基于AVMD和BSA-KELM的水电站厂房结构振动预测研究
2021-01-29王海军陆建宏任保瑞
王海军,许 松,陆建宏,任保瑞
(1.天津大学 水利工程仿真与安全国家重点实验室,天津 300350;2.天津大学 建筑工程学院,天津 300350;3.雅砻江流域水电开发有限公司二滩水力发电厂,四川 攀枝花 617000)
1 研究背景
河床式水电站的厂房结构既是机组的支撑结构,又是水流过流通道[1]。这种结构特点导致机组和厂房形成的动力学体系具有随机性、复杂性、非线性相关性等特点[2-5]。水电站厂房结构动力学特性的复杂性使得结构振动监测十分重要。然而,目前已建的各大型水电站厂房振动监测测点多布置于机组,厂房结构上测点布置较少。原型振动观测可以准确地反映机组和厂房结构的振动状态,但是原型振动观测多为短期观测,对水电站厂房进行长期观测成本较大。故利用机组上已有测点振动信号对厂房结构振动进行预测,为水电站厂房结构安全监测提供了一种思路[6]。目前的研究主要是通过找出机组与厂房结构的耦联关系,对水电站厂房结构振动标准差、均方根、加速度等幅值进行预测。例如,苗宗伟等[7]建立了径向基神经网络预测模型,对振动加速度进行了预测;练继建等[8]基于机组和厂房结构振动实测分析,利用最小二乘支持向量机对三峡水电站厂房振动标准差进行了预测;王海军等[9]建立了基于相关向量机的水电站厂房预测模型,对厂房结构振动标准差进行了预测;徐国宾等[10-11]基于广义回归神经网络,对结构振动均方根进行了预测;刘丹彤等[12]改进蝙蝠算法优化径向基神经网络模型,提升了模型预测精度。然而,振动标准差、均方根、加速度等幅值只能表征结构振动的程度,无法提供振动分析所需要的振动时程过程。近年来,有学者利用核极限学习机算法建立预测模型,对时程过程变化进行预测,得到了较好的效果。例如,王晓玲等[13]建立了高精度多核极限学习机大坝变形预测模型,对大坝变形过程进行了预测;张建伟等[14]建立了极限学习机预测模型,对水闸振动趋势进行了预测。
