
声场模型可以求得精确解析解,但运算较为复杂。美国学者对比了OASES、RAM、BELLHOP和Kraken模型下的声压和传播损失值[45],结果显示OASES在远场、近场和高频、低频都表现最佳;BELLHOP的最大优势在于计算复杂度低、耗时短。射线理论和BELLHOP模型常用于水声中高频通信和网络仿真[46-47]。
3.3 基于本征路径的水声多径信道模型
根据射线声学原理建立的本征路径传播模型在水声信道脉冲响应仿真中得到广泛应用。水声信道的几何结构、反射折射效应及其声学衰减,决定了水声信道脉冲响应中的多径数目、相对时延和强度。在信道测试与建模时,经过多次反射、折射失去大部分能量的路径可以忽略,只选取有限条强度显著的多径作为本征路径,其中强度最大的一条多径为主达路径。一般在试验测定中可设定阈值来选取能量较强的多径。当多径数目Np确定后,衡量水声信道脉冲响应h(τ)的主要参数为路径增益Ap(t)和相对时延τp(t),信道冲激响应可表示为多个路径增益和相对时延不同的单位冲激响应δ之和
(9)
对于宽带水声通信信号,每个子载频的传播损失依赖于频率,频带上损失是不均等的,表示为
(10)
式(10)中:γp(t)表示频率依赖的传播损失、以及
非理想发送端电压响应损失的总和。传播损失可以由理论或者实验得到,实际系统中发送端电压响应可以由实验测得。文献[43]中的实验结果验证了水声信道的宽带特性。
在特定的场景评估一些算法性能时,需要有针对性地评估个别动态因素,这时可设置部分参数为静态或服从已知的统计分布,即假设信道脉冲响应随时间发生确定性变化,服从确定时变模型。表2列出了常用的确定时变水声信道模型,也称准静止信道模型。准静止水声信道模型主要应用于对多径和多普勒补偿有针对性研究的仿真中。
对不同确定时变信道下的水声OFDM通信系统误码率进行仿真,水声OFDM子载波数64,子载波调制方式4QAM,符号速率128 bit/符号,本征路径数为6,保护间隔为8个载波。由图9可见,时变多径信道条件下误码率BER(Bit Error Rate)显著增加,降低水声通信系统性能。

表2 常用的准静止水声信道模型
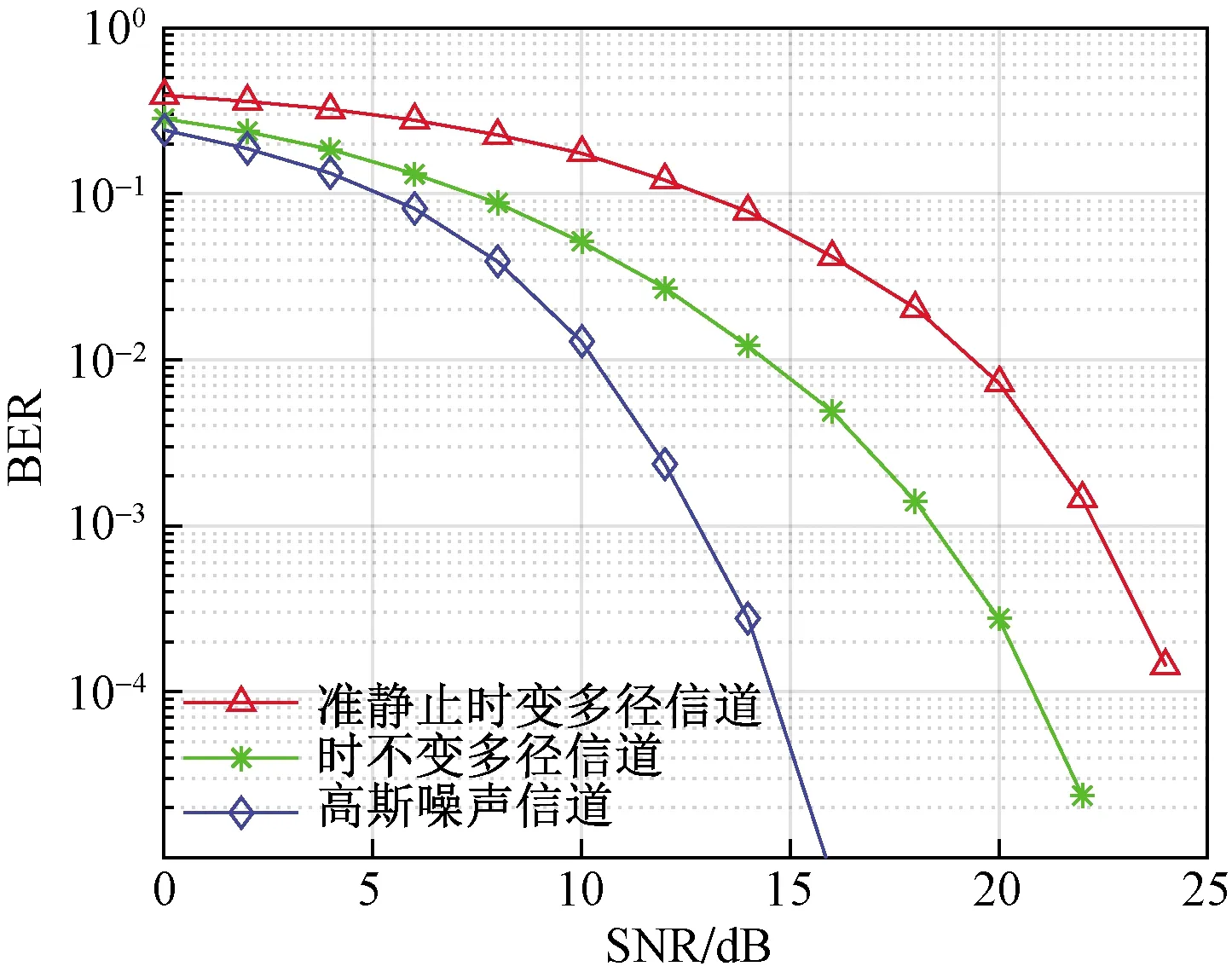
图9 水声OFDM在3种信道模型下的误码率Fig.9 BER of underwater OFDM in three channel model
3.4 基于统计特性的时变水声信道仿真
基于统计特性的时变水声信道模型可以通过随机变化的参数充分描述水声信道的多变,在理论研究的仿真中广泛使用,可以充分衡量特定系统和算法在变化信道中的性能。
3.4.1 改进的瑞利衰落水声信道模型
瑞利衰落信道模型是常用的衰落信道模型,对其进行改进也是水声信道仿真的一种思路。例如,使用Jakes仿真模型,利用瑞利信道的多径延迟向量和功率向量,根据多普勒扩展对信道的时变性进行仿真;再如,为仿真时变多径信道,引入强度起伏参数、不均匀度参数建立时变多径信道模型。
3.4.2 基于本征路径的水声信道模型
Qarabaqi等[47]提出了一种通用的多尺度时变水声信道模型:针对风浪或海水运动导致的节点位置不确定性引起的多径结构变化,引入平均参考径,并通过多径传播距离推导路径损失和相对时延的变化;对于由随机散射和瞬时变化引起的每条多径内的小规模变化,假设散射使得本征路径周围散射子路径形成多径簇,设多径簇内的幅度和时延服从高斯分布,建立小时间尺度的快变信道模型。Henry等[48]研究了由海面风浪和气泡引起的水声信道时变,研究结果显示海面风浪和气泡在低频引起散射和折射,且在中频引起界面损失,提出了IRSIM(impulse response simulator)信道仿真工具,基于射线原理并考虑海面变化,环境参数可随机设置,可用于仿真静止或移动通信中的水声信道。
