基于机器视觉的固体发动机摆动喷管空间位姿的实时测量技术*
2021-02-16林新东钟织富毕浩然梅天灿仲思东
林新东,冉 冲,钟织富,孟 浩,毕浩然,梅天灿,仲思东,2
(1.武汉大学 电子信息学院,武汉 430079;2.测绘遥感信息工程国家重点实验室,武汉 430079;3.湖北三江航天江北机械工程有限公司,孝感 432000)
0 引言
固体发动机摆动喷管的空间位姿测量是测试矢量发动机性能的重要步骤之一,为发动机的研究和设计提供了可靠的数据,对火箭飞行姿态和发动机推力矢量的控制具有重要意义[1-2]。目前,国内外对固体发动机摆动喷管运动参数测量的研究较少,且现有的摆动喷管空间位姿测量技术由于缺乏针对性的专用设备,实际操作起来较为困难,无法满足喷管的实际测量要求[3]。
SEELY等[4]介绍了一种喷管摆角激光测量系统,该测量方案使用了激光二极管和位移敏感探测器,但是并未给出具体的摆角测量方法。针对固体火箭喷管的摆心偏移等问题,DONAT[5]进行了深入的研究。文献[6]对喷管摆角测量的不确定度进行了分析,指出摆角标定精度对测量精度影响最大。后续马新宇等[7]提出了一种集高精度零位杆、位移传感器、采集器等一体的喷管摆角测量方案,该方案虽然能够通过电脑操纵即可完成测量,但是依旧存在接触式测量效率低、测量精度受测量头精度影响、测量一致性差等缺点。文献[8]提出了一套基于双目视觉的火箭喷管运动姿态测量系统,根据基于双截面的喷管摆心测量方法和基于投影的喷管摆角测量方法来确定摆心和摆角。此方案繁琐之处在于每次测量之前都需要调整双目相机系统的位置并完成标定,而且不能同步数据采集。文献[9]提出的红外光电探测方案通过红外LED发光板和装有红外滤光片的高速相机来完成喷管表面大量目标物三维坐标的测定,通过圆锥曲面拟合得到喷管轴线,以大量瞬时转轴拟合得到摆动轴,将喷管轴线和摆动轴的公垂线与轴线的交点作为摆心,并且实现了同步数据采集。
基于机器视觉的测量方案越来越多地应用于发动机摆动喷管空间位姿测量[10]。机器视觉方案通过使用摄像机拍摄被测目标的单帧或序列图像,然后利用图像处理、图像分析等技术来测量目标的结构参数。视觉测量属于非接触测量范畴,在测量过程中对目标没有影响,可以在复杂环境下工作。因此,它适用于动态目标的结构参数和运动状态的测量,具有较高的测量精度和可靠性[11]。
