基于全局寻优函数的AMT预测性爬坡档位决策方法
2021-03-07孙晓鹏郝功凯任宪丰胡永慧刘中秀
孙晓鹏 郝功凯 任宪丰 胡永慧 刘中秀
(潍柴动力股份有限公司电控研究院 山东省潍坊市 261040)
1 研究背景
电控机械式自动变速器(AMT)是在传统机械齿轮式变速器的基础上,加装一套选换挡执行机构和离合器执行机构[1],实现传动系统的自动换挡,使车辆获得良好的动力性和燃油经济性,同时减少驾驶员疲劳,提高乘坐舒适性,因此在商用车上得到了广泛应用[2]。坡道行驶是车辆行驶中的常见工况,对于搭载AMT的汽车合理决策爬坡挡位,对车辆的性能有着至关重要的影响[3]。
2 爬坡档位决策研究
2.1 传统控制策略
传统控制策略无法对道路进行提前预测,更多的依靠驾驶员个人经验进行提前换挡,以此来保证动力性的同时,也能够有效降低燃油消耗[4]。在实际工况下,整车负载变化和坡度的变化都会影响驾驶员的判断,无法保证整车处于最优档位,常常会导致燃油消耗过高[5]。
2.2 爬坡档位决策基本原则
结合传统控制策略与实际工况,对AMT爬坡档位决策制定以下原则[6-7]:
(1)保证爬坡动力性能,保证坡道上正常行驶;
(2)保证动力性的基础上,尽可能减小燃油消耗;
(3)坡前换挡,尽量避免坡道行驶过程中换挡。
2.3 爬坡档位决策逻辑设计
针对以上原则,设计爬坡挡位决策逻辑。为了节省TCU算力,检测到坡道后,当车辆行驶到坡前一定距离即决策距离时开始进行挡位决策,在爬坡前完成挡位切换并恢复扭矩。挡位决策控制流程图如图1所示。
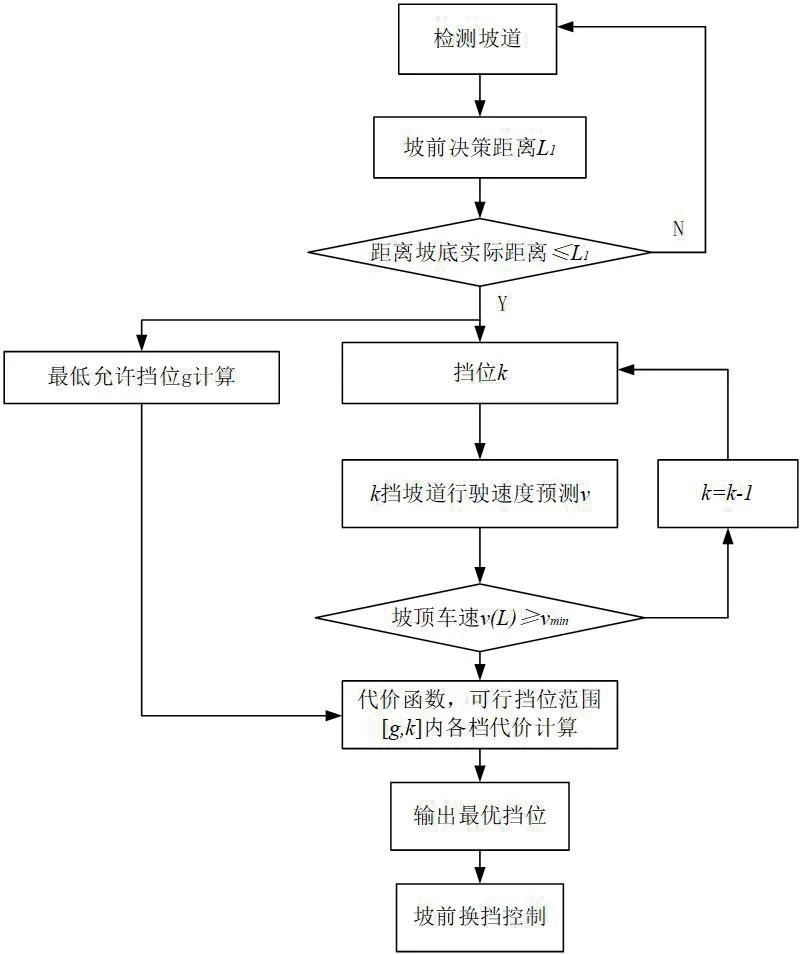
图1:挡位决策控制流程图
其总体思路为:车辆实时检测前方坡道,并根据当前的实际车速,计算决策距离,当车辆与坡底的实际距离小于决策距离时,使能爬坡挡位决策模块;使能决策功能后,计算最低允许挡位g;同时根据当前实际车速、当前挡位以及加速踏板开度,以当前挡位作为最高允许挡位,进行该挡位下的爬坡车速计算;使用最高允许挡位计算的爬坡过程中最小车速小于最低允许车速时,减小最高允许挡位,再次进行计算,直至满足条件,获取到最高允许挡位k;最低可行挡位和最高档位之间的挡位定义为可行挡位[g,k],并构建全局寻优函数,计算可行挡位范围内各挡位的爬坡代价,其中代价最小的挡位为最优挡位,作为最终决策挡位输出;根据输出的最终决策挡位,进行换挡执行操作。
具体计算过程和分析阐述:
(1)坡前决策距离:通过分析现有实车测试数据发现,外挂式气动执行机构的16档AMT变速箱完成换挡并恢复扭矩的时间一般为2s左右,所以进行坡前挡位决策的距离可定义为2.5s车速距离(可后期标定td),即以当前车速在2.5s内的行驶距离
L1=v0td
式中,v0为当前车速。
(2)最低允许挡位:同样发动机扭矩下,挡位越低输出至驱动轮的扭矩越大,车辆的动力性越好;但维持同样车速时,挡位越低,需求的发动机转速越高,所以最低允许挡位的选择考虑的是保证发动机不超速:

式中,ig为最低挡位g挡传动比,i0为主减速器传动比,r为车轮滚动半径,nmax为发动机最高转速。
(3)k档坡道行驶车速计算。由于本文是在爬坡前进行了预判并做出决策,所以以爬坡前驾驶员操纵的加速踏板开度并假设爬坡过程驾驶员加速踏板开度不变为预测依据。一定加速踏板开度下,根据发动机测试数,可以拟合出发动机输出扭矩和发动机转速之间的关系,即发动机部分负荷特性曲线T(ne),某一档位k档下,车速与发动机转速之间关系为:

式中,ik为k档传动比。该挡位下,车辆的驱动力为:

式中,nt为传动系统效率。所以,加速踏板开度不变时,k档下车辆的驱动力与车速之间关系函数可以精确求取,即Ftq(v)。车辆行驶时纵向动力学关系为:

式中,δ为旋转惯量转换系数,F∑(v,θ)为行驶阻力,包括滚动阻力、坡度阻力和空气阻力。考虑到坡道信息已知,可将时间域上的动力学关系转换成距离域上的关系,即 ,
通过转换,可得到:

由于道路坡度已知,即θ(s)为已知量,挡位一定时,车速v和s的关系是固定的,所以爬坡过程中车速关系为:

通过上式可求得爬坡过程中任意位置1处车速。
(4)全局寻优函数。设计全局寻优函数求可行范围内各挡位的代价,选择代价最小的挡位作为输出,可以获得设定目标下的最优挡位。为更好的节省燃油,同时尽可能减小爬坡过程中的降速,本文设计的全局寻优函数为:

式中,β为权重系数,mgf(v(s))为燃油消耗量在距离域上的导数。前一项为整个坡道行驶过程中的燃油消耗量。发动机的万有特性即燃油消耗率与发动机转速和扭矩有固定关系,而之前的分析可知某一挡位下发动机转速与车速、扭矩与车速关系也是固定的,所以上式燃油消耗量与车速关系是固定的,所以上式积分可以求出具体值。后一项为爬到坡顶后车速与爬坡前车速的差值代价。建立该全局寻优函数的目的是选择合适挡位使整个爬坡过程燃油消耗小,且兼顾车速,使车速尽量较少的偏离驾驶员预期。
3 爬坡档位决策结果验证
实验验证,当检测到坡度后,能够基于当前车速以及坡度,决策出最优档位,且此过程中油门开度保持不变。爬坡结束后,能够重新换回原档位,在兼顾驾驶员对车速的需求,最大程度的保证燃油经济性。爬坡档位决策试验验证结果如图2所示。
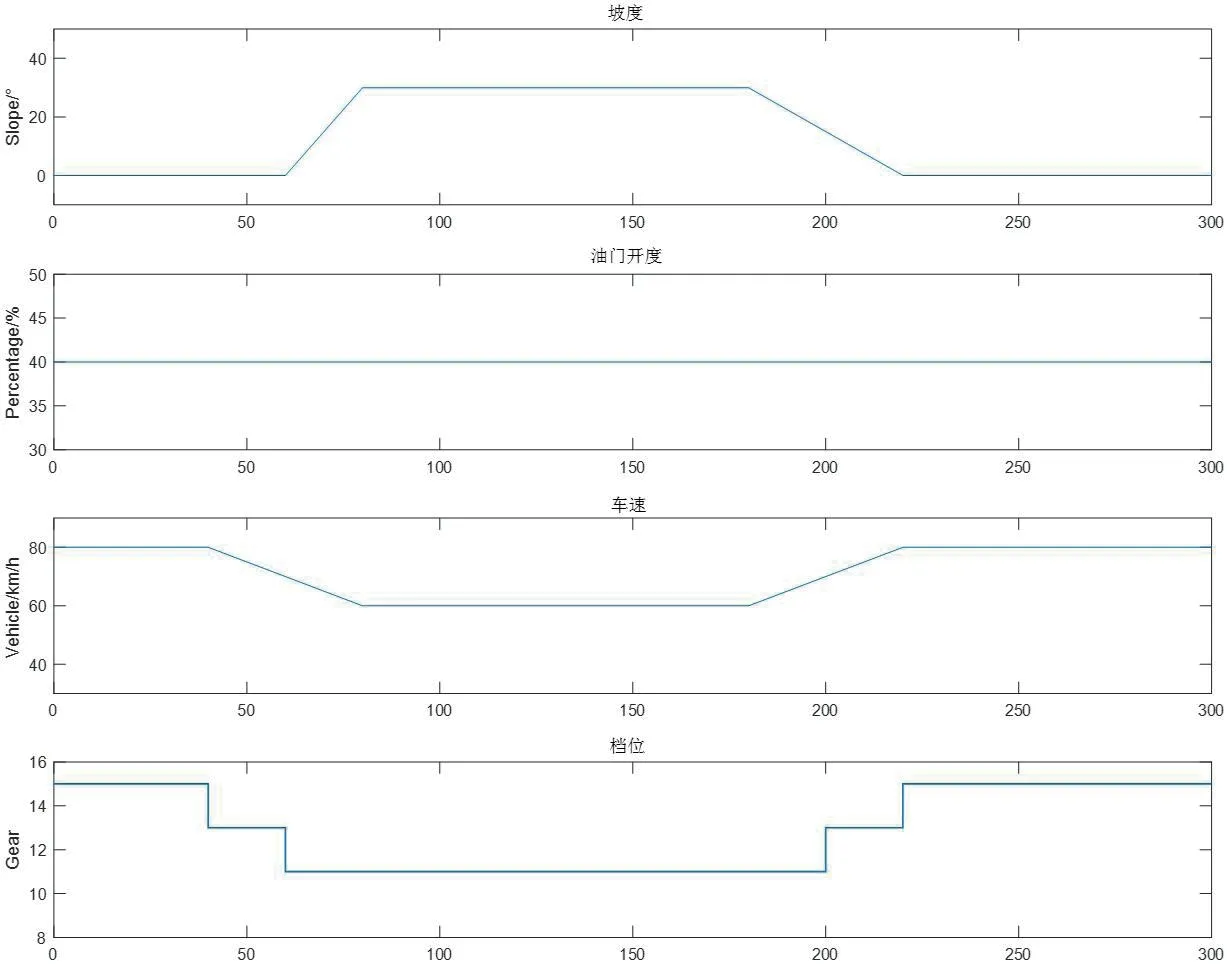
图2:爬坡档位决策试验验证结果
4 爬坡档位决策研究结果
对比传统控制策略,本文提供的爬坡换挡决策可提前决策并切换至合适挡位,避免了爬坡过程中动力中断换挡;在爬坡过程中,根据全局寻优函数,选择最小代价的挡位,减小爬坡过程中的燃油消耗,又兼顾驾驶员对车速的需求。此外,在实现时还需要考虑以下几点:
(1)坡前决策距离影响预测精度,决策距离越短,预测精度越高,需要对换挡时间进行大量测试;
(2)需建立较为精确的车辆纵向动力学模型以及精确拟合发动机的部分负荷特性曲线,才可以更精确地预测爬坡过程中车速;
(3)获得准确的发动机万有特性曲线并建立燃油消耗模型,并建立合适的全局寻优函数,取得相应的控制目标。
