施肥无人机槽轮式排肥器槽轮结构参数优选
2021-02-19宋灿灿周志艳王国宾王勋威
宋灿灿,周志艳,王国宾,王勋威,臧 英
•农业装备工程与机械化•
施肥无人机槽轮式排肥器槽轮结构参数优选
宋灿灿1,周志艳2,3,王国宾1,王勋威2,3,臧 英2,3※
(1. 山东理工大学农业工程与食品科学学院,淄博 255049;2. 华南农业大学工程学院/广东省农业航空应用工程技术研究中心,广州 510642;3. 广东省农业人工智能重点实验室,广州 510642)
现有槽轮式排肥器存在低转速下脉动性较强和排量范围较小的问题,较难满足农用无人机低空高速施肥对大排量范围以及排量连续性和准确性的要求。针对以上问题,该研究设计了凹槽形状和凹槽列数不同的排肥槽轮,并利用EDEM仿真模拟和台架试验测试了各槽轮的排量范围以及排肥时的脉动性和准确性,优选出满足无人机施肥要求的排肥槽轮。仿真结果表明,转速为10~40 r/min时,凹槽的截面形状和列数对脉动性影响较大,且直槽槽轮的脉动性较为明显,外切4列和内切5列对脉动的幅度和时间间隔的影响最小。台架试验结果表明,转速为40~120 r/min时,各槽轮排放复合肥和尿素的排量均在17 kg/min以上,且均随转速的增大而增大,能够满足无人机施肥时对排量的需求。方差分析表明凹槽截面形状和凹槽列数的主效应和交互作用对排量的影响均显著(<0.05),而且会受到转速的干扰。对于复合肥,外切6列、直槽6列和外切5列槽轮的变异系数波动最小,基本稳定在1%以内;内切4列、内切6列和外切4列槽轮的变异系数波动范围稍大,但均在3%以内。对于尿素,内切4列和直槽4列的变异系数波动较大,排量准确性较差,内切6列和直槽6列槽轮的变异系数波动较小,基本稳定在1%以内;直槽5列、内切5列、外切4列、外切5列和外切6列槽轮的变异系数波动范围基本在1%~2%。综合低转速下的排量脉动性和高转速下的排量准确性,为了确保不同转速下的排肥效果,施肥无人机排放复合肥时可选择外切4列槽轮,排放尿素时可选择外切4列或内切5列槽轮。该研究可为施肥无人机的排肥性能研究提供参考。
无人机;离散元法;槽轮优化;脉动性;排肥器;颗粒肥
0 引 言
机械化施肥对于提高肥料利用率和施肥作业效率具有重要作用。鉴于国内复杂的地形地貌和田间作业环境,目前的地面施肥机械作业范围受到限制,开发新型施肥机械对于扩大中国机械化施肥作业面积,提高作物田间施肥管理的现代化水平具有重要意义。农用无人机可实现低空自主飞行,避免与作物和地表接触,能够灵活避开障碍物,适应复杂的田间环境[1-3],在田间作业中优势明显。无人机施肥能够解决部分地区地面机械在田间通过性较差导致的追肥困难的问题,作为新型施肥机械,是对地面机械的良好补充,有利于促进田间机械化施肥技术的发展。
排肥器是施肥机械的关键部件之一。槽轮式排肥器结构简单,且排量调控精准、方便,因而被广泛应用[4]。宋灿灿等[5]在设计施肥无人机排肥装置时采用了槽轮式排肥器,并通过试验验证了在农用无人机上使用该种排肥器的可行性。但采用槽轮式排肥器进行无人机施肥还需要考虑两个方面的问题:一是施肥无人机体型小,有效载荷有限,轻便且排量范围较大的槽轮式排肥器有助于增加肥料装载量,提高作业效率[6]。二是现有的槽轮式排肥器在低转速下的脉动性较强[7]。由于施肥无人机前进速度较高,排肥器产生的颗粒流呈现周期明显的间歇性的振荡,容易出现颗粒沉积区域不连续,造成少施,甚至漏施。
目前国内关于施肥无人机排肥器的研究较少,地面施肥机械槽轮式排肥器的研究较多。研究学者针对槽轮工作有效长度、排肥舌开度和槽轮形状等结构参数对排量的影响以及排量的自动调节问题进行了大量研究[8-11]。研究结果表明,增加槽轮的有效工作长度、增加排肥舌的开度和改变槽轮形状都对排量范围和准确性产生影响。
通过改变槽轮的结构还可以优化槽轮的脉动性。齐兴源等[12]在传统直槽槽轮基础上设计了交替排列的锥形排肥齿,工作时,排肥齿交替囊入颗粒肥,弥补了直槽槽轮的缺陷,能够有效地减小排肥时的脉动性,改善排肥效果。刘春波等[13]设计了螺旋槽槽轮并通过试验研究了螺旋槽的开度和角度对排量脉动性的影响。研究结果表明,螺旋槽轮开度与排量之间存在极其显著的线性相关关系,可通过调节螺旋槽轮开度和槽轮转速调节排量,形成连续的颗粒流,降低脉动性。上述研究表明,通过改变容积和凹槽的截面形状等参数能够降低槽轮排肥时的脉动性。