基于此,本文在原型观测的基础上,提出了一种基于AVMD(adaptive variational mode decomposition,自适应模态分解)和BSA(bird swarm algorithm,鸟群算法)-KELM(kernel extreme learning machine,核极限学习机)的水电站厂房结构振动时程预测模型。采用该方法,根据某河床式水电站原型观测数据建立模型,预测结果表明该模型与KELM预测模型相比,精度有显著提高;与AVMD-KELM预测模型相比,因AVMD-BSA-KELM模型参数经过了优化,预测精度也有所提高。
2 振动时程预测模型
振动时程预测模型主要由振动信号分解、分解信号单独预测、预测信号重构等组成。数据前处理中使用自适应变分模态分解方法,该方法是一种非递归、自适应的信号分解方法,在模态分解方面有较好的效果;预测模型中的核极限学习机方法是一类单隐层前向型网络,具有学习速度快、泛化能力好的特点。同时为了克服模型参数选取的主观性,引入鸟群算法对模型参数进行优化选取。
2.1 自适应变分模态分解
变分模态分解通过Hilbert变换构造解析信号并计算其单边谱,再由傅里叶变换位移特性将频谱移动至基带处,应用高斯平滑估算频谱宽度,优化的目标是IMF(intrinsic mode function,本征模态函数)的频谱宽度之和达到最小,形式如下:
(1)
s.t.∑uK=f(t)
(2)
式中:{uK}为模态集合;{wK}为对应的中心频率集合;r(t)为狄拉克函数;K为模态数目;约束条件为各模态之和等于原信号f(t)[15]。
