潜地导弹目标控制快速计算方法
2021-03-05田春军李红伟
田春军,李红伟
(江苏自动化研究所,江苏 连云港 222061)
潜地导弹目标控制是潜地导弹作战辅助决策、反导防御的重要内容,在给定导弹的发射点后,分析导弹在射程上对目标的控制情况,快速给出对目标射程覆盖的准确结果是潜地导弹目标控制需要解决的关键问题。由于潜地导弹实际射程受地球自转、扁率等地球物理因素的影响[1-3],使得导弹东向发射射程增加,西向发射射程减小,且发射纬度、发射方位的不同,导弹的实际射程也将不同,因此在给定导弹发射点后,不能以导弹的标准最小、最大射程对目标进行射程覆盖的判断,否则将产生误判,进而做出错误的攻击决策。传统上潜地导弹最小、最大实际射程的计算是基于弹道方程采用数值积分迭代法求取,计算量大,耗时长,不能满足潜地导弹作战决策对时间性能的要求。
本文基于BP神经网络给出了一种潜地导弹目标控制的快速计算方法,给定发射点参数后可快速计算出全射向导弹最小、最大实际射程落点参数,避免了耗时较长的数值积分迭代计算过程,并通过仿真计算验证了算法的有效性。
1 地球物理因素对导弹射程的影响分析
1.1 射程计算
潜地导弹弹道运动微分方程组是一阶变系数非线性常微分方程组,发射坐标系中矢量形式[4]如式(1)所示,弹道运动微分方程组中的很多系数不是以解析式表示,而是以数表或图线的形式给出,因此只能用数值积分迭代法求其数值解,无法求出解析解。

(1)



(2)
而

(3)
式中,x0、y0、z0为发射坐标系坐标轴单位矢量。
因此

(4)
则射程L为
(5)

1.2 射程偏差与横向偏差
由于地球物理因素的作用,将使得导弹的落点产生射程偏差ΔL和横向偏差ΔH[5],如图1所示,o为导弹发射点,oe为地心,T0为地球物理因素作用下导弹落点,L0为落点T0的射程,T1为忽略地球物理因素作用的导弹落点,L1为落点T1的射程,T0在导弹射击平面oeoT1内的垂直投影点为T′,T′与T1之间的距离ΔL为射程偏差,T0与T′之间的距离ΔH横向偏差。规定,当T0在射击平面内的投影点T′在oT1外部时,射程偏差为正,反之为负;顺oT1方向看,T0在射击平面oeoT1的右侧时,横向偏差为正,反之为负。

图1 导弹落点偏差示意图


(6)
式中,φ0、λ0为发射点地心纬度和经度;φT0、λT0为落点T0地心纬度和经度;φT1、λT1为落点T1地心纬度和经度。
射程偏差ΔL的计算公式为
(7)
横向偏差ΔH计算公式为

(8)
上式中,ζ为横向偏差角。
1.3 自转因素对射程的影响分析
由于地球自转产生柯氏惯性力、牵连惯性力,使导弹受力发生改变,因而使导弹落点相对静止地球产生偏差。柯氏惯性力的大小及方向由2V×Ω决定,当导弹主动段关机点参数rk、Vk所决定的射击平面与赤道平面重合时,柯氏惯性力在赤道平面内,将使得导弹弹道参数发生变化,仅造成射程偏差,除上述情况外,柯氏惯性力作用的结果既产生射程偏差又产生横向偏差;当导弹主动段关机点rk、Vk所决定射击平面与赤道平面或子午面重合时,牵连惯性力仅造成射程偏差,除上述情况外,牵连惯性力作用的结果既产生射程偏差又产生横向偏差。
在科氏惯性力和牵连惯性力的综合作用下,导弹东向射击,射程增加,西向射击,射程减小,表1为地球自转因素对射程影响的仿真计算结果。
1.4 扁率因素对射程的影响分析
在考虑地球扁率αE时,地球引力为非心引力,如图2所示。
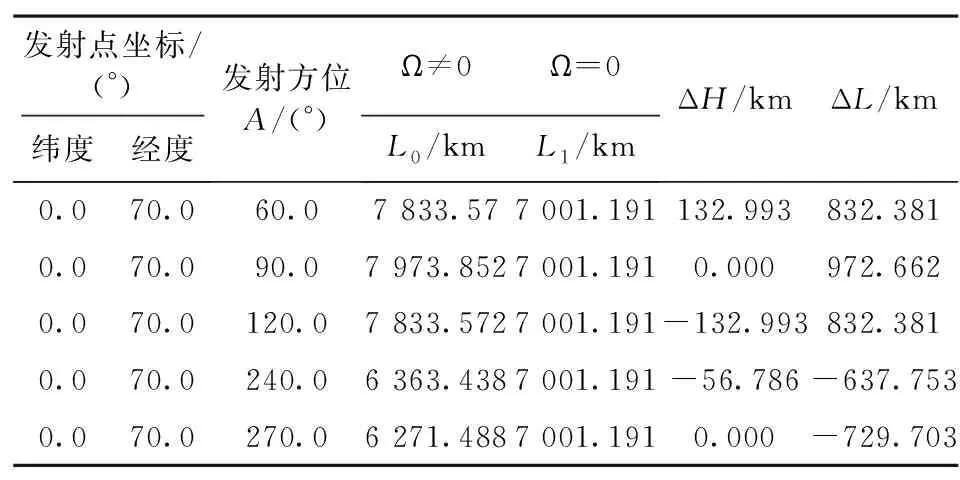
表1 地球自转因素对射程影响的仿真计算结果