3.4.3 大规模时变水声信道模型
Sun等[25]研究了水声信道的大规模季节性时变建模和预测问题,建立了隐马尔科夫过程信道模型,提出了一种递归算法对信道进行预测,且可预测信道的周期性变化,浅水实验验证了该模型和算法能够有效模拟衰落统计特性、平均时延、信噪比等参数。
4 水声网络仿真方法研究
水声网络和无线电网络仿真的主要区别在于对基于信道特性的仿真条件和参数的改进。公开发行的网络仿真软件,如NS-2、OPNET、OMNeT++等,其无线信道模型和物理层通信模块并无法直接用于水声通信网络仿真。水声网络的仿真需考虑信道时延、衰减、噪声等物理层实际情况,通过修改或添加水声信道物理层模块,使其适用于水声通信网络。
4.1 基于NS-2/NS-3的水声网络仿真
NS-2是一款基于离散事件分裂模型的开源网络仿真软件,功能扩展性好,支持大规模网络仿真。NS-2使用两种编程语言:C++用来实现网络协议栈的各个模块,面向对象工具命令语言(object tool command language, OTcl) 用来编写仿真脚本和部分模块,进行参数配置;通常每个OTcl对象对应一个C++模块,即分裂模型。NS-2运行输出trace文件形式的仿真结果,可使用相关工具进一步进行分析和可视化图像输出。
NS-3是一个全新的网络仿真软件,并不是NS-2的简单扩展,NS-3采用GPU GPlv2开源协议,其基础模块为内核模块和网络体系模块,内核模块主要用于实现协议和相关环境,网络体系模块主要包括节点模块、网络设备模块等。NS-3可对数据包或事件在仿真过程中的状态进行追踪,最后通过系统提供的接口进行数据采集和可视化输出[49]。
中外有一些水声通信网络仿真软件基于NS-2或NS-3开发,主要成果如下。
4.1.1 美国Aqua-sim
2009年,美国康涅狄格大学水声传感器网络实验室研发出了基于NS-2的水声网络仿真软件Aqua-sim[49-50],加入的水声信道模型能模拟声传播损失和多径效应,在数据包冲突检测模块中加入声传播时延,且具备三维仿真的功能。Aqua-sim能够仿真水声信道衰减和长时延水声通信网络中的数据包碰撞,且提供了一套丰富的基础协议;协议仿真测试后可通过Aqua-net Mate移植到Aqua-net[51]网络平台,连接Aqua-net OFDM Modem进行实验。
随后,在此基础上基于NS-3研发了升级版的Aqua-sim NG(next generation)[52],加入了增强的信道模型包括:多信道模型、噪声模型、传播损失,物理层加入了信号特征包括调制方式和SINR,协议层加入了同步和定位模块、“忙终端”(busy terminal)模型,仿真中更接近真实测试。
4.1.2 意大利DESERT和SUNSET
意大利帕多瓦大学提出的DESERT(design, simulate, emulate and realize test-beds for underwater network protocols)[53]基于其早期开发的NS-Miracle[54]。 NS-Miracle使用C/C++进行模块开发,Tcl/OTcl进行参数设置,支持跨层消息,网络层的多模块并行,更接近实际网络。调用WOSS(world ocean simulation system)进行信道模拟,物理层可连接水声调制解调器,在模拟模式下可通过电脑控制水声调制解调器,在实验模式下,使用WHOI Micro-Modem和EvoLogics S2C进行实验。