为了克服VMD需要预设模态数量这一缺点,Lian等[16]提出了一种基于模态分量及噪声的特征而自动确定分解层数的自适应变分模态分解方法。该方法利用排列熵、频域极值、峭度准则及能量损失系数等指标对模态分解结果进行判断,然后调整模态数量K直至找到合适的K值。具体步骤如下:
(1)给定惩罚参数α、步长更新系数τ、最大分解层数Kmax以及最小分解层数Kmin。
(2)进行VMD运算,计算重构信号与输入信号能量损失系数e,若高于阈值,令K=K+1重新运行VMD,否则进入下一步判断。
(3)计算模态分量的排列熵pe,若pe高于阈值,则判定为含噪模态分量MFN(mode function with noise)或噪声;低于阈值,则判定为不含噪模态分量EMF(efficient mode function)。
(4)对于EMF分量,统计其频域极值点的数量和大小。若频域极值点数大于1且次极大值与最大值Pmax的比r大于阈值,则EMF发生模态混叠,令K=K+1重新运行VMD;否则进入下一步判断。
(5)对于MFN或噪声分量,计算其频域极值点领域半径范围内的峭度ku,若峭度ku大于阈值的极值点,则判定为含噪模态分量MFN,令K=K+1重新运行VMD;否则判定为噪声分量。
(6)按各分量主频升序排列,计算主频间距Df,统计Df小于阈值的模态数量n2,并令K=K-n2。
(7)根据确定的模态数量K,得到对应的VMD分解结果。
2.2 核极限学习机
ELM是Huang等[17]根据广义逆矩阵理论在2006年提出的一类单隐层前向型网络,具有学习速度快、泛化能力好的特点,已经被广泛应用在分类和回归拟合问题上。为了进一步提高ELM模型的稳定性和泛化能力,Huang[18]以核映射代替ELM中的随机映射,建立了KELM模型。