目前农用无人机施肥已成为国内学者的研究热点。鉴于施肥无人机的低空高速作业特点,较大的排量范围和较低的脉动性是提高无人机施肥质量需要解决的关键问题,但这方面的研究还比较欠缺[14]。如何在有效载荷有限的情况下设计方便拆卸的槽轮式排肥器,研究槽轮的结构参数对于获得较大排量范围,改善排肥的连续性和准确性是十分必要的。本文拟针对初代施肥无人机槽轮式排肥器的安装特点设计便于拆装的排肥器,研究槽轮结构参数对排肥脉动性的影响,通过参数优化获得合适的槽轮结构,以提高施肥无人机排肥时的准确性和连续性。
1 施肥无人机排肥器结构设计与工作原理
1.1 槽轮式排肥器结构组成
如图1所示,施肥无人机主要由农用无人机、肥箱、排肥器和撒肥器组成。肥箱放置在无人机机身中间,方便装卸,有效载荷约为30 kg。排肥器安装在肥箱底部,连接肥箱和撒肥器,用于将肥箱中的颗粒肥排放至撒肥器中。图2所示为可插拔的槽轮式排肥器,该排肥器顶部为入肥口,通过肥箱连接件与肥箱连接,排肥器底部留有出肥口。排肥器壳体分为紧固件端和电机端2部分,其中,紧固件端壳体壁面设有圆形开口,便于插拔槽轮;电机端壳体设有电机定位孔,用于安装排肥电机。安装时,首先将排肥电机安装在电机端壳体上,将锥形轴与电机轴配合;其次将两部分壳体固定联接,然后安装导流板;最后将紧固件固定在槽轮轴一端,将槽轮从另一端插入槽轮轴,并将组合后的槽轮插入壳体内部,与锥形轴配合,待槽轮安装到位后使用螺丝将紧固件固定在壳体侧壁上。安装完成后,可直接从紧固件端抽出槽轮进行内部清洁或更换槽轮。
排肥器工作时采用侧边充肥,颗粒肥沿导流板进入壳体底部,填充槽轮凹槽。槽轮转动过程中,强制带动凹槽内的颗粒肥从另一侧排出,多余的颗粒肥被导流板阻拦在充肥侧。在槽轮转动的过程中,壳体与槽轮之间的底部空间随即被肥料再次从侧面填充完成。导流板与槽轮的间距可根据不同类型颗粒肥的流动性进行调节。与传统槽轮相比,该设计既能增大颗粒进入凹槽的范围,又可避免肥料靠重力自动滑落[15]。
1.2 槽轮的结构设计与参数分析
在影响槽轮式排肥器作业效果的槽轮结构因素中,凹槽数目、槽轮有效工作长度、槽轮半径和单个凹槽的截面形状等为主要因素[16]。适宜的凹槽截面形状和容积能够改善颗粒肥的填充效果[17],但当凹槽的填充率达到最大时,槽轮每分钟的排量也不再随着转速的增大而增大[18]。为了能够在不改变排肥器壳体结构和槽轮有效长度的基础上改善初代施肥无人机排肥器的脉动性,提高排量准确性,本文从凹槽截面形状和凹槽列数2个方面对槽轮进行优化设计,设计的9种槽轮如图3所示。槽轮的长度均为98 mm,外圆直径均为60 mm。直槽槽轮的排肥齿为直线形,凹槽的相邻排肥齿之间的夹角为60°;外切槽槽轮排肥齿的直线长度为12 mm,相邻排肥齿之间的夹角为45°,末端为圆弧形,半径为8.39 mm;内切槽槽轮排肥齿的直线长度为15 mm,凹槽的相邻排肥齿之间的夹角为为45°,偏心距为20.45 mm,末端为圆弧,半径为4.39 mm。在槽轮的轴向设置不同的列数(分别为4、5和6列),改变槽轮的凹槽数目和容积,进而影响颗粒肥在槽轮中的运动状态。各槽轮结构的具体参数如表1所示。
以单个肥料为研究对象,忽略颗粒之间的相互作用,假设颗粒只有沿槽轮外壁的滑动,并在排肥齿末端获得与槽轮相同的切向速度。单个肥料在3种凹槽形状不同的槽轮中填充的受力情况如图4所示。
从图4a可以看出,直槽槽轮的排肥齿呈直线型,底部的颗粒受到了直线型排肥齿沿正向的支持力,在该排肥齿从当前位置旋转至水平位置前,颗粒的切向加速度a沿正向,颗粒有从排肥齿末端离开凹槽的趋势,不利于充分填充。
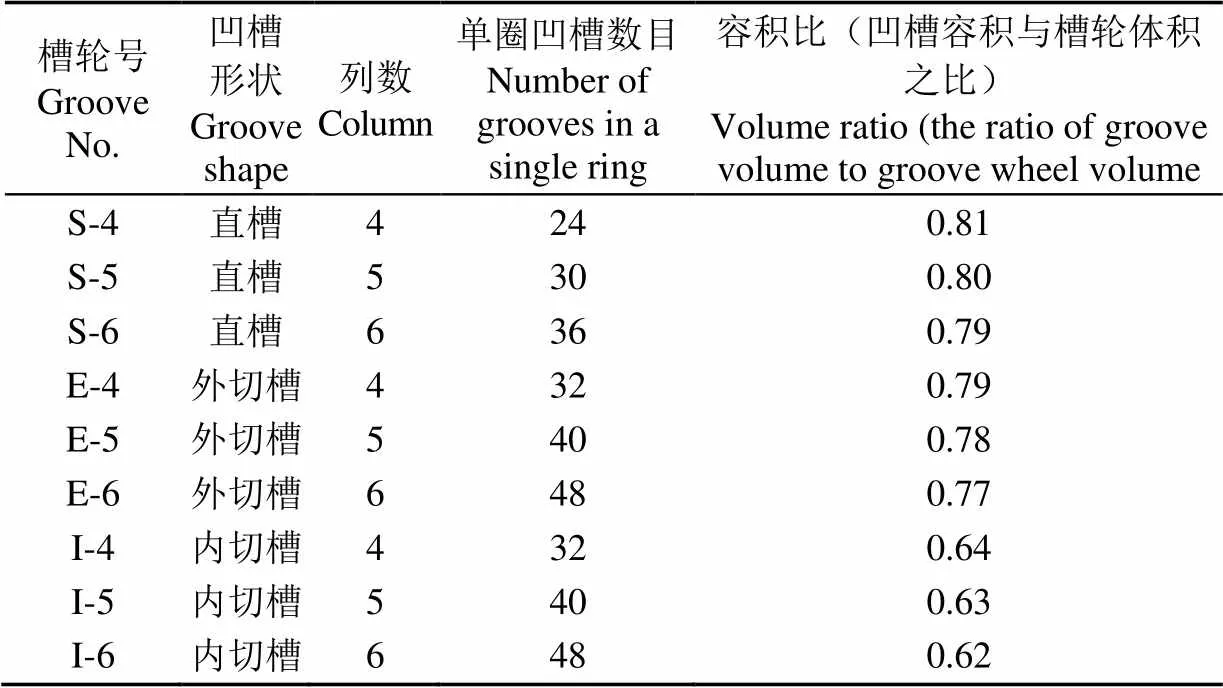
表1 槽轮的结构参数
注:S-4、S-5和S-6分别代表直槽4、5和6列槽轮;I-4、I-5和I-6分别代表内切槽4、5和6列槽轮;I-4、I-5和I-6分别代表外切槽4、5和6列槽轮。
Note: S-4, S-5 and S-6 represents respectively straight groove with 4, 5 and 6 columns; I-4, I-5 and I-6 represents respectively internally tangent groove with 4, 5 and 6 columns; E-4, E-5 and E-6 represents respectively externally tangent groove with 4, 5 and 6 columns.
从图4b可以看出,外切槽槽轮的排肥齿分为2部分,末端与槽轮圆周相切,始端呈直线型,与外侧圆弧相切。圆弧形排肥齿对颗粒的支持力F2指向槽轮的圆心内侧,切向加速度a沿负向,使得颗粒具有向下运动的趋势,能够顺畅地进入凹槽中,并且在槽轮向上旋转的过程中也不容易弹出。从图4c可以看出,内切槽槽轮的排肥齿分为2部分,末端呈直线型,与槽轮的圆心有一定的偏心距,始端呈弧形,并且与相邻的排肥齿相切。由于偏心距的存在,排肥齿末端对颗粒的支持力F2也指向圆心一侧,有利于颗粒进入凹槽。按照图中所示的坐标系,颗粒的受力方程如下:
直槽槽轮

外切槽槽轮

内切槽槽轮

所有槽轮
颗粒在单个凹槽内的受力分析表明,新设计的槽轮结构能够改变颗粒进入凹槽的运动状态,影响颗粒的排放。为了进一步验证槽轮优化是否达到无人机施肥的要求,还需进行排量的脉动性和准确性测试研究。
2 脉动仿真试验
离散元法(Discrete Element Method,DEM)能够模拟排肥过程中的颗粒运动,且模拟仿真的结果能够为结构优化和参数优选提供依据,故该方法在排肥器的研究中使用较多[19-20]。由于槽轮低速时排肥的脉动性较明显,对排肥效果的影响较大,且脉动的幅度和时间间隔参数较难通过实际测量获得,故本文拟采用离散元法对9种凹槽形状和列数不同的槽轮在低转速下的排肥过程进行仿真,提取脉动特征,通过两因素三水平的单因素试验研究凹槽形状和列数对排肥时的脉动性,从而优选出脉动性弱的槽轮。
2.1 仿真平台与方法
2.1.1 仿真平台设计
为了减少其他因素的干扰,对排肥器模型进行了简化。如图5所示,简化后的排肥器模型主要包含排肥器壳体和槽轮两个部分。为了尽可能减少仿真计算量,该计算域底部仅超出颗粒出口位置10 mm。设置在物料箱内部的颗粒工厂用于生成颗粒肥,为了避免仿真过程中出现物料不足的现象,该颗粒工厂设置在距离槽轮较远的物料箱顶部位置,且在颗粒填充后,再设置槽轮转动。
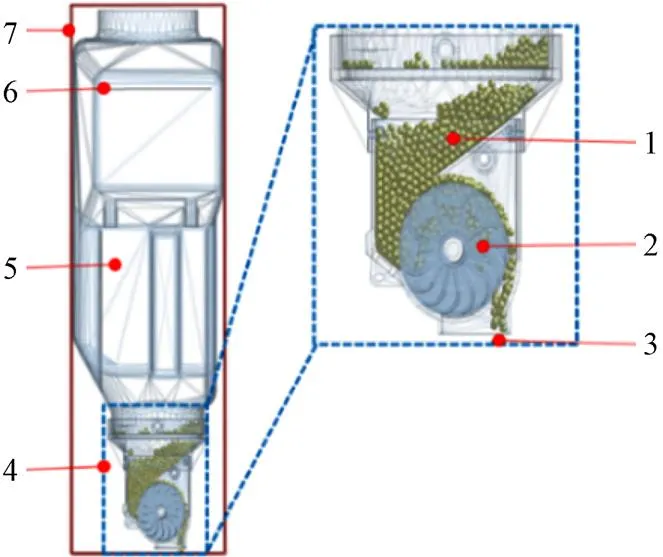
1.颗粒肥 2.槽轮 3.颗粒出口 4.排肥装置 5.物料箱 6.颗粒工厂 7.计算域
颗粒肥模型采用球粒模型[21],不考虑颗粒之间的粘结作用,采用EDEM中的Hertz-Mindlin(无滑动)模型作为接触模型[22]。颗粒肥物性参数按照尿素(含氮量≥ 46%)设置,平均直径实测值为1.98 mm。槽轮采用ABS工程材料加工,利用自制测试平台测定和参考相关文献[23-24]确定相关材料属性和接触力学参数,如表2所示。
颗粒工厂中颗粒生成方式为动态生成[25],每秒产生5 000个颗粒,颗粒下落速度为2.5 m/s,重力加速度为9.81 g/m2。当颗粒数达到一定程度后设置槽轮转动。时间步长设置为20%,仿真时间为12 s。
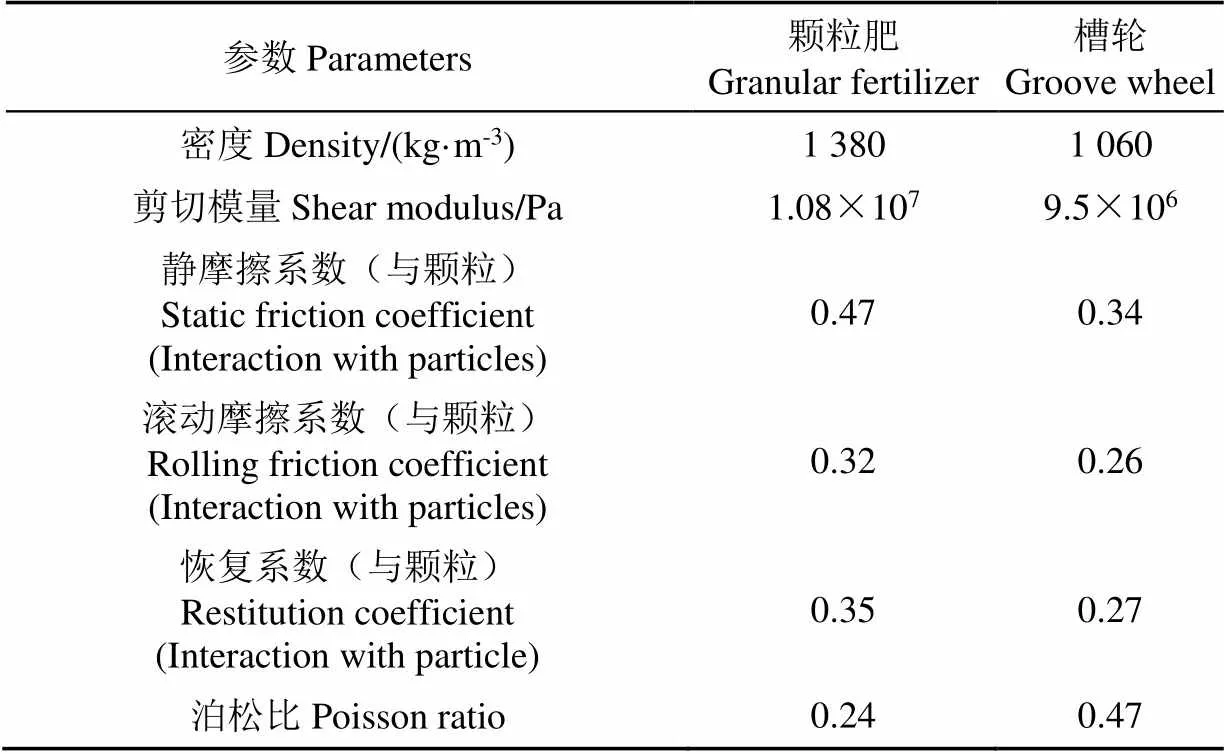
表2 离散元模型的材料和接触力学参数特性
2.1.2 仿真试验方法
为了更好地观察各槽轮排肥时的脉动现象,仿真测试设置3个转速水平:10、25和40 r/min。考虑到凹槽旋转到低于水平线即开始向外排肥,形成一定宽度的排肥区域,为了获得完整且准确的颗粒流瞬时排量,在槽轮底部竖直向下10 mm的位置设置圆柱形虚拟排量传感器网格,用于检测颗粒的瞬时排量。如图6所示,该圆柱形网格顶部与槽轮相切,半径为50 mm(检测范围为100 mm,略大于槽轮长度),高度为10 mm(约为槽轮半径的1/3),检测时间间隔为0.01 s,检测精度为0.001 kg/s。统计每个槽轮在不同转速下仿真时的瞬时排量,用脉动的幅度和时间间隔描述该脉动现象。脉动的幅度是指瞬时排量的最大值与最小值之间的差值,在槽轮转动的过程中,凹槽内的颗粒刚开始下落时的排量较小,随着槽轮的转动,该凹槽内的颗粒受力发生变化,容易滑落,排量增大。脉动的幅度越大,排量越不均匀。时间间隔是指相邻2次瞬时排量的最大值与最小值出现时对应的时间差,时间间隔越大,脉动越明显,越容易造成漏施。脉动的幅度和时间间隔的计算公式如下:
2.2 结果与分析
2.2.1 瞬时排量
各槽轮在不同转速下的瞬时排量如表3所示。从表中可以看出,所有槽轮的瞬时排量最大值和最小值均随转速的增大而增大。当转速为10 r/min时,直槽槽轮的排量最大值高于外切槽和内切槽槽轮,最小值低于其余2种槽轮。随着转速的增大,直槽槽轮与其余2种槽轮的排量最大值和最小值的差异有所增大。当转速为40 r/min时,直槽槽轮排量最大值与最小值与其余2种槽轮的差值达到最大,排量最大值相差0.094 kg/s,排量最小值相差0.032 kg/s。
2.2.2 脉动幅度和时间间隔
