一种基于边缘计算的RTK定位方法
2021-01-28吴肖伶张记会龚星衡邵泽瑞张卫华
吴肖伶, 张记会, 龚星衡, 邵泽瑞, 张卫华
(四川大学计算机学院, 成都 610065)
1 引 言
一般意义上的GPS定位通常指伪距定位或者载波相位定位[1],这种方法需要GPS接收机在同一时间能够观测到4颗以上的卫星,根据测量GPS接收机与卫星间的距离及从卫星导航电文中获取的卫星瞬时坐标,通过距离交汇法解算出GPS接收机所在的空间坐标.其中,伪距定位是通过光速与卫星发送的测距码信号到达GPS接收机经过的时间相乘,测量卫星与GPS接收机的伪距;而载波相位定位则是通过载波信号从卫星到达GPS接收机时的相位差与载波波长的相乘来计算卫星与GPS接收机间的距离,相较伪距定位,载波相位定位具有更高的定位精度,理论上能够达到毫米级精度,但其测量与伪距定位一样易受电离层、多路径、天气等误差源的干扰,通常达不到其理论精度.
为了降低电离层、天气等环境因素对定位的影响,美国Trimble公司提出了一种实时动态载波相位差分(Real-Time kinematic, RTK)定位技术,实现了在移动中全球卫星导航系统(Global Navigation Satellite System,GNSS)数据的瞬时更新,同时拥有较高的定位精度.RTK是一种基于载波相位观测值的实时动态定位技术,与GPS定位不同的是,RTK定位采用了差分定位的技术,通过架设基准站并将基准站数据与流动站数据进行差分解算获取流动站的精确位置,当流动站处于基准站周围一定范围内时,流动站可视作与基准站处于相同定位环境下,由于基准站坐标已知,即可降低环境因素对定位带来的误差,达到比GPS定位更为精确的结果[2].
针对传统RTK定位方案成本颇高的问题,本文提出了一种边缘计算环境下的RTK实现方案E-RTK(Edge Real-Time Kinematic),通过将流动站的解算工作移至边缘设备,降低流动站对算力的要求,使得流动站能够使用更低性能的处理机进行实现,以降低定位的硬件成本.在此基础上,本文对上述E-RTK方案进行了样机实现,并在该样机上使用GPS+BEIDOU卫星数据与GPS+GLONASS卫星数据进行了两组定位对照实验.实验结果表明,本文提出的E-RTK定位方案能够达到厘米级精度,与传统RTK定位精度相当;除此之外,在当前的软硬件条件下,采用GPS+BEIDOU数据进行E-RTK定位具有更大优势.
2 研究现状
RTK本质上是对传统卫星定位技术的一种拓展与优化,它通过相位差分降低了环境因素对传统卫星定位的影响,将定位精度提升了一个层次,扩大了卫星定位技术的使用范围.该技术于20世纪90年代一经问世便迅速成为卫星定位相关领域的研究热点,其成果被广泛应用于测量、工程及自动化等各个行业. 文献[3]将RTK应用于实时工程测量,根据工程测量放样和定位,提出了GPS-RTK在实时工程测量中的应用方法,并对其进行了程序实现;文献[4]将RTK应用于移动机器人导航及其测量数据的地理信息处理,提出了一种新的移动机器人区域路径点导航方法,该方法较为简单,且具有不错的鲁棒性; 文献[5]将RTKLIB(一项开源RTK定位源代码)移植到树莓派开发板上,并通过NTRIP协议与基准站进行通信,提出了一种RTK定位的低成本实现,并将其用于无人机导航;2018年,文献[6]针对城市等狭窄区域的RTK定位通常存在的多路径及卫星信号断续问题,将RTK定位与INS惯性导航结合,提出了一种紧耦合的RTK/INS算法,该算法能够在城市等区域提供更加准确可靠的定位结果;2019年,丁曦等人通过冰面地形内插及测线交叉点比对两种方式对2013~2015年三期RTK数据进行分析,将RTK-GPS应用与北极冰川高度研究,取得了不错成果[7].