定义核矩阵ΩELM=HHT,矩阵的元素ΩELM(i,j)=h(xi)h(xj)=K(xi,xj),则:
Y=h(x)β=h(x)HT(I/C+HHT)-1y
(3)
式中:Y为ELM网络的输出;x为输入向量;H=h(x)为隐含层输出矩阵;β为隐含层与输出层的连接权重;I为对角矩阵;C为惩罚系数;y为期望输出向量;K(xi,xj)为核函数,文中选用收敛域宽、泛化能力好的径向基核如下:
K(xi,xj)=exp(-γ‖xi,xj‖2)
(4)
式中:γ>0,为核系数。
2.3 鸟群算法
由上文可知,建立KELM预测模型需要确定参数惩罚系数C和核系数γ,可采用鸟群算法BSA对模型参数联合优化,从而避免参数的主观选择。BSA是通过分析鸟群的3种行为:觅食行为、警戒行为和飞行行为,而提出来的一种群体智能优化算法[19]。BSA优化精度高,收敛速度快,鲁棒性好。
2.4 振动预测模型
基于AVMD和BSA-KELM的水电站厂房结构振动时程预测模型计算流程如图1所示。具体步骤如下:
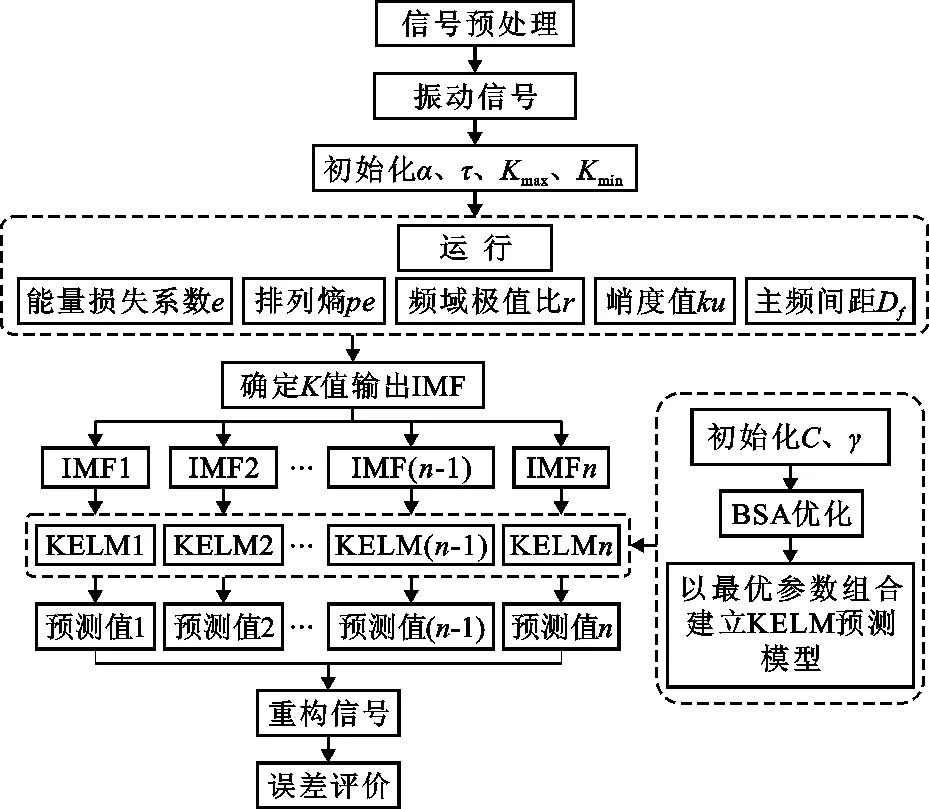
图1 基于AVMD和BSA-KELM的水电站厂房结构振动时程预测模型计算流程
(1)确定输入信号和预测信号;
(2)对振动信号进行预处理,确定信号有效性;
(3)使用AVMD对水电站输入信号和预测信号进行分解,得到n个IMF信号;
(4)对经过AVMD分解的IMF分量信号分别建立KELM预测模型,采用BSA对预测模型的待定参数进行联合优化;
(5)使用最优组合参数建立KELM预测模型;
(6)将预测得到的IMF分量信号进行重构,得到预测信号;
(7)误差评价。
3 水电站厂房结构振动预测