脉动幅度如图7a所示。从图中可以看出,所有槽轮的脉动幅度均随转速的增大而增大,且直槽槽轮的脉动幅度的增量高于其余2种槽轮。当转速为10 r/min时,各槽轮的脉动幅度波动较小,波动范围为0.046~0.077 kg/s。对于直槽,当转速较高时,凹槽列数对脉动幅度的影响较大,随着列数的增加,脉动幅度显著降低,整体上直槽6列的脉动幅度在被测转速范围内的差值最小,为0.112 kg/s。对于外切槽,各列槽轮的脉动幅度随转速的增大而增大,但整体的差异较小,最大为0.071 kg/s。对于内切槽,随着凹槽列数的增大,脉动幅度并无明显变化规律,但整体上的脉动幅度变化范围略高于外切槽,最大为0.086 kg/s。总体上,直槽槽轮对脉动幅度的影响最大,外切6列、内切4列和内切6列的影响次之,外切4列、外切5列和内切5列的影响最小。
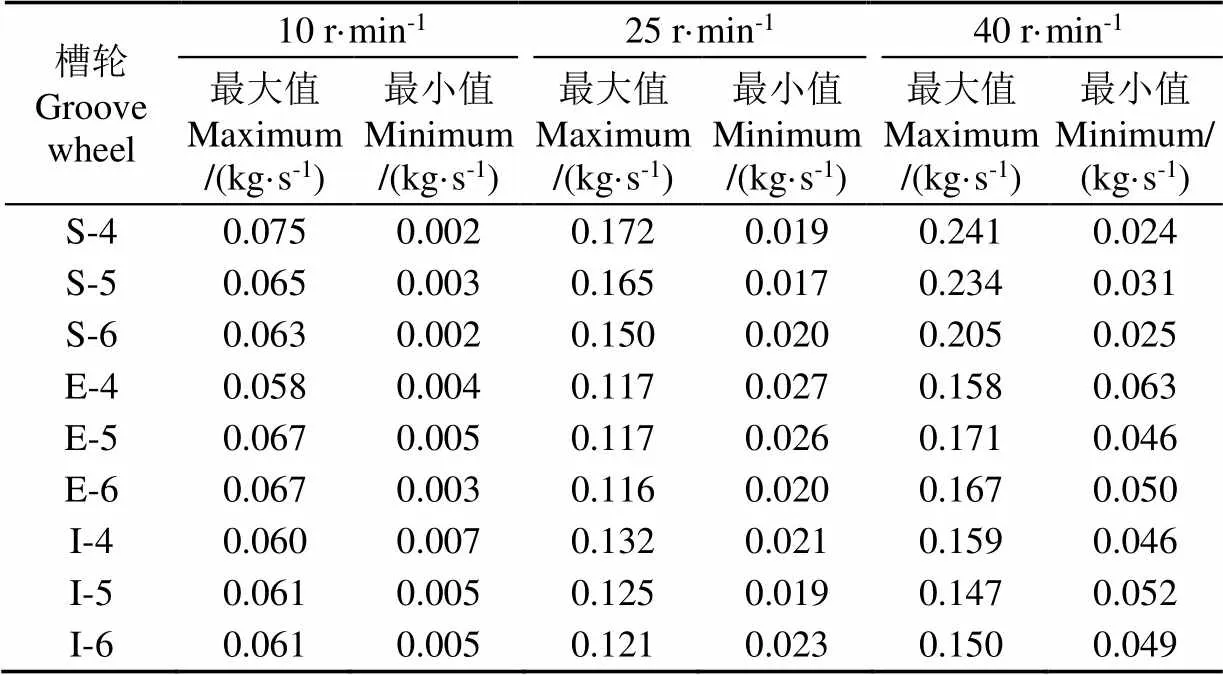
表3 所有槽轮在不同转速下模拟的瞬时排量
脉动时间间隔如图7b所示。从图中可以看出,除内切4列和外切4列槽轮外,所有槽轮的脉动时间间隔随转速的增大而减小。当转速为10 r/min时,直槽槽轮的脉动时间间隔均高于其他2种凹槽形状,脉动性最强。随着转速的增大,直槽与其余2种槽轮的脉动时间间隔差异减小。当转速为40 r/min时,所有槽轮的脉动时间间隔差异最小,为0.035 s。对于直槽槽轮,无论在何种转速下,凹槽列数的变化基本不会影响脉动时间间隔的变化。对于外切槽槽轮,当转速为10 r/min时,不同凹槽列数的脉动时间间隔差异较大,4列时的时间间隔最小,比最大值(E-5)小0.11 s;当转速较高时,脉动时间间隔随着列数的增大变化较小,范围在0.130~0.148 s(转速为25 r/min)和0.090~0.096 s(转速为40 r/min)。对于内切槽槽轮,脉动时间间隔在转速为10 r/min时的变化与外切槽槽轮基本一致,4列槽轮的时间间隔最小,与最大值(I-5)小0.09 s;当转速较高时,脉动时间间隔随列数的增大产生的变化略高于外切槽槽轮,变化范围在0.107~0.133 s(转速为25 r/min)和0.095~0.110 s(转速为40 r/min)。总体上,直槽槽轮对脉动时间间隔的影响最大,外切5列、外切6列和内切5列的影响次之,外切4列、内切5列和内切6列的影响最小。
脉动幅度的大小由瞬时排量最大值和最小值决定,而瞬时排量在相同的采样频率下受到转速和槽轮结构的影响。当转速较低时,所有凹槽均有足够时间被颗粒充分填充,由于所有槽轮的容积比差异较小,因而得到的瞬时排量的最大值和最小值基本一致,脉动幅度也基本稳定在较低值。当转速增大,颗粒填充凹槽的频率增加,槽轮的瞬时排量的最大值和最小值会增高,脉动幅度也会增大。但由于直槽槽轮更容易囊入和排放颗粒肥,因而脉动幅度会增大,时间间隔会减小,瞬时排量呈现出高频振荡波形曲线,脉动性较强。随着凹槽列数的增加,颗粒肥的囊入口变小,会弱化直槽排肥齿的优势,降低瞬时排量最大值,进而降低脉动幅度。对于外切槽,末端的弧形结构能够确保颗粒不会轻易滑出凹槽,但同样也会在一定程度上影响颗粒排放效果,因而脉动幅度会随列数的增加呈现出先减后增的趋势,但整体差异较小,且脉动时间间隔随转速的增大基本稳定,说明外切槽能够降低脉动性。对于内切槽,末端直线段排肥齿与直槽槽轮类似,具有较容易囊入和排放颗粒肥的优势,且凹槽底部为圆弧,有利于储存颗粒,但偏心的排肥齿和弧形的储存空间也会影响颗粒顺利离开凹槽,影响凹槽的排空率,因此,脉动幅度随列数的增加并无明显变化规律,且脉动时间间隔较小,说明内切槽能够降低脉动性。
3 排量测试试验
排量测试的目的是研究各槽轮的排量范围和排肥准确性。由于槽轮式排肥器采用强制排肥方式,对颗粒排放的约束性较强,可显著改善颗粒自由滑落现象,且主要通过控制转速调节排量,故采用台架试验测试排量是可行的。施肥无人机需要较大的排量范围,且当槽轮的转速较高时脉动现象会减弱,影响较小,为了对比各槽轮的排量较大值,台架试验选择在较高的转速范围内进行。
3.1 材料与方法
3.1.1 测试物料
本文选择尿素和复合肥2种不同形状和大小的颗粒肥料为试验对象。相关物理特性的测量结果如表4所示。
3.1.2 评价指标
为了准确评估排肥器优化后的排肥性能,综合考虑凹槽形状和列数2个因素对颗粒肥填充效果的影响,根据农业机械设计手册[26]中对外槽轮排肥器的性能要求,本文在台架测试中选择排量的准确性作为评价指标。
排量是指槽轮排肥过程中每分钟下落的颗粒物料的质量。排肥的准确性用各槽轮在不同的转速下实际排量之间的变异系数(Coefficient of Variation,CV)表示,变异系数越小,所测槽轮在该处理下的排量误差越小,排量准确性越好,变异系数CV(%)的计算公式如下:
其中
3.1.3 试验方法