近年来,随着中国北斗导航卫星(BEIDOU Navigation Satellite System, BDS)的日渐成熟,各类基于BEIDOU+GPS卫星数据的RTK定位研究开始浮现.Teunissen等人的研究表明使在用GPS与北斗导航卫星结合进行RTK定位时,由于具有更多的卫星可用,使得其具有更大的截止仰角,能够显著提高GNSS在城市及低海拔多路径受限条件下的适用性[8];2016年,Odolinski等人将GPS与BEIDOU结合进行单频双系统RTK定位,并将其与双频单系统GPS-RTK进行了比较,其实验证明,使用BEIDOU结合GPS进行RTK定位将比双频单系统具有更大的截止仰角,同时由于使用了更便宜的单频Ublox接收机,该系统能够以更低的成本进行实现[9];2018年,Nobuaki Kubo等建立了一种混合GPS+BEIDOU的RTK定位模式,并通过芯片级原子钟辅助估计接收机的时钟误差,以达到更高的定位精度,其实验表明混合定位模式比普通RTK-GNSS系统的定位Fix率高10%左右[10].
在RTK相关技术的日趋成熟的同时,其制造成本却成了RTK定位技术发展的一大阻碍.这一方面是因为定位天线等配件的成本限制;另一方面则是因为在传统RTK定位中,计算任务分散在基准站与流动站中,导致两者都需要较高的算力,从而间接增大了成本.本文对某电商平台的RTK设备价格区间进行了统计,具体结果如1所示.

图1 某电商平台不同价格区间RTK设备的占比
而另一方面,而随着5G网络等相关技术的发展,边缘计算逐渐成为近年的研究热点,且各界对于结合RTK与边缘计算的研究还处于起始阶段.基于以上情况,本文为解决RTK定位的成本问题,提出了一种基于边缘计算的RTK定位,将计算任务集中在基准站,降低了流动站的硬件需求,从而达到降低成本的目的.
3 边缘RTK定位
传统RTK定位是于流动站接收GNSS数据,并结合从基准站传输而来的基准站GNSS数据,在流动站进行解算得到流动站的精确坐标信息,其整体结构如图2所示.

图2 传统RTK的系统结构
传统RTK定位系统一般由RTK流动站和RTK基准站组成.其中,RTK基准站通常由一个GNSS天线、一个GNSS接收机以及一个处理机组成,其通常位于一个坐标已知点,并通过GNSS天线及GNSS接收机接收来自卫星的GNSS数据,经处理机处理后将其分发给流动站;流动站的硬件构成与基准站相似,不同之处在于,流动站除了通过GNSS天线及GNSS接收机接收来自卫星的GNNS数据外,其处理机同时会接收来自基准站的参考GNSS数据.通过对这两组GNSS数据进行差分解算,流动站即可得到其本身所处位置的精准坐标数据.图3展示了传统RTK的大致定位流程.

图3 传统RTK定位流程
本文提出了一种基于边缘计算的实时动态载波相位差分定位方法E-RTK(Edge Real-Time Kinematic).其总体结构与传统RTK相似,但在基准站处将处理机替换成了算力更强的边缘设备.图4展示了E-RTK的具体结构.

图4 E-RTK的系统结构
与传统RTK定位的流动站解算不同,E-RTK的解算任务在边缘设备进行.通过在边缘设备上安装GNSS天线及GNSS接收机,使其在充当计算节点的同时,也具备RTK基准站的功能.而流动站只需要进行简单的数据转发的工作,降低了其对硬件性能的需求.从系统整体结构上来看,数据的流向由从基准站到流动站变为了从流动站到基准站,但数据传输的过程并没有变复杂,仍然是单向单次传输.因此,边缘计算并不会给E-RTK带来更多的数据传输延迟,也不会因此造成解算性能的下降.其大致的定位流程如图5所示.