本文提出了一种基于摄影测量+机器视觉的实时测量方案。首先,确定视觉测量系统坐标系与喷管运动坐标系之间的转换关系,采用单目相机对靶标实时成像,得到靶标运动轨迹。由于靶标是人为设定好的,因此可以根据后续的图像处理情况以及定位跟踪情况,对靶标进行调整,直至满足要求。然后,对靶标的运动轨迹进行曲线(面)拟合,采用截面法得到摆动喷管的瞬时摆轴。最后,建立喷管摆动瞬时轴线和摆心、摆角的计算模型,实现摆动喷管运动参数的测量。
1 摆动喷管位姿测量系统结构
1.1 喷管位姿测量总体方案
在摆动喷管和驱动摆杆上放置靶标物——靶标1和靶标2,理想中的靶标放置位置应在驱动摆杆所在的中心参考摆动轴线上,如图1所示。在喷管和驱动摆杆运动的同时,使用单目相机对靶标进行实时成像,通过数字图像处理技术,如二值化、轮廓提取等,对靶标进行定位与跟踪,计算出两个靶标的三维位移,即得到驱动摆杆和喷管的三维运动轨迹。
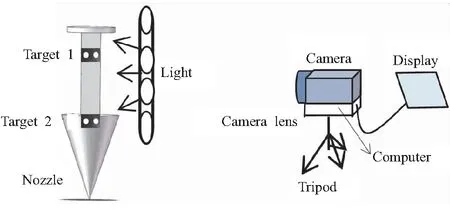
图1 整体测量方案硬件组成
柔性接头在受压情况下,由于弹性材料会反生应变,其摆心在摆动过程当中有一定的漂移。漂移程度和压强、摆角大小等因素有关,这种现象称为摆心漂移[12]。基于上述理论,对火箭喷管摆心和摆角的测量均离不开对喷管轴线的准确定位。本文通过对靶标运动轨迹进行拟合,以相邻点连线的中垂线作为瞬时轴线,利用瞬时轴线过摆心这一特点,瞬时轴线两两相交的交点为摆心[13]。
1.2 单目视觉测量系统
式中k为比例系数;b为瞬时轴线与Zw轴截距,为常数项。

图2 靶标示意图
本测量方案依赖于单目视觉测量系统[14]。机器视觉测量通过镜头和相机实时完成对靶标图像的采集,并将采集的图像进行数字图像处理,得到靶标物的实时三维运动轨迹。
“‘万’就是要利用3年的时间服务1万户种植大户,这些大户包括家庭农场、农业专业合作社、公司化经营的种植基地,这是我们目标客户的调整。”杨福旺表示,对这些大户,天脊集团要进行更加精细化的服务措施,帮助这些大户节约成本,生产出高品质的农产品。
2 测量原理
为了进一步探究微滴包埋实验中碳纳米管纤维和树脂微滴之间的破坏机理,利用扫描电子显微镜对微滴发生滑移后的样品进行观察,SEM图如图5所示.在滑移后的微滴端部,可以清晰地看到被少量树脂包覆的碳纳米管.这一现象表明,在微滴样品制备过程中,树脂基体部分进入碳纳米管纤维的表面空隙中,致使微滴在滑移过程中将部分碳纳米管从纤维表面剥离.