利用3D打印(为了减少材质对排肥效果的影响,所用材料与前期物理特性测试时的一致)制作排肥器样机并进行台架试验。如图8所示,测试时,首先在物料箱内装入一定量的被测物料(超过物料箱容积的2/3),设定槽轮的转速值,然后控制电机驱动器在设定的转速下持续转动30 s,记录排出的颗粒物料的重量并换算成每分钟的排量(kg/min)。前期仿真结果表明当转速为40 r/min时的脉动明显减弱。为了减少脉动的干扰,获得准确的排量范围和准确性测试结果,本次试验中设置转速最低为40 r/min,共5个水平(分别为40、60、80、100和120 r/min),各处理重复5次。测试所用仪器物品包括:步进电机控制器、步进电机驱动器、电子秤(称量范围30 kg,精度0.01 g,深圳市安衡衡器电子有限公司)、尼龙纱网带、塑料桶、计时器等。
3.2 结果与分析
3.2.1 各槽轮排量范围
所有槽轮的排量测试结果如图9所示。由图9可知,所有槽轮的排量均随转速的增大而增大,且同一转速下,凹槽列数较少的槽轮排量较大。测试转速范围内,所有槽轮的最大排量差异较大,最小排量差异较小。各槽轮排放复合肥时的最大排量范围为17.905 kg/min(直槽6列)~36.314 kg/min(直槽4列);排放尿素时的最大排量范围为17.322 kg/min(直槽6列)~24.390 kg/min(直槽5列)。基本都能满足无人机施肥对排量的要求。
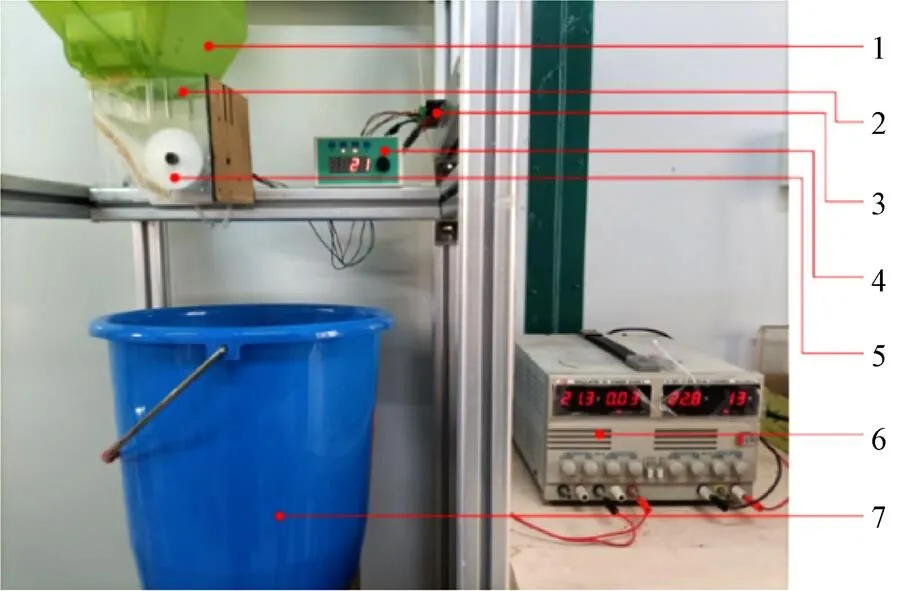
1.物料箱 2.排肥器壳体 3.电机驱动器 4.电子调速器 5.槽轮 6.开关电源 7.接料桶
3.2.2 各槽轮排量准确性
各槽轮的排量差异分析结果如表5和表6所示,从表5中可以看出,对于复合肥,直槽4列、直槽5列和内切5列槽轮的变异系数分别在转速为60、80和60 r/min时高于3%,与其他转速下的变异系数相差较大,波动范围和随机性均较大;外切6列、直槽6列和外切5列槽轮的变异系数波动最小,基本稳定在1%以内;内切4列、内切6列和外切4列槽轮的变异系数波动范围稍大,但均在3%以内。从表6中可以看出,对于尿素,内切4列和直槽4列的变异系数分别在转速为60 r/min和40 r/min时高于3%,与其他转速下的变异系数相差较大,排量不稳定,准确性较差。其余槽轮的变异系数均在3%以下,其中,内切6列和直槽6列槽轮的变异系数波动较小,基本稳定在1%以内;直槽5列、内切5列、外切4列、外切5列和外切6列槽轮的变异系数波动范围基本在1%~2%;且无论直槽、外切槽还是内切槽,所有槽轮的排量变异系数波动范围随着凹槽列数的增加而降低。
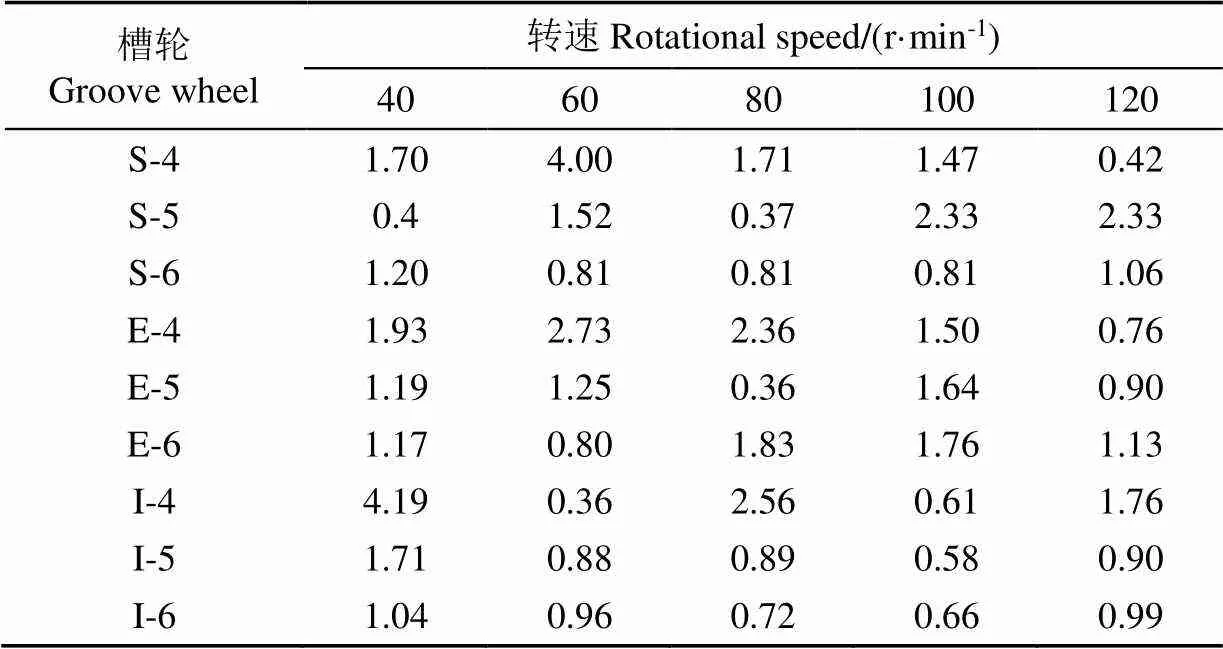
表6 不同转速下排放尿素的排量变异系数
如前所述,对于肥料颗粒,转速的增大使得单位时间内能够进入凹槽的肥量增大,因而各槽轮的排量也会增大。但各槽轮的填充能力和容积不同,实际进入凹槽的肥量差异较大,因而排量增大的幅度有所不同,但排量范围均满足无人机施肥对排量的要求。且对于直槽槽轮,凹槽列数较小时,颗粒进出凹槽相对容易,转速的变化对于颗粒的填充有较大影响,因而产生的排量变异系数波动范围较大。
利用统计分析软件SPSS分析槽轮结构对排量的影响,结果如表7和表8所示。从表中可以看出,对于复合肥和尿素,凹槽形状、列数和转速的主效应及其交互作用均显著(<0.05)。方差分析的结果与测试试验的结果是一致的,各槽轮的凹槽形状和列数在不同转速下对排量的影响程度有差异。由于改变了凹槽形状和列数,相应的凹槽槽轮对颗粒肥的作用力也发生改变。直槽槽轮的排肥齿为直线型,对颗粒的支持力指向槽轮中心,方便填充,因而影响较显著。4列槽轮的单圈凹槽数目较少,在凹槽容积一定的情况下,填充空间相对较大,因而显著性最高。随着转速的增大,各槽轮的填充率基本达到极限,不同转速下的排量差异较小,显著性降低。上述结论进一步表明台架试验的测试结果与不同的槽轮对颗粒运动的作用效果是一致的,能够用于槽轮结构参数的优选。
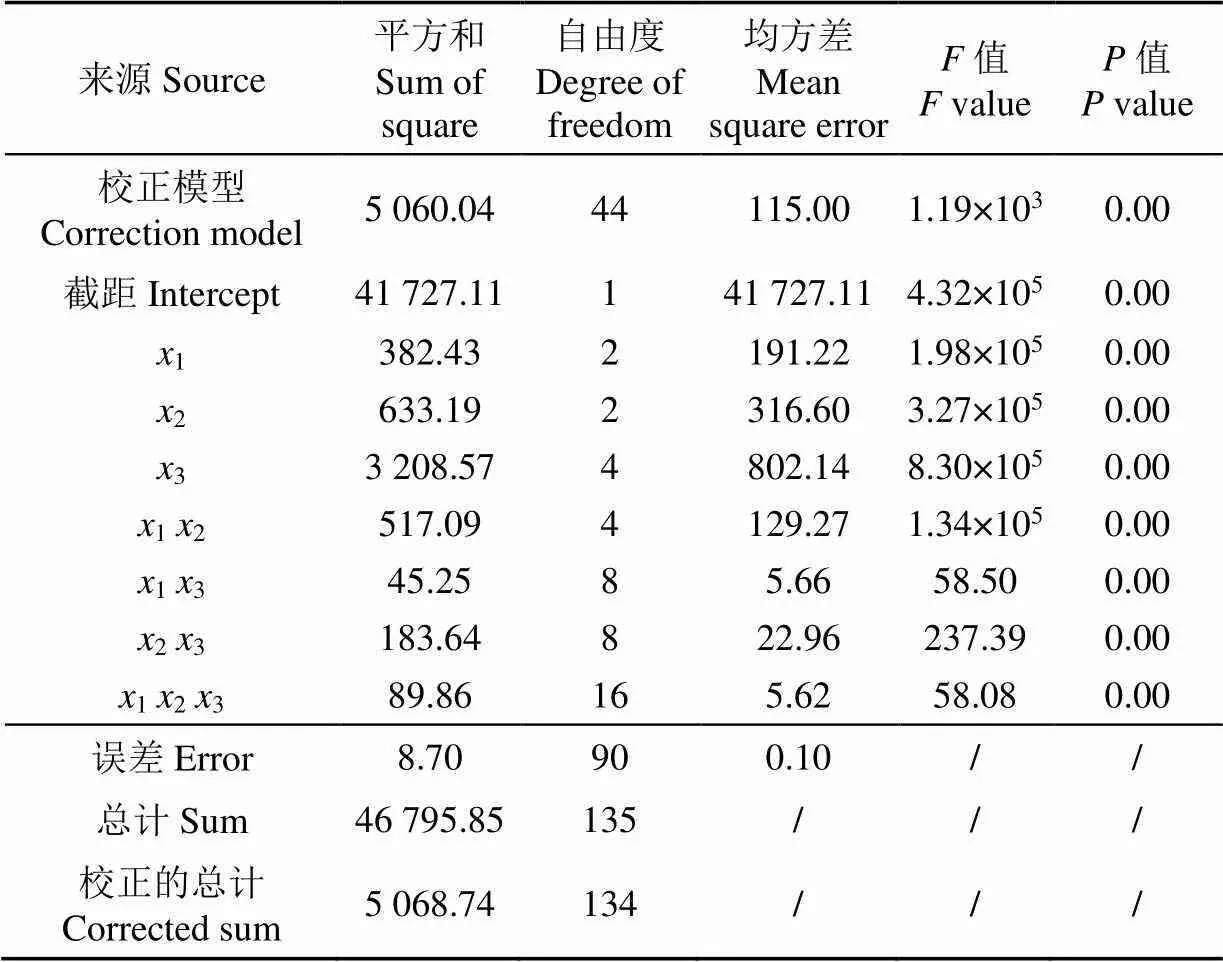
表7 排放复合肥时影响因素主体间效应的检验结果
注:1表示凹槽形状,2表示凹槽列数,3表示槽轮转速。
Note:1represents groove shape,2represents groove column,3represents rotational speed.
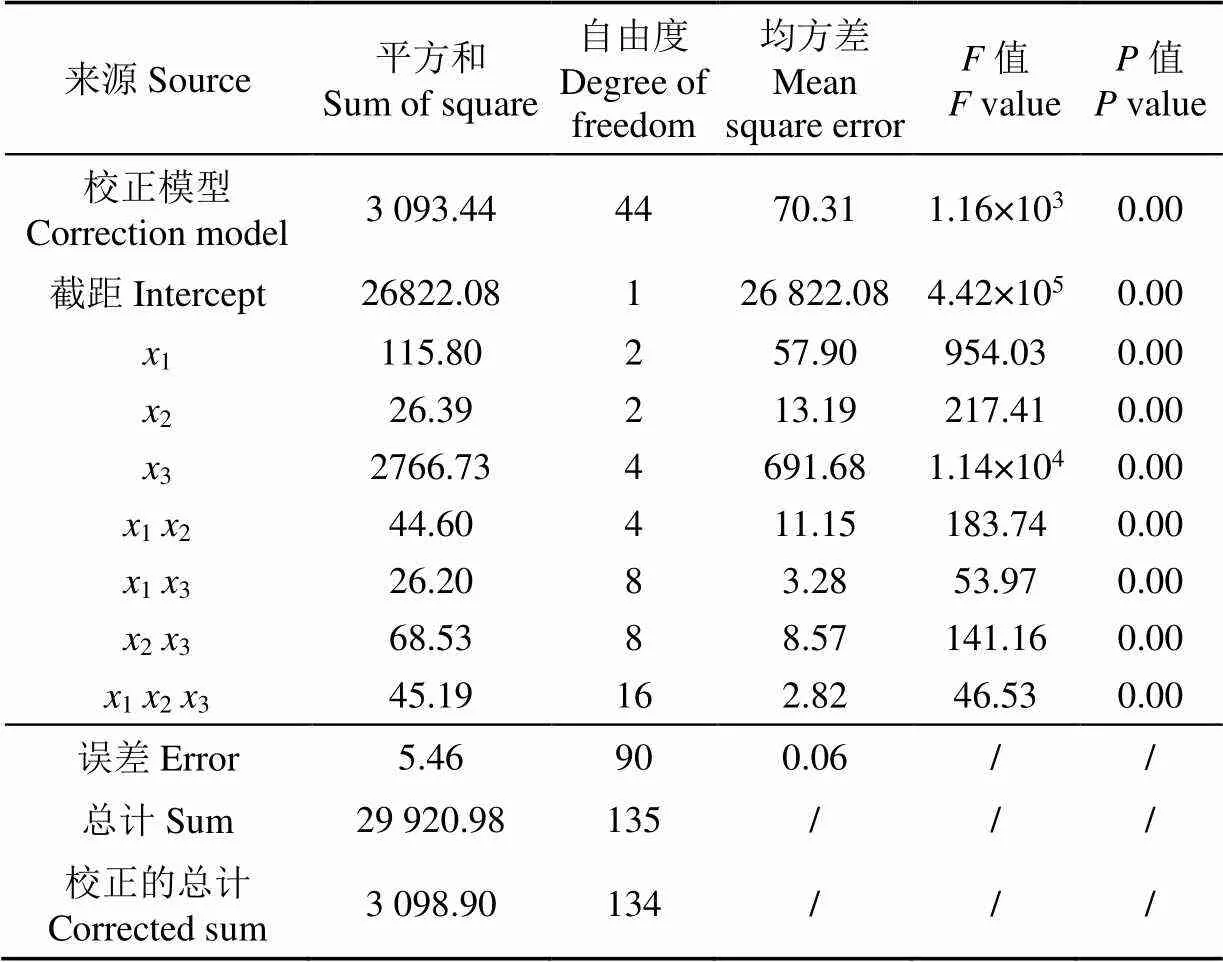
表8 排放尿素时影响因素主体间效应的检验结果
综上,凹槽截面形状和列数对槽轮的排量范围和准确性会产生一定影响,且在不同转速下的影响程度有差异。槽轮式排肥器通过改变转速实现排量变化,且实际作业时转速大小由需肥量决定。为了更好地发挥施肥无人机槽轮式排肥器的优势,需在不同转速范围内选择受转速影响较小的槽轮结构以确保排量范围和排肥准确性。