在DESERT基础上研发的DESERT v2[55],支持多模式通信,包括低速声通信、高速声通信和光通信模式;连接最新的WOSS系统,包括声速和水深模型,调用BELLHOP计算声线传播以得到信道冲击响应,也可以调用特定的曲线,以模拟收发链路;支持物理层连接NS-3和NS-2/Miracle,可进行时变信道仿真,移动场景仿真;增加了连接MATLAB的接口;增加了HERMES物理层仿真模型,在仿真中能够模拟水声调制解调器特性;具有远程操作功能和日志记录功能;增加时间同步模块,以保证实时调度并更好地支持上层协议。
2012年,意大利罗马大学团队开发了水声网络仿真软件SUNSET(Sapienza University Networking framework for underwater Simulation, Emulation and real-life Testing)[56],可用于仿真、模拟和实测,基于开源的仿真器NS-2及其扩展NS-Miracle,可以直接在水声调制解器或AUV内部加载的Gumstix上直接进行实验。支持以下几种调制解调器:WHOI Micro-Modem,Evoligics Modem和Kongsberg Modem。对DESERT和SUNSET的测试显示,两者在仿真模式下性能接近;在实测模式下,DESERT简单易行,SUNSET使用了更为复杂的额外模块,例如,使用的事件和数据包调度模块能够提高调度准确性,有利于在低功耗的嵌入式系统进行应用。
4.1.3 新加坡Unet Stack
新加坡国立大学的声学研究实验室提出的Unet Stack[57]是基于Unet水声网络项目研发的,物理层参数可通过上层软件定义。其网络仿真协议栈由Agent组成,Agent的作用相当于传统网络中的“层”,但可自由组合不受层与层的连接约束。UnetStack物理层Agent提供了水声调制解调器及其驱动,可连接运行和仿真器相同的代码。仿真器UnetSim中的物理层由仿真Agent替代,提供了仿真信道和实测信道模型。Agent定义了通用的功能和参数等,可扩展、编写脚本、跨层协作,使用Java语言,支持Groovy语言脚本,具有设计、仿真、测试,开发功能快的优点。
4.1.4 中国UANS
哈尔滨工程大学团队提出了一种水声传播模型的水声通信网仿真软件UANS(underwater acoustic network simulator)[58],以C++为开发工具,采用任务驱动和模块化结构,包括仿真参数设置模块、信道模块、调制解调模块、协议模块等,可进行三维拓扑结构编辑。后续还提出了基于NS-2和NS-miracle的网络仿真平台,使用Tcl设置脚本参数,配置模拟节点数量,网络拓扑结构,节点间距离等,用C++实现组网协议;仿真平台采用分层结构,实现了在嵌入式设备上工作,可通过远程控制切换参数配置[59]。
Zeng等[60]提出了基于NS-3的水声网络仿真架构,通过多线程可进行多节点的多数据包并行处理,以“真实水下环境+硬件节点+虚拟协议栈”的模式运作,可直接移植到硬件平台进行实验[61],并使用中科院研制的水声调制解调器进行了验证性实验。在实验应用时,该系统利用设计的NS-3网络仿真器和真实硬件的虚实结合多线程接口,结合水声硬件设备就能直接进行基于硬件节点的水下实验,可以有效的加快水声网络协议真正应用于实际场景。
4.2 基于OPNET的水声网络仿真
OPNET采用分层建模机制,包括节点模型、进程模型、网络模型,分别对应实际中的设备、协议、网络,全面地反映了网络的相关特性。OPNET采用离散事件驱动的仿真机制,事件指的是网络状态,离散是仿真时间是离散的,离散事件驱动可以有效解决通信并发性和先后顺序问题。OPNET包括14个管道阶段(pipeline stage),以仿真网络中发送、接收的过程。OPNET具有可视化的优点,拓扑结构配置方便,提供丰富的模型库资源,三层建模机制能较全面的模拟实际应用。
中国对基于OPNET的水声通信网络研究较多。主要研究成果如下。