2.1 单目视觉测量原理
相机成像原理可以简化为小孔成像。图3为小孔成像模型。
高中物理教师在进行学生探究的过程中,要抓住物理知识的本质规律,让学生的探究能力能够进一步的发展和提升,而不是在一些细节问题上进行来回的探讨,既浪费时间,也降低了学生的探究效率.注重知识本质,淡化细节问题,可以更有效的让学生掌握物理知识的关键点,从而提升学生的探究能力和创新能力,达到高效教学的目的.
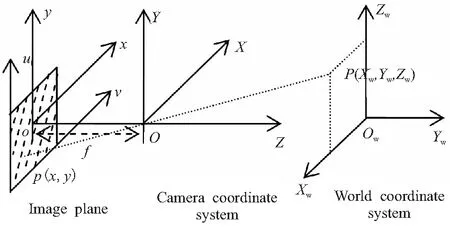
图3 小孔成像模型
其中,(o-uv)为以像素为单位的坐标系,o为像平面中心点即为图像主点;(o-xy)以图像主点o为原点,以mm为单位建立的图像坐标系;(O-XYZ)为相机坐标系,O为相机光心,Z轴与光轴重合,指向相机外侧;(O-XwYwZw)是世界坐标系。设靶标经相机成像在像平面上后的圆心距为l,靶标在光轴方向上的位移量为
(1)
式中Z为相机到靶标所在平面的距离;f为相机焦距;u为相机每个像素的尺寸;N为靶标图像的圆心距所占的像素个数。
本方案所使用的人为设置靶标可以针对不同的实验环境进行设计,在保证不影响被测主体的前提下,合理设计靶标可以有效提高测量效率和精度。
由于柔性接头的摆心并不固定,而是会受到压强、温度等环境因素的影响,摆心会漂移,因此更关注的是摆心集中分布的区间。在剔除偏离程度很大的异常点之后,得到x、z两个方向上的频数分布直方图,如图9所示。本文做了量化统计,统计了90%的点落在的区间为:x∈[-0.6,0.7],z∈[-289.8,-276.2](单位:mm)。
喷管摆动过程中,某一时刻t采集的图像与起始时刻t0采集的图像中,靶标在像平面上的位移量在(o-xy)图像坐标系下为Δx和Δy,在世界坐标系(O-XwYwZw)下的位移量为ΔX和ΔY,则有如下对应关系:
(2)
建立以t0时刻靶标初始点为原点的世界坐标系,由式(1)、式(2)可以测量出靶标在三个坐标轴的方向上的位移量,得到了t时刻靶标的世界坐标。
测量原理包括单目视觉测量原理和固体发动机摆动喷管瞬时轴线测量原理。
2.2 喷管轴线测量原理