4 结 论
1)在初代施肥无人机排肥器基础上优化设计了可插拔的便携式排肥器。通过对颗粒肥在槽轮凹槽中的运动过程进行理论分析,设计了几种凹槽截面形状和列数不同的槽轮。
2)利用EDEM仿真软件搭建了槽轮排肥器的离散元仿真平台,进行了凹槽截面形状和列数因素影响下槽轮在低转速下排肥时的脉动特性研究。仿真结果表明,凹槽截面形状和列数对排量脉动性的影响较大,且当转速增大时,排量会相应增大,导致脉动的幅度增大,而时间间隔减小。直槽槽轮的脉动幅度和时间间隔均高于内切槽和外切槽槽轮,脉动性较大。外切4列和内切5列槽轮随转速变化对脉动幅度和时间间隔的影响较小,脉动较弱,连续性较好。
3)利用台架试验测试并分析了各槽轮在转速为40~120 r/min时的排量范围和准确性。试验结果表明,各槽轮在高转速下的最大排量均在17 kg/min以上,均随转速的增大而增大,满足施肥无人机对较大的排量可控范围的需求。对于复合肥,直槽4列、直槽5列和内切5列槽轮的变异系数最大值高于3%,波动较大,其余槽轮的变异系数均低于3%,且波动范围较小,排量准确性高。对于尿素,内切4列和直槽4列的变异系数最大值高于3%,且波动范围较大,其余槽轮的变异系数均低于3%,且波动范围较小,排量准确性高。相关性和方差分析结果表明,凹槽形状和凹槽列数在不同转速下的主效应和交互作用均对槽轮排量产生显著影响。
施肥无人机低空高速追肥时,既要在施肥量较小时达到均匀和连续,又要在施肥量较大时及时达到所需的排量,避免漏施,对排量范围和低转速下的排量连续性要求较高。本文在脉动仿真试验和台架测试试验基础上,综合考虑低转速下的排量脉动性和高转速下的排量准确性给出以下建议:对于复合肥,可选择外切4列槽轮,对于尿素,可选择外切4列和内切5列槽轮。
[1] Zhang C, Kovacs J M. The application of small unmanned aerial systems for precision agriculture: A review[J]. Precision Agriculture, 2012, 13(6): 693-712.
[2] Cai G, Dias J, Seneviratne L. A survey of small-scale unmanned aerial vehicles: Recent advances and future development trends[J]. Unmanned System, 2014, 2(2): 1-26.
[3] 周志艳,明锐,臧禹,等. 中国农业航空发展现状及对策建议[J]. 农业工程学报,2017,33(20):1-13.
Zhou Zhiyan, Ming Rui, Zang Yu, et al. Development status and countermeasures of agricultural aviation in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 1-13. (in Chinese with English abstract)
[4] 吴爱兵,朱德文,赵国栋. 我国固态肥料施肥机械现状及发展对策[J]. 农业开发与装备,2014(2):27-28.
[5] 宋灿灿,周志艳,姜锐,等. 气力式无人机水稻撒播装置的设计与参数优化[J]. 农业工程学报,2018,34(6):80-88.
Song Cancan, Zhou Zhiyan, Jiang Rui, et al. Design and parameter optimization of pneumatic rice sowing device for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(6): 80-88. (in Chinese with English abstract)
[6] Latif M A. An agricultural perspective on flying sensors: state of the art, challenges, and future directions[J]. IEEE Geoscience and Remote Sensing Magazine, 2018, 6(4): 10-22.