基于某河床式水电站原型观测数据,采用上述方法对水电站厂房结构振动响应趋势进行预测分析。该水电站最大坝高69.5 m,装机总容量600 MW,共安装4台单机容量为150 MW发电机组。选取该水电站4#机组坝段进行分析,传感器采用DP型低频位移振动传感器和水压脉动传感器。位移振动传感器型号为DPS-0.2-8-H(V),频响范围为0.2~200 Hz,灵敏度为8 mV/μm,水压脉动传感器量程为0~400×9.81 kPa,供电电压为24 V,输出电压为0~10 V,精度为全量程的0.5%,动态范围为0~1000 Hz。传感器现场布置如图2所示。
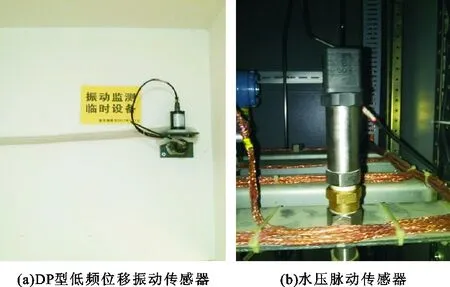
图2 传感器现场布置示意图
分别在下机架垂向、横河向、顺河向(测点1、2、3),顶盖垂向、横河向、顺河向(测点4、5、6),下机架基础垂向、横河向、顺河向(测点7、8、9),定子径向(测点10),发电机层楼板(测点11)等11个测点处安装低频位移振动传感器;分别在蜗壳(测点12)、尾水管进口(测点13)、肘管肘位(测点14)、尾水锥管(测点15)等4个测点处安装压力脉动传感器,具体位置见图3。
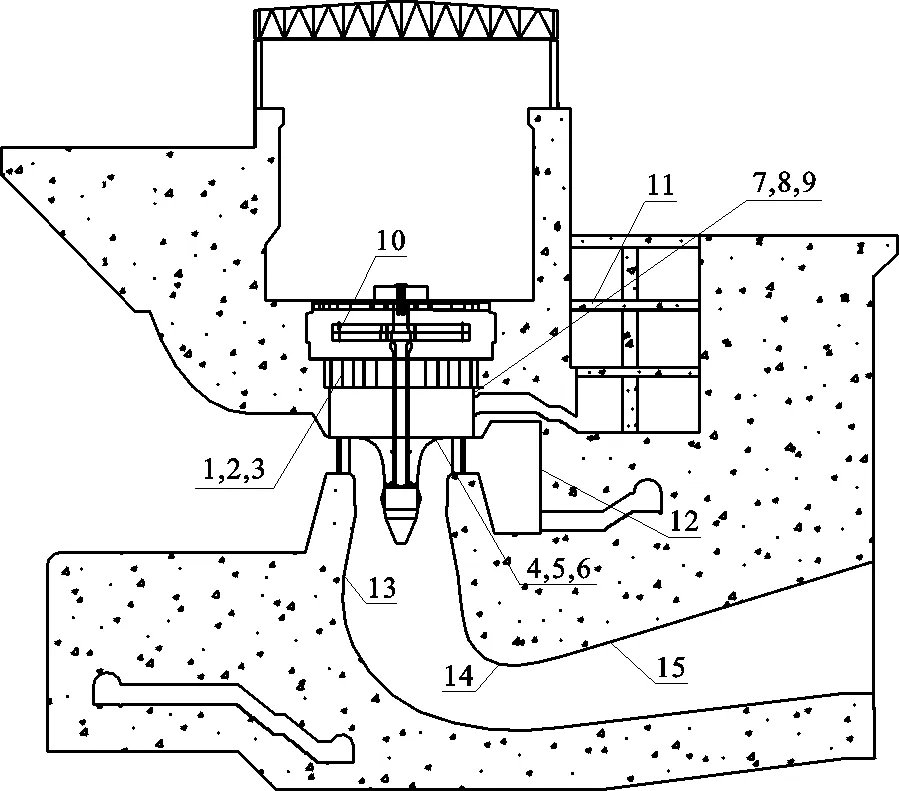
图3 某水电站厂房结构振动测点布置示意图
引起水电站机组和厂房振动的振源主要分为3类,分别是水力、机械、电磁。该水电站机组的额定转速为66.7 r/min,根据文献[20]的理论、经验公式得到激振频率如表1所示。
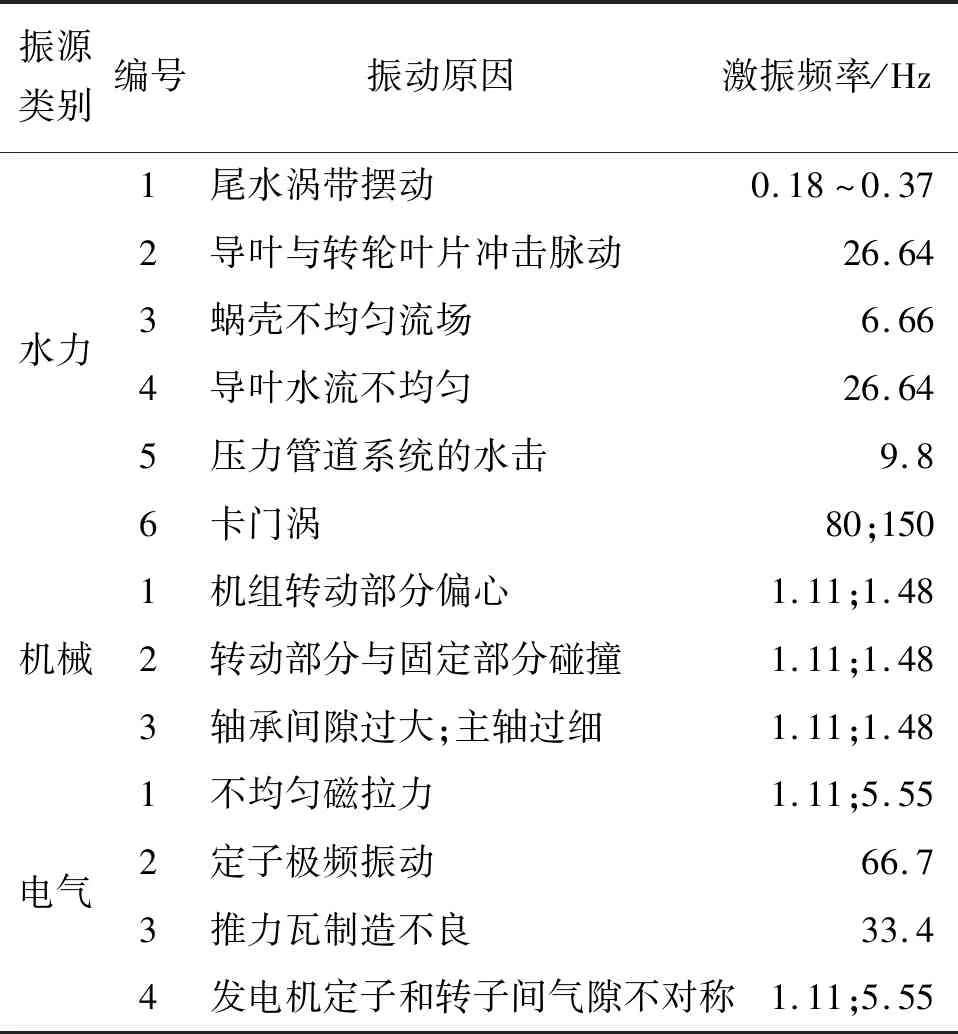
表1 水电站机组振动原因及激振频率
表2为不同负荷下水电站厂房结构不同部位振动主频。由表2可以看出,下机架基础垂向振动信号的主要频率成分为尾水涡带频率和机组转频的5倍频;下机架基础横河向振动信号的主要频率成分为尾水涡带频率;发电机层楼板垂向振动信号的主要频率成分为机组转频和尾水涡带频率。