火箭喷管围绕摆心摆动,且任意时刻的瞬时轴线过摆心。将靶标放置在驱动摆杆上,使用伺服液压作动器使驱动摆杆带动喷管在平面周期摆动,其摆动示意图如图4所示。
目前,公认具有这一能力的姑娘是信小呆。上一个这样的平民女神还是杨超越。穷苦出身,唱跳欠佳,却能依靠粉丝投票在选秀中名列前茅。于是,被网友奉为“躺赢”的锦鲤,好运的象征。
5.7.3 呼吸困难 进行膈神经移位术后要严密观察呼吸情况并进行氧饱和度的监测。呼吸困难严重时可使用正压呼吸机辅助通气,加强腹式呼吸训练,刺激神经恢复,逐渐脱机恢复自主呼吸。
(Xi-X0)Z+(Z0-Zi)X+X0(Zi-Z0)+Z0(X0-Xi)=0
(3)

图4 喷管平面周期摆动
由ti和ti+1时刻求得的瞬时摆轴满足以下公式:
木犀草素·4,4′-联吡啶药物共晶对小鼠巨噬细胞RAW264.7的抗炎作用研究 ……………………………… 刘立新等(5):602
(4)
本文主要针对柔性喷管在不同压强下周期摆动的可靠性测试,图2为人为设置的靶标示意图,圆直径d和圆心距D已知。
喷管周期摆动时,以起始点t0=0时刻靶标位置为原点建立世界坐标系Ow-XwZw,使用单目视觉测量系统来确定靶标位置坐标。靶标在任意时刻ti(i≠0)的坐标设为(Xi,Zi),摆心坐标设为(X0,Z0)。则ti时刻的瞬时摆轴表达式为
系统通过录入河道等级、起讫点、长度基本信息,通过实时观测反馈闸站内外水位、雨量信息,以定位查看、查询详情,通过河道漂浮物和保洁船只的实时监控,整合现有保洁船GPS系统,实现对保洁船的统一管理,并对主要河道水质进行实时监测、现场监控和监测数据分析,合理有序调度河道保洁船只和河道自净工程设备进行河道保洁和水环境治理,实现河道及水源地的实时监测、实时预警、实时调度与应急处理。
实际情形中,喷管不止在一个平面内进行摆动,而是空间摆动。为解决喷管空间摆动时摆心摆角的测量问题,在喷管平面周期摆动测量的基础上,加装一个靶标物。其摆动示意图如图5所示。
靶标的理想位置应在驱动摆杆的中心参考摆动轴线上,在此情形中的任意时刻,两个靶标物的中心也即靶标上两圆圆心连线的中点,其连线必过摆心。但实际操作中,很难保证两个靶标的位置满足理想情形,可以采取“标定”的方法来消除靶标实际位置的偏差,也可以对两个靶标的三维运动数据分别进行“截面法”处理,以得到空间摆动情形下的摆心、摆角参数测量。
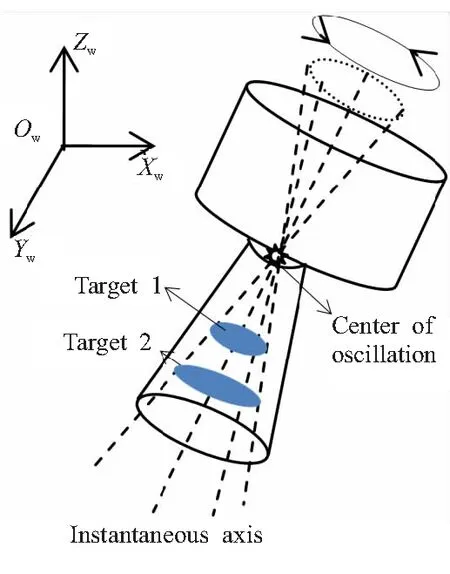