[7] Zeng S, Tan Y, Wang Y, et al. Structural design and parameter determination for groove-roller fertilizer applicator[J]. International Journal of Agricultural and Biological Engineering, 2020, 13(2): 101-110.
[8] Su N, Xu T, Song L, et al. Variable rate fertilization system with adjustable active feed-roll length[J]. International Journal of Agricultural and Biological Engineering, 2015, 8(4): 19.
[9] 汪博涛,白璐,丁尚鹏,等. 外槽轮排肥器关键工作参数对排肥量影响的仿真与试验研究[J]. 中国农机化学报,2017,38(10):1-6.
Wang Botao, Bai Lu, Ding Shangpeng, et al. Simulation and experimental study on impact of groove-roller fertilizer key parameters on fertilizer amount[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(10): 1-6. (in Chinese with English abstract)
[10] 孟志军,王秀,赵春江,等. 基于嵌入式组件技术的精准农业农田信息采集系统的设计与实现[J]. 农业工程学报,2005,21(4):91-96.
Meng Zhijun, Wang Xiu, Zhao Chunjiang, et al. Development of field information collection system based on embedded COM-GIS and pocket PC for precision agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(4): 91-96. (in Chinese with English abstract)
[11] Song C, Zhou Z, Zang Y, et al. Variable-rate control system for UAV-based granular fertilizer spreader[J]. Computers and Electronics in Agriculture, 2021, 180: 105832.
[12] 齐兴源,周志艳,杨程,等. 稻田气力式变量施肥机关键部件的设计与试验[J]. 农业工程学报,2016,32(6):20-26.
Qi Xingyuan, Zhou Zhiyan, Yang Cheng, et al. Design and experiment of key parts of pneumatic variable-rate fertilizer applicator for rice production[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(6): 20-26. (in Chinese with English abstract)
[13] 刘春波,臧英,罗锡文,等. 水稻直播机螺旋槽轮排种器设计与试验[J]. 沈阳农业大学学报,2016,47(6):734-739.
Liu Chunbo, Zang Ying, Luo Xiwen, et al. Design and experiment of spiral grooved wheel for rice direct seeding machine[J]. Journal of Shenyang Agricultural University, 2016, 47(6): 734-739. (in Chinese with English abstract)
[14] Bagiñski T. Influence of selected factors on irregularity of spring barley seeds dosage using the press drill seeder[J]. Technical Science, 2006, 9: 6-12.
[15] 张明华,王在满,罗锡文,等. 组合型孔排种器双充种室结构对充种性能的影响[J]. 农业工程学报,2018,34(12):8-15.