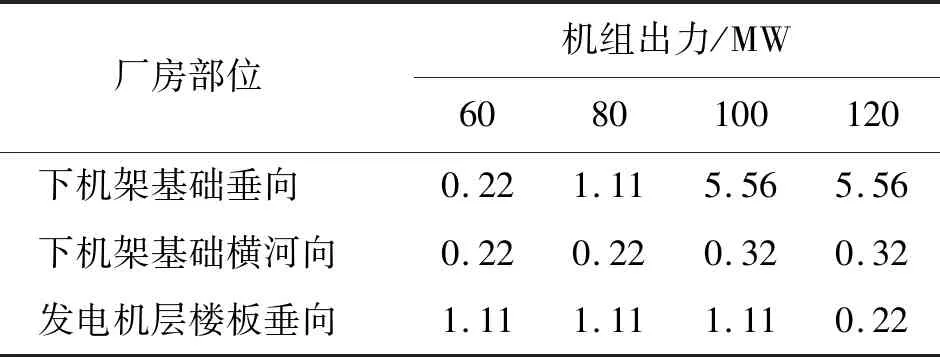
表2 不同负荷下水电站厂房结构不同部位振动主频 Hz
综上所述,该水电站厂房结构振动主要激励源是机组振动和尾水压力脉动。预测模型将机组振动和尾水压力脉动信号作为输入因子,包括定子径向、下机架垂向、下机架横河向、下机架顺河向、顶盖垂向、顶盖横河向和顶盖顺河向等7个机组部位位移振动信号,以及蜗壳、尾水管进口、肘管肘位和尾水锥管等4个脉动压力信号,共11个输入信号。预测输出分别包括下机架基础垂向、横河向,发电机层楼板垂向等厂房结构部位振动。选取机组出力为80 MW工况下一段平稳信号进行分析,截取时长为25 s,数据点个数为5 000。前4 000个数据点作为训练样本,后1 000个数据点作为预测样本。预测模型利用训练样本对模型进行训练,拟合出样本空间后对预测样本进行预测。以下机架基础垂向振动信号为例,监测数据如图4所示。
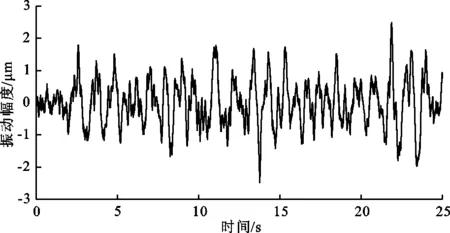
图4 下机架基础垂向振动监测数据(机组出力为80 MW工况)
4 预测结果与分析
4.1 AVMD分解
以下机架基础垂向振动信号为例,利用本文提出的AVMD分解方法对振动信号进行分解,其中Kmin=1、Kmax=10、α=500、τ=0,阈值参数取值如表3所示。

表3 AVMD分解各阈值参数取值表
通过自适应方法确定K=4,得到4个IMF分量时程图和功率谱图如图5所示。由图5中的分解结果可知,IMF1~IMF4振动频率逐步加快,主频分别为0.32、1.11、5.54、35.48 Hz;分别对应尾水涡带摆动频率、机组转频、机组转频的5倍频和不均匀流场振动频率。进一步验证了下机架基础垂向振动主要激励源是机组振动和尾水压力脉动。