图5 喷管圆周摆动示意图
综上所述,利用单目视觉测量原理得到靶标的实时三维运动轨迹,通过摆动喷管轴线测量原理从运动轨迹中确定摆动喷管的瞬时轴线,最后建立喷管瞬时轴线与摆心、摆角的计算模型,计算得到喷管的空间运动参数。
3 实验验证与结果分析
3.1 实验设备及实验环境
为了验证本方案的有效性,进行了实地试验。实验设备包括单目视觉测量系统实验设备和控制摆杆及喷管摆动的实验平台。图6给出了喷管运动视觉测量系统的示意图,图中用机械臂代替了实地实验中控制喷管摆动的摆动测试工业平台。
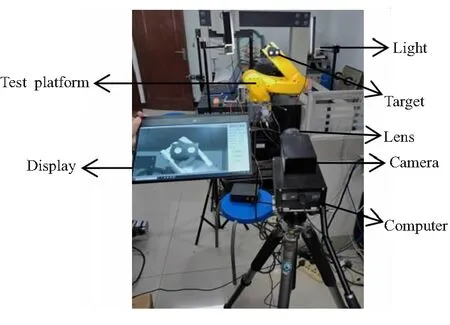
图6 喷管运动视觉测量系统示意图
相机采用GS3-U3-23S6M(黑白),分辨率为1920×1200像素,像素尺寸为0.005 86 mm,最高帧率达到162 Hz。镜头采用尼康生产的50 mm定焦镜头。控制摆杆及喷管摆动的实验平台包含X、Y两方向上的伺服液压作动器,通过这两个作动器来带动摆杆进行转动。考虑到高速相机在进行拍摄时对光源的照明亮度要求高,因此采用了对称式光源为整个视觉测量系统提供稳定的照明。
实验前,将相机固定在三脚架上,受到现场测试环境影响,相机对靶标的成像距离在3 m左右。实地试验完成了在2个不同压强、3个不同输入波形下的喷管摆动空间位姿测量。
3.2 单向摆动试验
在某一确定压强下,X方向或Y方向上的伺服液压作动器,以频率为0.2 Hz的三角波作为输入波形,摆动5个周期,摆动设定摆角为6°。通过本系统完成对靶标物的捕获,由于相机的帧频较高且目标图像处理速度很快(约100 Hz),通过实时对高速相机采集的图像进行数字图像处理,得到了靶标的实时运动轨迹数据,其输出波形如图7所示。
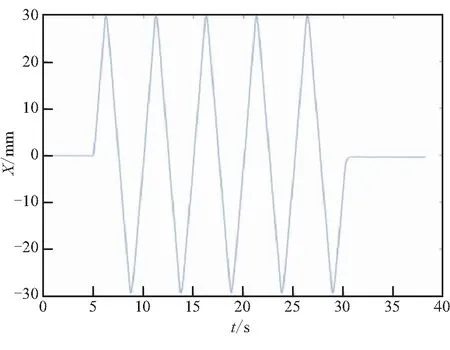
图7 三角波输出波形
针对摆心漂移的测量可以采用两点法、弦长法和拟合法。三种方法求解摆心的核心均是确定任一时刻的瞬时摆轴,由瞬时摆轴相交过摆心这一特性确定摆心。使用这三种方法对摆心漂移进行求解,得到的摆心位置分布结果如图8所示。
