超声电机的接触磨损和机械特性
2021-02-22纪跃波
刘 炯, 纪跃波
(集美大学机械与能源工程学院, 福建厦门361021)
旋转型行波超声电机是利用压电陶瓷的逆雅典白效应,通过定子表面的微幅振动摩擦驱动转子的一种新型微特电机[1-3],优点为输出转矩大、动态响应快、不受磁场干扰等,广泛应用于航空航天、医疗器材、仪器仪表等领域[4-5]。
超声电机能量传递通过定、转子接触面的摩擦耦合实现能量输出。由于定子和转子摩擦机理较复杂, 因此在分析超声电机接触面的摩擦损耗和机械特性时,对电机接触模型进行了较多简化。周盛强等[6]对超声电机接触面进行空间三维分析,得出在一个波长内接触单元接触力的分布,但是未分析接触应力沿径向分布情况。Xu等[7]通过对转子结构的优化,利用转子腹板的变形,改善定、转子之间的接触状态,进而达到改善电机机械性能的目的。陈超等[8]构建超声电机定子的子结构分析模型,提出柔性转子概念,并指出超声电机定、 转子之间的径向磨损不可忽略。Zeng等[9]通过在定子齿表面增加凹型区域,使定、 转子产生不连续的接触面,减少摩擦层的磨损,改善电机的机械性能。
电机的特殊驱动方式使得关于接触应力分布以及摩擦损耗情况的研究对改善超声电机的机械性能具有重要的意义。本文中建立定、 转子接触分析模型,分析接触面质点滑动状况,并在此基础上分析接触应力在接触区域的分布,以及接触应力沿径向和周向的分量,揭示在不同负载时,接触区域沿周向驱动区域和阻碍转动区域的分布形式,阐述在空载和一定负载情况下接触面摩擦损耗存在形式,进一步提出新型摩擦层结构,使接触应力沿径向均匀分布,改善超声电机的机械性能。
1 超声电机分析模型
1.1 定子的运动方程
根据克希霍夫薄板理论,定子中性面压电陶瓷振动产生行波在柱面坐标系中可表示为
w=Wsin(nθ-2πft),
(1)
式中:w为中性层表面质点的轴向位移;W为超声振动的振幅;n为中性面周期行波个数;θ为弧度;f为外加电压的激振频率;t为时间。
由于中性面质点的振幅远小于定子轴向厚度,因此可以认为定子齿表面质点轴向位移与中性面质点位移相同。定子齿表面质点的周向位移为
(2)
式中:h为定子齿上表面到中性面的距离;r为定子外径。
由式(2)可得,质点周向速度为
(3)
由此可知, 当定子结构、 模态阶数和谐振频率确定后, 超声电机的最大转速小于v2。 定、 转子接触区域运动趋势和接触面质点的运动分量如图1所示。

er—径向; eθ—周向; ez—轴向; (r, θ , z)—柱面坐标; v1—径向速度; v2—周向速度; v3—轴向速度。
1.2 接触模型
选择旋转型行波超声电机(TRUM-60-P型,直径为60 mm,江苏春生超声电机有限公司),采用有限元分析软件ANSYS建立超声电机接触分析三维模型, 如图2所示。选择八节点六面体单元Solid185对分析模型进行网格划分,采用扫掠网格划分方法,对接触区域网格进行密集处理。根据超声电机传动机理,定、 转子接触面的接触形式属于面-面接触,使用目标单元Targe170和接触单元Conta174。由于定子具有较大硬度,因此在建立接触面对时,设置定子齿表面为目标面,设置摩擦层下表面为接触面,指定接触面摩擦系数μ。为了使模型与实际工作相符合,在转子上表面施加预压力F,并在转子孔施加径向约束,对定子的螺钉孔施加全约束。根据中性面相关知识,将定子中性面以下部分略去,只考虑中性面及其以上的部分[10],因此在定子中性面施加式(1)所示的行波,超声电机负载施加在转子孔表面。超声电机分析模型参数如表1所示。

er—径向; eθ—周向; ez—轴向; (r, θ , z)—柱面坐标;(X, Y, Z)—有限元软件中的坐标系,本文中设置为(er, eθ, ez)。

表1 超声电机分析模型参数
2 接触面动力特性和摩擦损耗分析
2.1 定、 转子接触滑移分析
定子齿表面质点的位移曲线为空间椭圆[11], 径向滑动和周向滑动是造成能量损耗的2种主要方式。 径向分量的滑动损耗是完全损失的能量, 周向滑动是驱动转子转动的因素。 图3所示为电机空载时接触面质点径向滑动位移曲线。 由图可知, 在对转子施加预压力F为50 N后, 转子腹板和定子腹板会发生一定的弯曲变形, 造成摩擦层质点产生一定的径向位移。 电机进入稳定状态后, 摩擦层接触表面质点在接触区域位移变大, 定子齿表面质点位移变小, 接触面质点在接触区域相对滑动距离为0.077 μm。