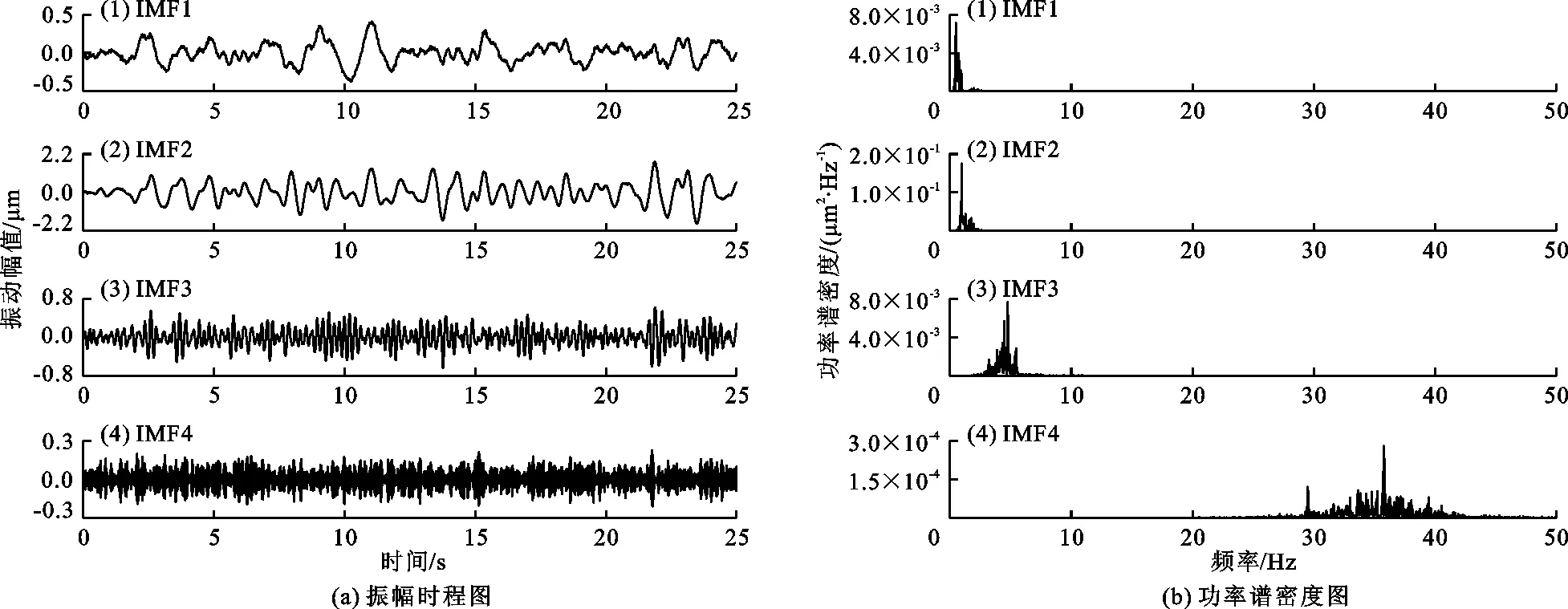
图5 下机架基础垂向振动信号AVMD分解后各阶分量振幅时程图和功率谱密度图
4.2 KELM预测和误差评价
对AVMD分解得到的各阶IMF分量分别建立KELM预测模型,并将预测得到的IMF分量相加重构,得到最终的预测信号。预测模型的参数利用BSA优化算法进行优化,其主要参数取值见表4。BSA优化算法是自编程序实现的。
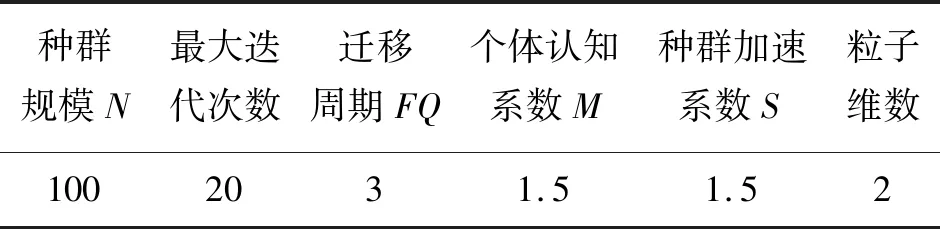
表4 BSA优化算法主要参数取值
为了验证该预测方法的有效性,另选取了两种预测模型进行对比分析,分别为直接利用KELM方法进行预测和利用AVMD进行预处理后结合KELM方法进行预测,两种模型的惩罚系数C均取为1,核系数γ均取为100。KELM、AVMD-KELM、AVMD-BSA-KELM 3种预测模型均使用学习能力较强的RBF核。
图6~8分别为下机架基础垂向和横河向以及发电机层楼板垂向测点的预测结果。由图6~8以看出,3种模型对振动的趋势均有一定的预测效果。通过对比可以发现,在振动信号突变处,与AVMD-KELM和AVMD-BSA-KELM两个模型相比,KELM模型预测效果相对较差。这一现象在下机架基础横河向测点预测结果最为明显(如图7所示)。下机架基础横河向测点振动信号含有比例较高的高频分量,频率成分复杂。可见,由于水电站厂房结构振动信号中含有的频率成分较复杂,直接对振动信号建立预测模型的预测精度较低。而利用AVMD分解方法,对振动信号进行预处理,分解成多个IMF分量,并针对各阶IMF分量分别建立预测模型能够较好地解决这一问题。