中外运-敦豪国际航空快件有限公司近日在其北京总部举行媒体发布会,宣布其珠海口岸正式落成并投入使用,成为落户珠海口岸国际快递监管中心的首家国际快递公司。此外,DHL正式宣布将持续加大在中国的战略投资,对外公开了今年以来的一系列投资举措。DHL称,借助港珠澳大桥带来的高效物流通道,DHL珠海口岸的建立将大幅提升珠江西岸地区国际物流的快递效率。随着2018年10月24日港珠澳大桥正式通车,由珠海口岸清关的国际快递转运至其香港转运中心(DHL全球三大转运中心之一)的时间将从原来的4小时缩短为45分钟,大大提升了转运时效。而这对于专业做国际限时快递服务的DHL来说,尤为重要。
喷管在试验过程当中的左右摆动角度是监测柔性喷管质量、火箭推力偏心性、伺服机构工作性能和推力向量控制系统性能等的重要测试和参考指标。在确定各瞬时摆轴位置后,摆角可以由瞬时摆轴摆动到左右最大角度的夹角来求解。

(a) Two point method (b)Chord length method (c)Fitting method
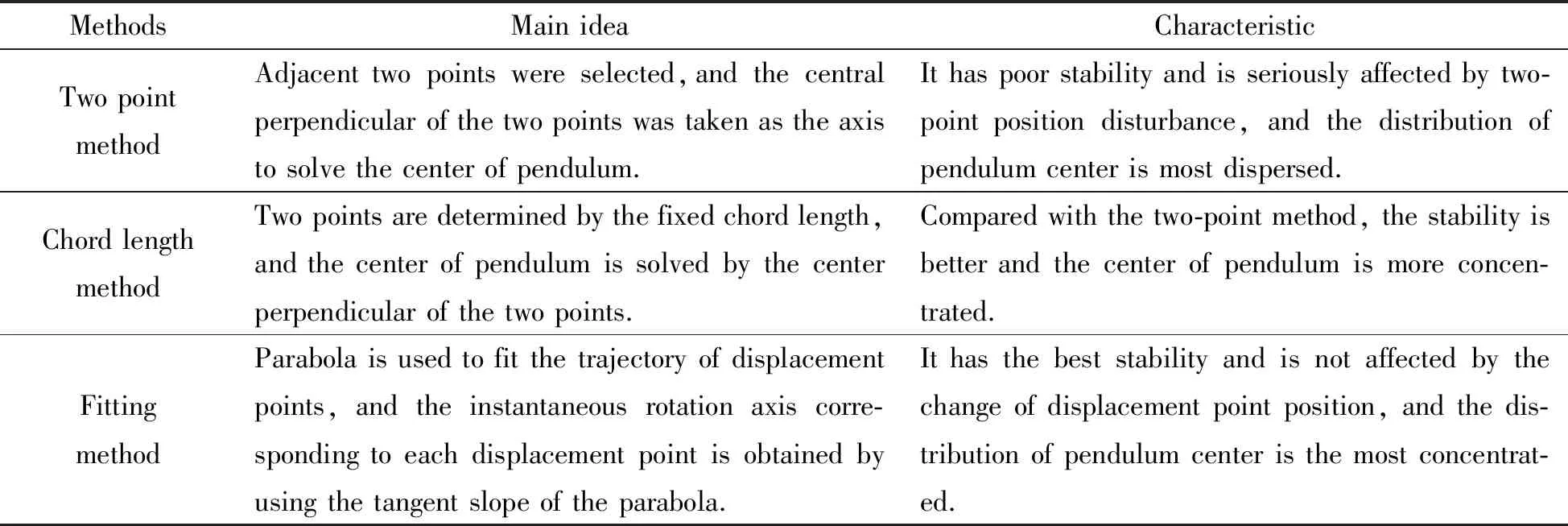
表1 两点法、弦长法和拟合法对比
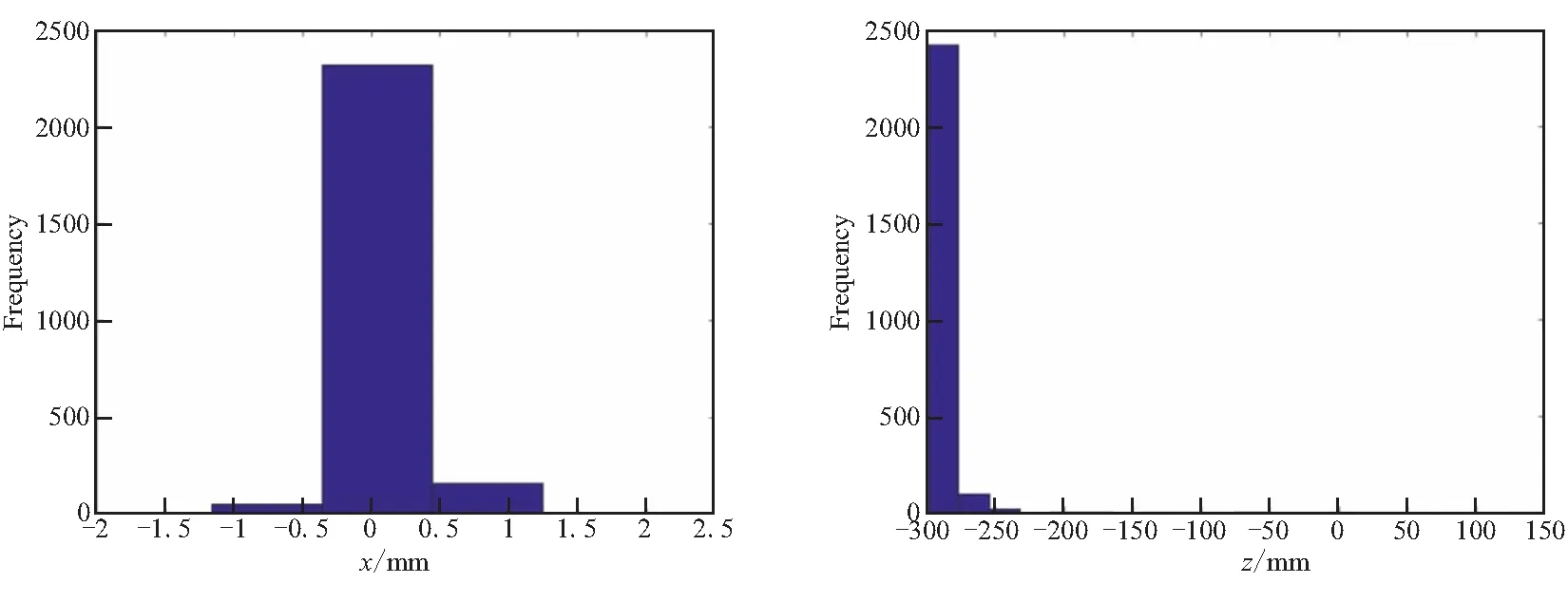
(a)x direction (b)z direction
根据得到的瞬时摆轴位置,由瞬时摆轴左右摆动到最大角度的位置来确定摆角。表2给出了在两种不同压强下,分别输入频率为0.2 Hz的方波、三角波以及正弦波,摆动5个周期,摆动设定摆角为6°,利用本文测量方案实时测量得到的摆角。本测试方案在不同压强和不同输入波形对固体发动机摆动喷管的摆角测量中,具有一定的测试精度和稳定性。当设定摆动角度为6°时,由于受到系统误差以及偶然误差等因素影响,测试得到的结果虽有波动,重复实验结果表明,整体测量结果趋于一致,说明本方案具有良好的测试稳定性。
首先,行政等级高的城市,基本公共服务总体水平明显高于其他城市。在总体基本公共服务水平前5名中,上海、南京、杭州在列,处于领先地位。在其他几类公共服务排名中,也同样如此。这些城市行政等级高,城市规模大。这是因为基本公共服务的水平不仅取决于地方政府的财政收入,还取决于当地居民对服务的消费需求。后者正是受到城市规模即市场大小的直接影响。然而除了沪宁杭三市外,长三角其他各市人口水平相似,却在基本公共服务的供给水平上参差不齐。这说明,基本公共服务水平受到城市行政等级、经济发展水平影响更大,受城市规模影响较小。