图3 电机空载时接触面质点的径向滑动位移曲线
图4所示为一个波长内接触面定子齿表面质点和摩擦层表面质点的周向滑动位移。从图中可以看出,在空载时,接触区域内摩擦层表面质点周向滑动距离大于定子齿表面质点周向滑动距离。在施加一定负载时,摩擦层表面质点周向滑移距离减小,并小于定子齿表面质点滑移距离。
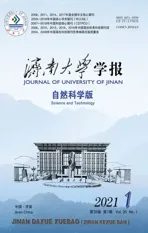
出现上述现象的原因是接触区域定子齿表面质点速度不同,其中慢的质点阻碍转子转动,快的质点驱动转子转动。在空载和转矩为0.1 N·m时,定子接触面质点与摩擦层接触面质点的速度差如图5所示。从图中可以看出,由于空载时需要较小的驱动力即可驱动转子,因此接触驱动区域较小。当施加一定负载时,接触驱动区域变大,接触面质点的相对滑动变大,并且负载越大, 周向滑动距离越大,因此随着负载的增加,电机转速减小。当周向滑动位移等于定子接触面质点沿圆周方向的位移时,电机处于堵转状态。

图4 一个波长内接触面定子齿表面质点和摩擦层表面质点的周向滑动位移
(a)空载
2.2 接触应力分析
根据定、 转子接触面的运动机理,定、 转子分别受到径向、周向、轴向接触应力[12]。在一个波长范围内接触应力沿径向和周向的分布如图6所示。从图中可以看出,接触应力主要分布在接触面内侧。随着半径的增大,接触应力变小,沿径向不均匀分布。沿周向分量大于沿径向分量,并且普遍为径向接触应力的2~3倍。

(a)径向
通过对接触面质点滑动距离和接触应力沿径向和周向分量的分析可知,超声电机接触面径向摩擦损耗造成的能量损失较大。在空载时,接触区域径向滑动距离为0.077 μm,周向滑动距离为0.076 μm,并且摩擦层质点位移大于定子齿质点位移。当转矩为0.1 N·m时, 接触面质点周向滑动距离为0.164 μm。由此可以计算得出:在空载时,径向摩擦损耗占接触面摩擦损耗的33%;在电机负载为0.1 N·m时,径向摩擦损耗占接触面摩擦损耗的19%。负载转矩变大,周向滑移距离变大,进而周向摩擦损耗变大。
3 对摩擦层的优化设计
在超声电机工作时,定、转子接触面接触均匀与否是衡量超声电机机械性能的重要参考。当对转子施加预压力后,转子的柔性变形会造成接触状态沿径向分布不均匀。半个波长内接触区域的接触应力分布如图7所示。超声电机特殊的传动机理使其接触面接触应力在定子振幅波峰处,并且接触应力不是沿波峰对称分布的。从图中可以看出,接触应力主要分布在接触面内侧,进而在电机工作时造成内侧磨损严重,外侧没有接触的情况。

(a)二维分布
采用共聚焦显微镜(VK-1000型,日本基恩士公司)观察超声电机接触面摩擦层的磨损情况,结果如图8所示。从图中可以看出,磨损区域主要集中在接触面内侧,说明在超声电机工作时,接触面接触应力集中在摩擦层内侧,通过定子接触面质点摩擦驱动转子转动,而摩擦层外侧没有起到传递转矩的作用,与接触应力主要分布在接触面内侧的分析结果相符合。

图8 超声电机接触面摩擦层的磨损情况
为了使超声电机接触面径向接触均匀和改善输出特性,提出一种新型摩擦层结构,如图9所示。该结构使摩擦层接触面内侧有一个倾斜角, 当施加一定预压力时, 转子会发生柔性变形, 使接触面接触均匀, 并且在此基础上增加一定的沟槽。 采用相同的转子和定子, 在相同的边界条件下, 一个波长内接触区域的接触应力分布如图10所示。 从图中可以看出, 在一个波长范围内, 接触应力沿径向均匀分布。

图9 超声电机新型摩擦层结构

(a)二维分布
在相同边界条件下, 通过对转子施加不同的负载转矩, 得到超声电机的特性曲线, 如图11所示。 从图中可以看出, 采用新型摩擦层的电机可以获得更大的转矩, 具有良好的机械特性。 在有负载的情况下, 新型摩擦层接触面驱动区域面积较大, 并且未优化摩擦层接触面沿周向接触长度较大, 其中速度较小的部分为非传动区, 阻碍转子转动, 新型转子在周向接触长度较小, 从而可以输出较大的转矩。

图11 超声电机的特性曲线
4 结论
本文中建立了超声电机三维接触分析模型, 通过数值仿真分析了定、 转子径向滑动与周向滑动随负载的变化情况, 为了改善滑动损耗, 建立摩擦层新构型,并进行了仿真计算,得出以下主要结论:
1)在空载时, 定、 转子接触面质点沿径向滑动距离大于沿周向滑动距离, 接触面径向摩擦损耗和周向摩擦损耗相差很小; 随着负载的增大, 接触面周向滑动变大, 此时主要的能量损失形式为周向滑动损耗。
2)周向滑动区域分为阻碍转子转动区域和驱动转子转动区域,并且随着负载增大,驱动转子转动区域增大。
3)新型摩擦层构型优化了定、 转子接触模型,使接触应力沿径向均匀分布,增加了驱动转子转动区域,改善了超声电机的机械特性。