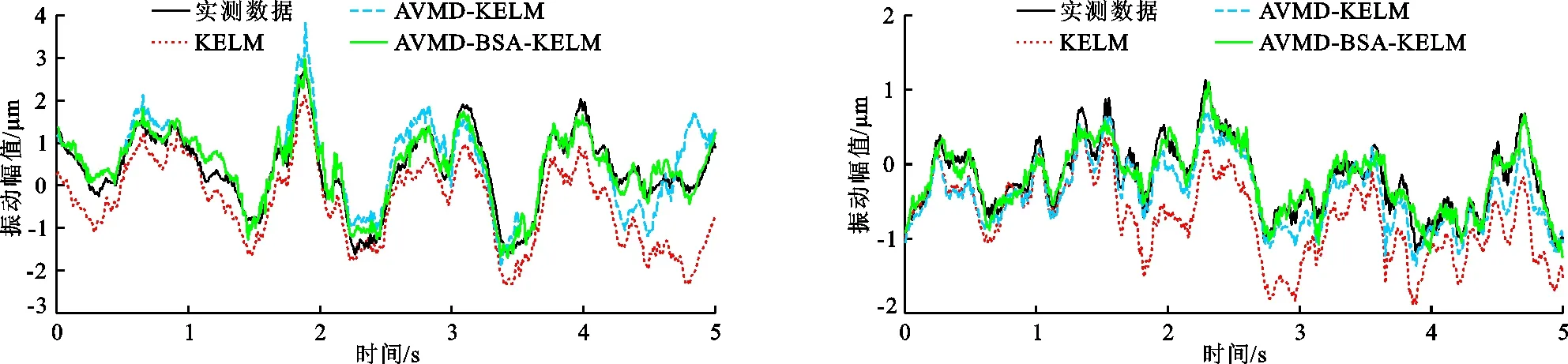
图6 下机架基础垂向振动信号预测结果与实测数据对比图 图7 下机架基础横河向振动信号预测结果与实测数据对比图
为了更加客观地对预测结果进行分析,引入决定系数R2、均方根误差RMSE以及平均绝对误差MAE3种指标值对预测结果进行定量分析,具体指标值见表5。R2的值越大,说明预测值与实测值的相关性越好;RMSE和MAE的值越小,说明预测效果越好。由表5可见,3种模型的预测值R2均大于0.45,AVMD-KELM和AVMD-BSA-KELM模型预测值的R2较KELM模型预测值的R2有较大提升,说明利用AVMD分解方法对振动信号进行预处理能够显著提高振动响应预测模型的预测性能。AVMD-BSA-KELM模型与AVMD-KELM模型相比,预测精度也有所提高,说明参数对预测精度影响较大,对参数进行优化有助于提高模型预测精度。
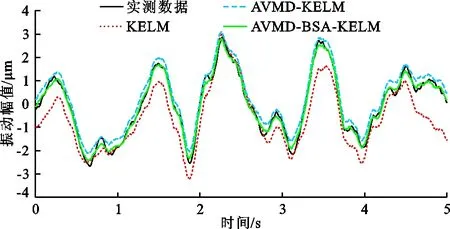
图8 发电机层楼板垂向振动信号预测结果与实测数据对比图
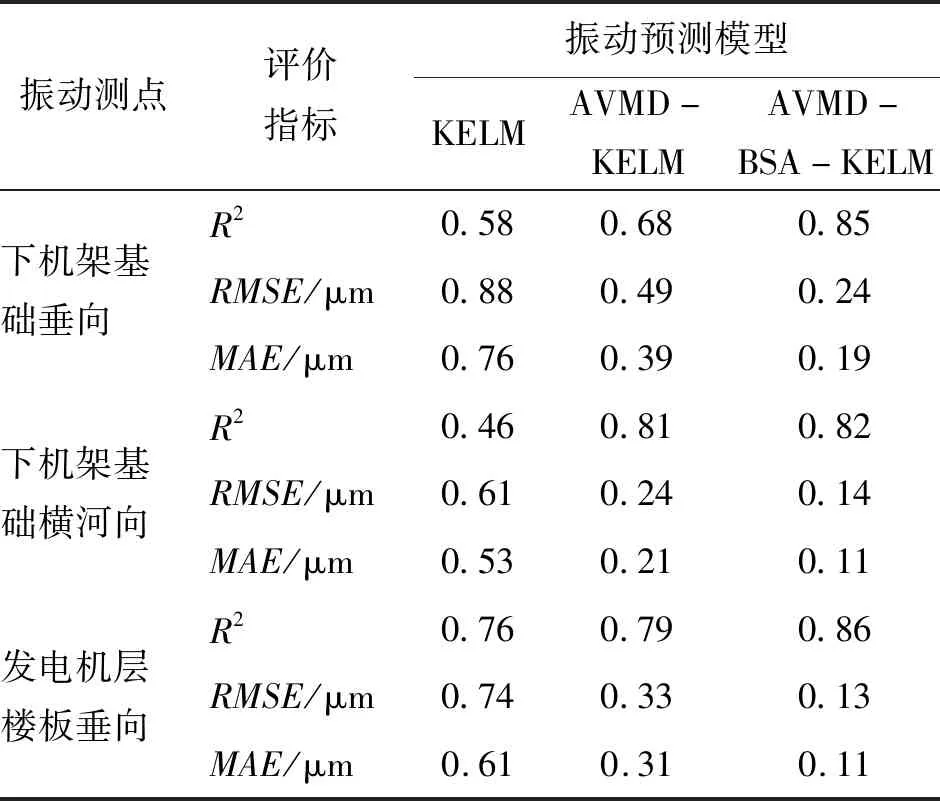
表5 3种振动预测模型的预测结果评价指标值
5 结 论
针对水电站厂房结构振动安全,提出一种基于AVMD-BSA-KELM的水电站厂房结构振动响应时程预测方法,并应用于实际工程,主要结论如下:
(1)水电站厂房振动信号频率成分复杂,直接对振动信号建立预测模型,则预测的精度较低;利用AVMD分解方法对振动信号进行预处理,再对各阶IMF分量分别建立预测模型,能够有效地提高模型预测精度。
(2)与AVMD-KELM模型对比发现,AVMD-BSA-KELM模型预测精度更高,说明模型参数对预测精度影响较大,对参数进行优化选取有利于提高模型预测精度。