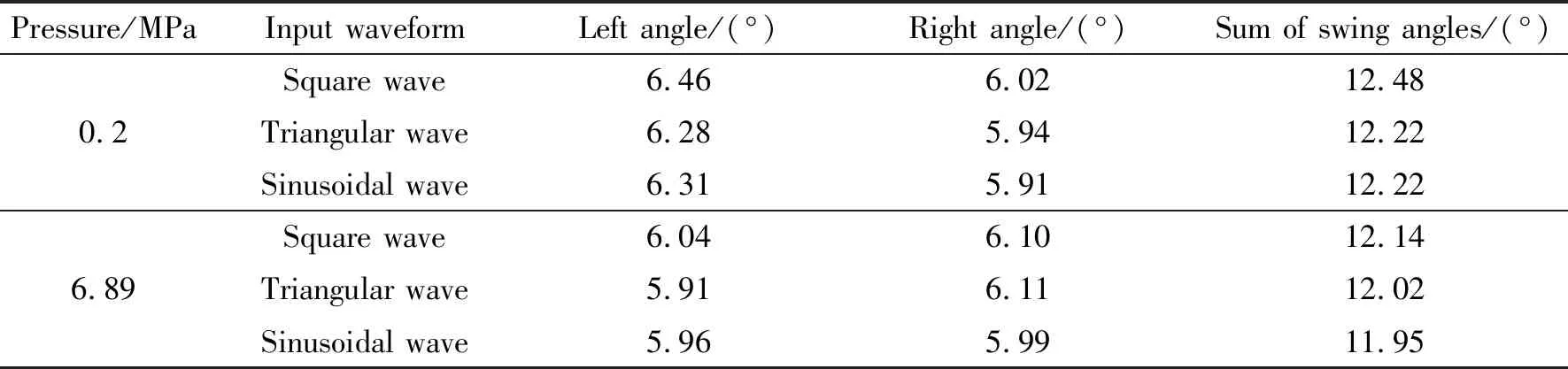
表2 方波、三角波和正弦波在0.2 MPa及6.89 MPa下摆角
3.3 圆周摆动试验
本方案还测试了在圆周摆动情形下的喷管摆动空间位姿情形。圆周摆动试验是指同时在x、y两个方向上,伺服液压作动器以0.2 Hz的频率摆动5个周期,摆角为6°,输出波形均为正弦波。依据单目视觉测量系统,利用实时得到的靶标三维运动轨迹得到驱动摆杆的圆周摆动波形,如图10所示。同时得到了驱动摆杆在x、y方向上的正弦波输入波形,如图11所示。

图10 驱动杆圆周摆动波形

图11 x、y方向输入波形
依据李萨如图形相关理论知识,这两个输入波形相位差为π/2,且沿着互相垂直方向的正弦振动的合成的轨迹图形应为椭圆,采用单目视觉实时测量系统得到的实际摆动轨迹与理论输出波形一致。针对火箭喷管的空间摆动轨迹情形,采用本方案能够得到实时运动轨迹,本文仅就圆周摆动情形下的轨迹测量给出说明,圆周摆动情形下的相关参数(如摆心、摆角等)测量不再给出。
4 结论
本文通过单目视觉实时测量方案,对固体发动机摆动喷管在不同压强和不同波形下的摆动情形进行了摆心和摆角的测量。实验结果表明,该实时测量技术测量准确度高,耗时低,稳定性好,实验操作简便,能够满足摆动喷管空间位姿的测量要求。本测量方案具有以下三个特点:
集中集热分户储热太阳能热水系统现场总线控制应用分析……………………………………… 刘玮,尹立增,郭卫星(3-46)
(1)在单目视觉测量系统中,利用人为设置的靶标实现了单目视觉测量系统快速实时获取靶标的三维运动轨迹。且靶标能够根据不同的现场工业环境进行定制化设计,以适应实时性测量要求。
(2)处理三维运动轨迹时,结合实际运动模型,提出了拟合法来对轨迹进行处理。和“两点法”等方法相比,“拟合法”有效降低了数据量,提升了数据处理效率,同时求解的摆心分布更加集中,90%的点落在的区间为:x∈[-0.6,0.7],z∈[-289.8,-276.2](单位:mm)。在不同压强以及不同输入波形的实验中,当输入摆角设定为6°时,摆角的求解结果趋于一致,测量稳定性良好。
(3)该系统不仅可以对单靶标进行跟踪测量,对多靶标也可以进行跟踪测量,借助多靶标可以完成火箭喷管圆周摆动的运动轨迹测量,相比多目视觉测量系统,系统操作简便。