图2 扁率因素作用下引力分解示意图
设m为导弹弹道上任一点,过m点子午面,令oem=r,r的单位矢量为r0,同时令在此子午面内垂直于r且指向地心纬度φ增加方向的单位矢量为φ0,考虑地球扁率时,同圆球地球比较,引力加速度g不仅r0方向有变化gr,φ0方向上也有变化gφ,因此弹道参数在r0和φ0方向上均产生偏差。此外由于地球扁率的存在引起地球几何形状的变化,其也引起导弹落点偏差。在弹道学中[5],前者称为动力学影响,后者称为几何学影响。动力学影响和几何学影响的仿真计算结果见表2、表3。

表2 扁率因素对射程动力学影响的仿真计算结果

表3 扁率因素对射程几何学影响的仿真计算结果
2 实际射程落点参数计算可行性分析
2.1 弹道运动微分方程解的存在性与唯一性
式(1)所示的弹道运动微分方程组可抽象地表示为如下所示的一阶变系数非齐次常微分方程组:

(9)
依据常微分方程理论,如果方程组(9)的右端函数F(t,Y)在要求的区域上连续,则对给定的初始计算条件,至少存在一个解;如果方程组(9)在要求的区域内同时满足Lipschitz条件,即右端函数F(t,Y)满足:∃N≻0,N∈R,∀t∈[a,b],∀Y∈D,不等式(10)成立,则方程组的解存在且唯一。