(1)管道阶段修正的OPNET水声网络仿真。基于水声信道特点,对无线电OPNET中各个管道阶段的参数进行修正,以更好地模拟水声信道。主要研究成果有:韩晶等[62]提出了基于OPNET的水声通信网络仿真方法,在节点域内建立了通信节点模型,并在管道阶段中(pipeline stages)定义了传播时延阶段(stage 5)、接收功率阶段(stage 7)、背景噪声阶段(stage 8)等三个管道阶段的参数计算;在进程域内对水声网络协议进行了设计;在网络域内建立了一个包含1个主节点与5个传感器节点的水声通信网络。丁元明等[63]和Dao等[64]改进分别改进了OPNET传播时延阶段、接收机功率阶段、背景噪声阶段的参数模型,并分析了水声信道特性对网络协议性能的影响。
(2)引入信道物理层发收参数的OPNET水声网络仿真。针对修改管道阶段参数无法模拟物理层信道衰落、调制方式、接收端处理等问题,学者提出了引入物理层参数的OPNET水声网络仿真,主要研究成果有:Bai等[65]研究了基于OPNET的时变水声网络仿真模型,通过接收功率和误码率来反映信道时变特性:接收功率引入瑞利时变特性,并把BPSK(Binary Phase Shift Keying)在瑞利信道下的SNR-BER(前面出现过)曲线导入误码率管道阶段,以模拟瑞利时变衰落信道下SNR的变化及其对应的误码率,对时变信道仿真有一定启发意义。Zhao等[66]提出了联合BELLHOP和OPNET的仿真,在OPNET中通过MEX接口加入MATLAB引擎调用BELLHOP,发送端通过0-5产生带有传输时延的发送信号,再进入加入的引擎中通过BELLHOP模拟信道传输特性;在接收端,接收信号先送入MATLAB引擎,进行加噪声、解调、均衡等处理,得到误比特率,更加真实地模拟水声信号的物理层处理过程。
(3)建立MATLAB引擎并引入接口文件以实现OPNET与MATLAB函数的相互调用,OPNET中引入瑞利衰落模型,并通过读取调制曲线计算误码率,能够更真实地反映水声网络信道。并针对OPNET水网络仿真中修改管道参数的方法无法引入物理层参数(信道传递函数、调制方式等)的局限,利用MATLAB将调制曲线导入OPNET并配合其他管道的配置;在两种具有结构差异的BELLHOP信道中对ALOHA协议进行仿真,结果表明信道结构变化灵敏的影响协议性能[67]。
5 结论
通过分析水声信道特性及其对水声网络设计的影响、对比分析水声信道物理层建模和网络仿真方法,阐明了水声信道和网络仿真的基本思路和方法。包括系统研究了水声信道典型传播特性,如传播时延、多径、能量受限、时-空-频变等,及其对通信网络的影响;对比了经验模型、声场求解模型、基于本征路径的多径信道模型和基于统计特性的时变信道模型等通信信道模型,仿真表明水声信道结构变化明显影响接收性能;分析了基于信道特性的水声网络仿真工具和模型,显示出水声网络仿真工具的发展逐步从仿真到仿真实验一体化系统、从改进成熟软件到开发独立软件的历程。
水声信道仿真模型是海洋信息化从理论到应用的纽带,其日趋完善是未来建设智慧海洋、打造海陆空天一体化信息网络的重要基础。水声通信与网络中信道建模与仿真的研究重点和难点有:①从物理层的角度,对声场进行快速和精确求解,需在提高算法速度和精度的同时基于并行架构进行计算,同时,在仿真软件中尽可能减小声场求解结果和实际信道的差异性;②从网络层的角度,更全面地模拟仿真物理特征,需要兼顾各种尺度、各种维度的信道变化,同时考虑实际应用中水声设备特性带来的影响;③对于实际应用,目前中国多家单位研制出了各自的水声调制解调器、相关仿真和实验平台,但各自孤立,迫切需要通用的、仿真和实验一体化的水声网络平台,便于同行交流、加快从理论到实验再到实用的研究步伐。