Zhang Minghua, Wang Zaiman, Luo Xiwen, et al. Effect of double seed-filling chamber structure of combined type-hole metering device on filling properties[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 8-15. (in Chinese with English abstract)
[16] 祝清震,武广伟,陈立平,等. 槽轮结构参数对直槽轮式排肥器排肥性能的影响[J]. 农业工程学报,2018,34(18):12-20.
Zhu Qingzhen, Wu Guangwei, Chen Liping, et al. Influences of structure parameters of straight flute wheel on fertilizing performance of fertilizer apparatus[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 12-20. (in Chinese with English abstract)
[17] 王永梅,杨宛章,王希贵. 螺旋槽轮式排种器的研究[J]. 新疆农业大学学报,2006,29(1):67-70.
Wang Yongmei, Yang Wanzhang, Wang Xigui. Study on row sowing device with spiral shave[J]. Joural of Xinjiang Agricultural University, 2006, 29(1): 67-70. (in Chinese with English abstract)
[18] 王在满,黄逸春,王宝龙,等. 播量无级调节水稻精量排种装置设计与试验[J]. 农业工程学报,2018,34(11):9-16.
Wang Zaiman, Huang Yichun, Wang Baolong, et al. Design and experiment of rice precision metering device with sowing amountstepless adjusting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 9-16. (in Chinese with English abstract)
[19] Van L P, Tijskens E, Ramon H. Discrete element simulations of the influence of fertiliser physical properties on the spread pattern from spinning disc spreaders[J]. Biosystems Engineering, 2009, 102(4): 392-405.
[20] Lv H, Yu J, Fu H. Simulation of the operation of a fertilizer spreader based on an outer groove wheel using a discrete element method[J]. Mathematical and Computer Modelling, 2013, 58(3-4): 842-851.
[21] Horabik J, Molenda M. Parameters and contact models for DEM simulations of agricultural granular materials: A review[J]. Biosystems Engineering, 2016, 147: 206-225.
[22] Marcinkiewicz J, Selech J, Staszak Ż, et al. DEM simulation research of selected sowing unit elements used in a mechanical seeding drill[J]. MATEC Web of Conferences, 2019, 254: 02021.
[23] 刘彩玲,黎艳妮,宋建农,等. 基于EDEM的离心甩盘撒肥器性能分析与试验[J]. 农业工程学报,2017,33(14):32-39.
Liu Cailing, Li Yanni, Song Jiannong, et al. Performance analysis and experiment on fertilizer spreader with centrifugal swing disk based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(14): 32-39. (in Chinese with English abstract)
[24] 孟德兴. 肥料颗粒动力学特性仿真及槽轮式配肥机的优化设计[D].泰安:山东农业大学,2007.
Meng Dexing. Simulation of Dynamic Characteristics of Fertilizer Granules and Optimization Design of Slot Type Fertilizer Distributor[D]. Tai’an: Shandong Agricultural University, 2007. (in Chinese with English abstract)
[25] Dintwa E, Tijskens E, Olieslagers R, et al. Calibration of a spinning disc spreader simulation model for accurate site-specific fertiliser application[J]. Biosystems Engineering, 2004, 88(1): 49-62.
[26] 中国农业机械化科学研究院. 农业机械设计手册(上下册)[M]. 北京:中国农业科学技术出版社,2007.
宋灿灿,周志艳,王国宾,等. 施肥无人机槽轮式排肥器槽轮结构参数优选[J]. 农业工程学报,2021,37(22):1-10. doi:10.11975/j.issn.1002-6819.2021.22.001 http://www.tcsae.org
Song Cancan, Zhou Zhiyan, Wang Guobin, et al. Optimization of the groove wheel structural parameters of UAV-based fertilizer apparatus[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(22): 1-10. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.22.001 http://www.tcsae.org
Optimization of the groove wheel structural parameters of UAV-based fertilizer apparatus
Song Cancan1, Zhou Zhiyan2,3, Wang Guobin1, Wang Xunwei2,3, Zang Ying2,3※
(1.,,255049,;2.,/(),510642,;3.(-),510642,)
Agricultural spraying unmanned aerial vehicles (UAVs) have been emerging to promote mechanized fertilization in recent years. A fertilizer discharging device is one of the most important components in the fertilization machinery. Among them, a groove wheel-type fertilizer discharging device has been widely used, due to the simple structure and the adjustable range of displacement. However, the large fluctuation and low displacement accuracy often occur during fertilizer discharging of groove wheel type fertilizer discharging device for the fertilizing UAV. Harsh requirements also remain on the structure design and installation position of the fertilizer discharging device, where the fertilizing UAV has a small size and limited payload. Therefore, it is of great significance to explore the new groove wheel-type fertilizer discharging device. This study aims to design the groove wheels with different groove shapes and columns, thereby clarifying the interaction between the particles and the groove in a UAV-based fertilizer. A simulation software EDEM was also selected to optimize the fertilizer discharge process of each groove wheel at different rotational speeds. An analysis was then made to determine the influence of groove shape and columns number on the pulsation of fertilizer discharge from the perspective of the amplitude and time interval. The simulation results showed that when the rotational speed was 10-40 r/min, the groove shape and column presented a great influence on the pulsation of the fertilizer discharge, where the amplitude of the pulsation increased, whereas, the time interval decreased, as the rotational speed increased. There was an outstandingly larger pulsation of the groove wheel with the straight groove, compared with the other two kinds of groove wheel. A bench test was conducted to investigate the displacement range of compound fertilizer and urea discharged by each groove wheel, further to determine the accuracy of displacement and the interaction of each influencing factor on the displacement. The test results showed that when the rotational speed was 40-120 r/min, the discharge of the two fertilizers within the speed range of each groove wheel was more than 17 kg/min, meeting the discharge requirements of the fertilizing UAV. The analysis of variance showed that the main effect and interaction of groove shape and column posed a significant influence on the displacement at different rotational speeds (<0.05), and interfered by rotational speed. In a compound fertilizer, the CVs of the groove wheels E-6, S-6, and E-5 fluctuated smoothly, basically within 1%; the CVs of the groove wheels I-4, I-6, and E-4 fluctuated in a large range, but all within 3%. In the urea, the CVs of the groove wheels I-4 and S-4 fluctuated in a large range, indicating a low accuracy of discharge rate; the CVs of the groove wheels S-5, I-5, E-4, E-5, and E-6 fluctuated within 1%-2%. An optimal fertilizer discharge was achieved at different speeds, considering the discharge pulsation at a low speed and the discharge accuracy at a high speed for the fertilizing UAV. Correspondingly, it was suggested that the E-4 groove wheel can be used for the discharging compound fertilizer, and the E-4 or I-5 groove wheels for discharging urea. Consequently, the structural parameters of the groove wheel in the fertilizer discharging device were optimized to achieve the optimal combination of small pulsation, as well as the accurate and stable discharge of fertilizer. The finding can provide a strong reference to optimize the performance of fertilizer discharging devices in the UAV agricultural spraying system.
unmanned aerial vehicles; discrete element method; groove wheel optimization; pulsation; fertilizer discharging apparatus; granular fertilizer
2021-09-06
2021-11-05
2020广东省乡村振兴战略专项(2020KJ261);广东省科技计划项目(2021B1212040009);山东省引进顶尖人才“一事一议”专项经费资助项目(鲁政办字[2018]27号)
宋灿灿,博士,讲师,研究方向为农用无人机撒播与施肥技术。Email:songcc@sdut.edu.cn
臧英,博士,教授,研究方向为水稻生产机械关键技术与装备。Email:yingzang@scau.edu.cn
10.11975/j.issn.1002-6819.2021.22.001
S252.2
A
1002-6819(2021)-22-0001-10
中国农业工程学会高级会员(E041200443S)