(10)
其中,‖‖表示Euclid范数;t为导弹飞行时间;Y、Y1、Y2为求解的弹道参数向量;D为有界闭域(弹道参数取值范围);F(t,Y)为右端函数向量。
弹道运动微分方程组右端函数的连续性可理论分析出来,但由于弹道运动微分方程组结构的复杂性,Lipschitz条件的不等式(10)通常采用数值求解方法进行验证,通过对弹道运动微分方程的理论分析和大量的数值验证,可证明出弹道运动微分方程的解存在且唯一。
2.2 BP神经网络计算实际射程落点参数可行性分析
由于弹道运动微分方程组的解存在且唯一,因此弹道运动微分方程组计算发射条件与落点参数之间存在一一对应的关系,本质上弹道运动微分方程组建立了一种由发射条件到落点参数的这种输入-输出模式的非线性映射关系。BP神经网络具有非常强的非线性映射能力[7],只要能够提供足够多的训练样本供BP神经网络进行学习和训练,它便能够完成从n维输入空间到m维输出空间的非线性映射,同时由于BP神经网络具有非常强的泛化能力,当向网络输入非样本数据时,网络能够完成由输入空间到输出空间的正确映射。因此可利用BP神经网络能够以较高精度逼近复杂非线性映射及具有自适应学习能力的优点,通过BP神经网络的学习与训练,便建立出满足精度要求的神经网络模型,从而实现导弹实际射程落点参数的高精度快速计算。
3 潜地导弹目标控制快速计算方法
潜地导弹目标控制是通过计算潜地导弹的最小、最大实际射程实现的,对于基于发射点的目标控制计算而言,需要计算发射方位[0,360°)上的最小、最大实际射程对应的落点参数,如采用传统采用数值积分迭代方法,将花费较多计算时间。假设计算一个发射方位上最小射程和最大射程计算时间相同,均为t0秒(t0>0.1),发射方位间隔为0.1°,则需要花费的总计算时间T为
T=360/0.1×t0×2=7200t0
(11)
由式(11)可知,至少需要720 s。
采用BP神经网络进行潜地导弹目标控制的快速计算,主要是解决以下几个问题:
1)潜地导弹目标控制快速计算输入输出变量的确定;
2)BP神经网络训练样本的设计;
3)BP神经网络的结构设计。
上述几个问题解决后,通过BP神经网络的学习和训练,便可得出满足精度要求的计算模型。
3.1 定义
基于发射点等射程线:给定发射点(B0,λ0),发射方位A0∈[0°,360°)上导弹的最小实际射程Lmin、最大实际射程Lmax落点所构成的弧线,B0为发射点地理纬度。根据该定义,潜地导弹目标控制计算即需要计算出基于发射点等射程线。
3.2 计算变量的选择
对于函数关系明确的系统,系统的输入输出变量通常就是BP神经网络的输入输出变量。输入变量一般选取对输出影响大的变量,此外还要求输入变量之间不相关或相关性很小且输入变量能够提取。
对于潜地导弹目标控制计算,通过对弹道运动微分方程组的深入分析并结合仿真计算,可知发射条件(B0,λ0,A0)和实际射程(Lmax,Lmin)之间为一一对应的非线性映射关系,即发射条件和实际射程之间建立了输入-输出模式映射关系,这种映射关系存在且唯一。输入变量选取为(B0,λ0,A0),输出变量选取为(Lmax,Lmin),但由于最大射程和最小射程对应的是落点的纬度和经度,因此输出变量还可选取为最大射程对应落点的纬度、经度(Bmax,λmax)和最小射程对应落点的纬度、经度(Bmin,λmin),仿真计算表明,输出变量选取落点纬度和经度能够得到更高精度的计算结果。
3.3 输入输出数据预处理
根据输入输出样本数据的特点,将输入输出样本数据归一化处理,将输入输出数据限制在[-1,1]区间内,采用下式[7]:

(12)
式(12)中,xi为样本数据;xmin表示样本数据最小值;xmax表示样本数据最大值;xmid表示样本数据中间值。
按式(12)进行归一化后,处于中间值的原始样本数据为零,最大值和最小值分别为1和-1。
3.4 训练样本的设计
训练样本的选择对于BP神经网络的设计实现有极其重要的影响,通常样本越多,BP神经网络的训练结果越好,但当样本多到一定程度时,BP神经网络的精度也很难再提高。在样本选择时,一方面,样本要有代表性,因为BP神经网络训练提取的规律是蕴含在样本中的;另一方面,样本选择时要注意类别的均衡性。在BP神经网络训练时,不同类别的样本要交叉输入,或从训练集中随机选择输入样本,有利于BP神经网络的训练效果。
基于上述说明,采用如下方式对所要研究的问题进行样本的设计:
1)由于地球为旋转椭球体,发射点经度取为固定值λcon;
2)依据使用范围要求,设置发射点纬度区间为[-Bcon,Bcon],取值间隔为1°;
3)发射方位区间为[0,360°),间隔取0.5°。
将以上三点进行组合,生成为发射点样本,通过弹道计算生成落点样本,并将其一部分作为训练集,另一部分作为测试集。
3.5 BP神经网络的结构设计
计算变量选择完毕后,BP神经网络的输入层节点数和输出层节点数便确定了,剩下问题主要是BP神经网络的隐层数及每个隐层节点数,对于这个问题,不存在通用性的理论指导,一般需要神经网络的设计者依靠实践经验通过反复的试验解决。
3.5.1 隐层数的设计
一个具有单隐层的网络可以精确实现任意连续函数,只有学习不连续函数时,才需要两个隐层[7],所以BP网络最多只需要两个隐层。一个三层的BP神经网络已有丰富的实现映射或逼近能力,一般采用一个隐层的网络即可。因此针对本文所研究的问题,在进行BP神经网络结构设计时,仅设计一个隐层便可满足要求。
3.5.2 隐节点数的设计
隐节点数太少,BP神经网络从样本中获取信息的能力就较差,隐节点数量过多,不仅增加BP神经网络的训练时间,有时还会出现“过拟合”的现象,降低网络的泛化能力。通常采用试凑法确定隐节点数,即先设置较少的隐节点训练网络,然后逐渐增加隐节点,用同一样本进行训练,从中确定出BP神经网络误差最小时对应的隐节点数。
3.6 Matlab神经网络计算
Matlab神经网络工具箱中提供了BP神经网络计算,其提供的BP算法及相应的训练函数有附加动量法、自适应学习速率法、RPROP方法、共轭梯度法、拟牛顿法及Levenberg-Marquardt方法等。对某一特定问题,很难确定哪种算法最快最好,因为其取决于问题的复杂性、训练样本数、网络权重和阈值个数及期望误差等许多因素,在多数情况下,建议使用Levenberg-Marquardt方法[8]。
BP神经网络计算除了训练函数的选取很重要之外,转移函数的选取也很重要,主要有以下三种转移函数:
logsig函数:
(13)
tansig函数:

(14)
purelin函数:
f(x)=x
(15)
在神经网络的结构和权值、阈值相同的情况下,通常隐含层转移函数选用logsig或tansig,输出层转移函数选用purelin[9]。
4 仿真计算与结果分析
4.1 BP神经网络的训练
图3~图6为BP神经网络对训练集的训练结果情况,其中图3、图4为对最大射程落点经纬度的训练结果,图5、图6为对最小射程落点经纬度的训练结果。
从仿真计算结果可以看出,BP神经网络通过对训练样本的学习训练,对于导弹最大、最小射程落点纬度、经度的计算达到了很高的计算精度。
4.2 BP神经网络的测试
图7~图10为BP神经网络对测试集的测试结果情况,其中图7、图8为对最大射程落点经纬度的测试结果,图9、图10为对最小射程落点经纬度的测试结果。
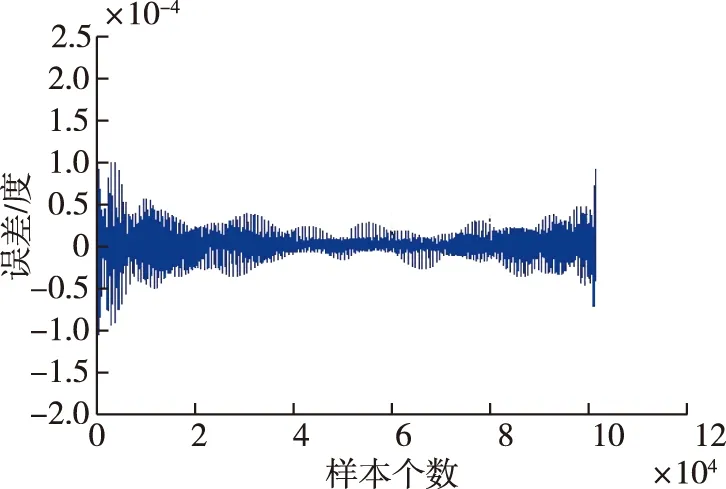
图3 最大射程训练数据落点纬度计算误差

图4 最大射程训练数据落点经度计算误差

图5 最小射程训练数据落点纬度计算误差
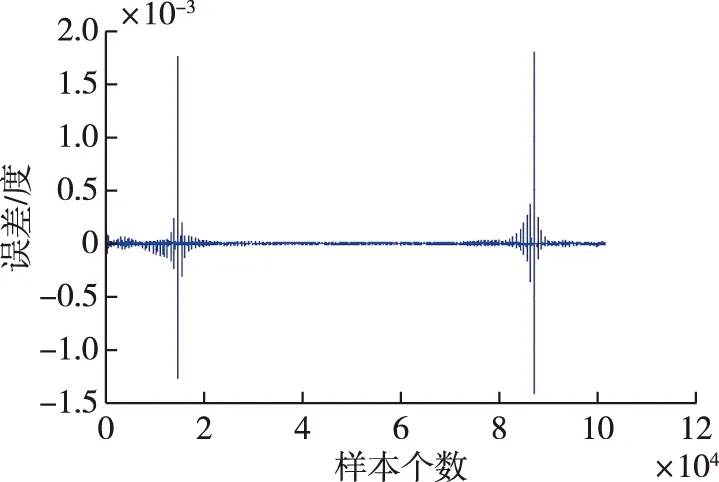
图6 最小射程训练数据落点经度计算误差
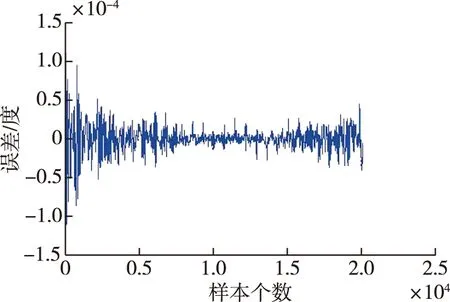
图7 最大射程测试数据落点纬度计算误差

图8 最大射程测试数据落点经度计算误差
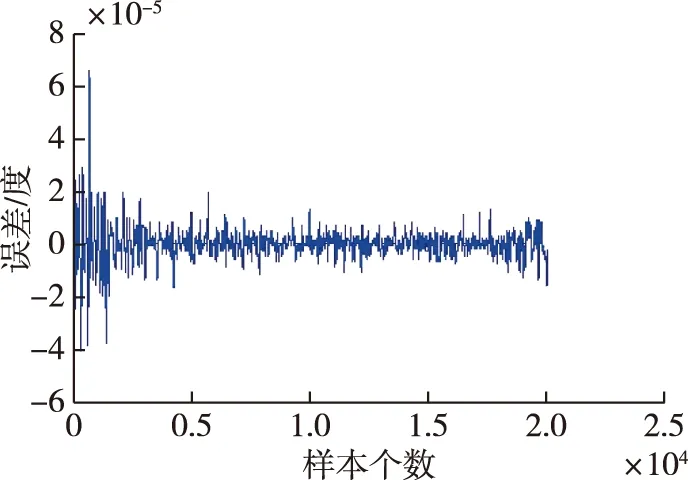
图9 最小射程测试数据落点纬度计算误差
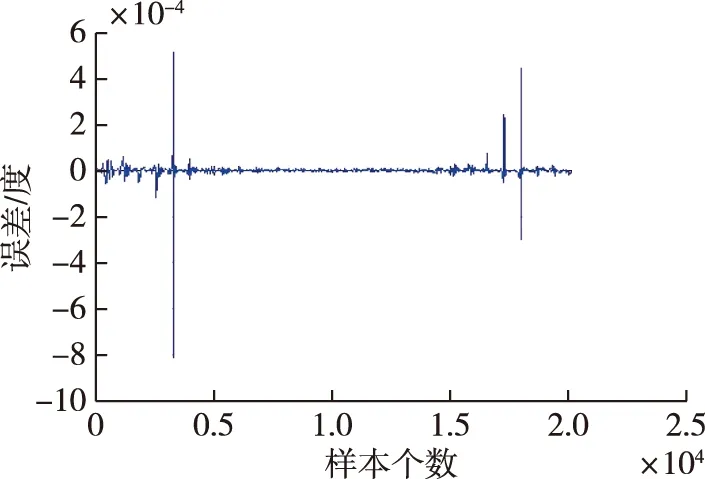
图10 最小射程测试数据落点经度计算误差
从测试结果可看出,已训练好的BP神经网络具有相当好的泛化能力和较高的计算精度,同时经统计,在Pentium D 3.0G计算机上计算一个落点的平均计算时间小于5 ms,在计算精度和时间上可满足潜地导弹目标控制需求。
4.3 基于Matlab的等射程线绘制
图11为采用Matlab语言绘制的基于发射点等射程线示意图。由于地球为旋转椭球体,为了显示效果的直观性,将发射点的经度固定为0°。在图11中,“+”的等射程线为导弹的实际最大射程、最小射程,“.”的等射程线为导弹的标准最大、最小射程,“*”为发射点。从图中可以直观地看出,导弹向东射击射程增加,向西射击射程减小,地球扁率、旋转等因素对导弹的实际射程有较大的影响,且这种影响随着射程的增加而增大。

图11 基于发射点等射程线示意图
5 结束语
本文基于BP神经网络建立了潜地导弹目标控制快速计算方法,即潜地导弹最大、最小实际射程落点的高精度计算模型,实现了基于发射点等射程线的快速计算,较好地解决了传统算法计算时间长的问题,显著提高了潜地导弹的目标控制能力,为工程应用奠定了技术基础。