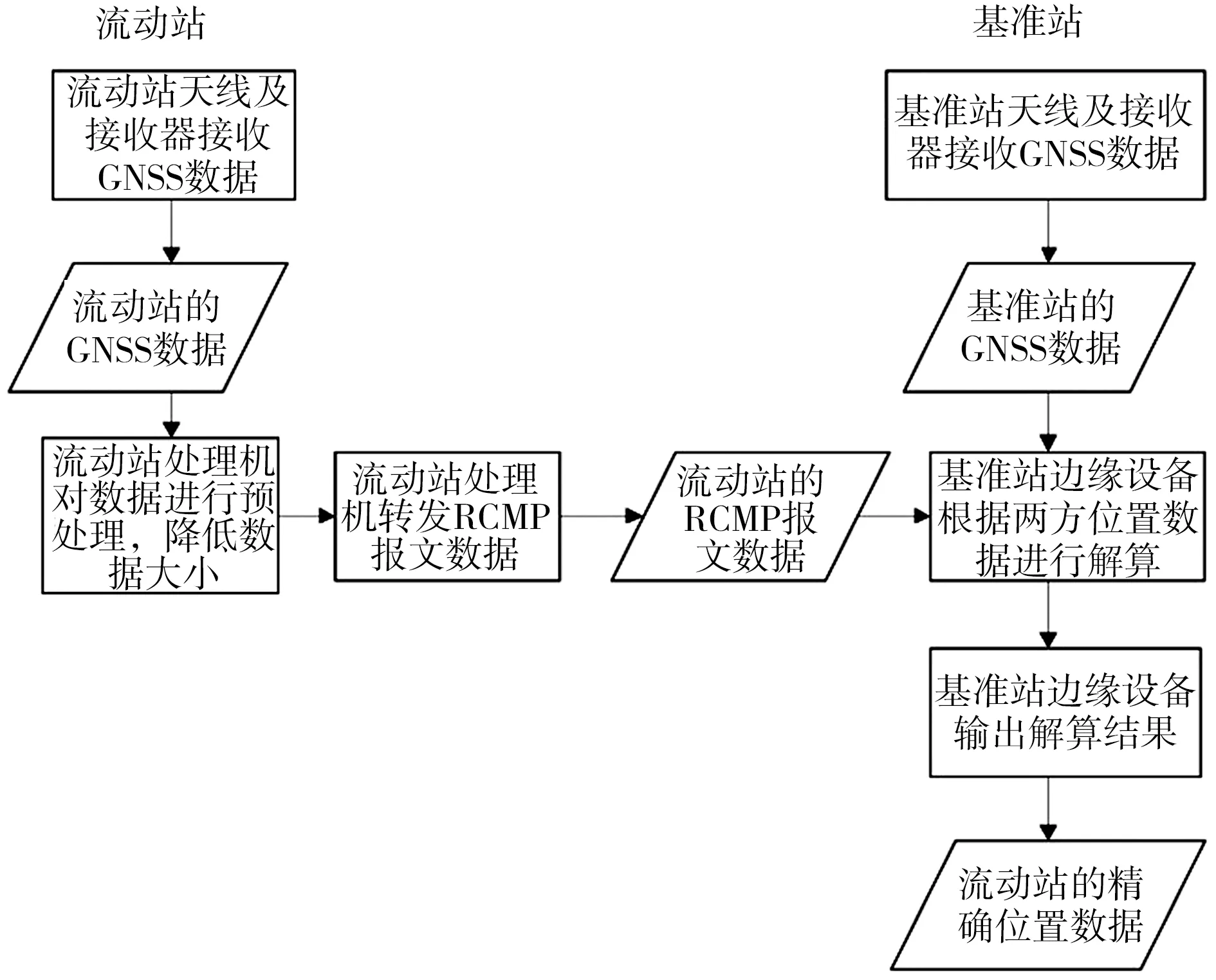
图5 E-RTK的定位流程
E-RTK实现了计算任务的集中化,使流动站能够使用更加低性能、廉价的处理机进行制造.而边缘设备对算力的需求将会增加,但由于其能够同时为多个流动站提供解算服务,综合成本将会比传统RTK更低.同时,边缘设备的电源环境优于流动站电源环境,能够使系统硬件性能得到充分发挥,且能够较大程度的提高流动站的续航能力.除此之外,E-RTK可降低流动站损坏、遗失造成的损失,在一定程度上减小了RTK定位网络的扩展成本,有利于RTK定位在工农业等领域的普及.
4 实验与分析
为了验证上述E-RTK的可行性及实际性能,同时探究该E-RTK的最佳运行参数及配置,本文对上述E-RTK进行了样机实现,并采用GPS+GLONASS与GPS+BEIDOU两种卫星系统组合来对样机进行了定位实验.
4.1 实验样机
样机实现的重点在于相关硬件的选择以及编写程序实现RTK计算任务的边缘化.
组成E-RTK设备的硬件必须具备在保证其定位性能的情况下使成本尽可能降低的特点.因此,本文在基准站方面使用ASUSRT-ACRH17开源路由器作边缘设备,该路由器在硬件配置上拥有四核ARMCortex A7处理器、128 MB Flash及256 MBRAM.除此之外,该基准站还配备一只u-blox neo m8tGNSS接收器及一颗三系统单频天线,该天线的接收频率范围为:GPSL1 1575.42 MHz、GLONASSL1 1602 MHz、BEIDOU B1 1561 MHz、GALILEOE1 1575.42 MHz.流动站使用的GNSS接收器及天线与基准站相同,其处理机则是一块Wemos D1 mini pro开发板,该开发板集成了32位Tensilica L106处理器,CPU时钟频率为80 MHz/160 MHz,且具备16 MB Flash.上述各个硬件设备的购买单价如表1所示.
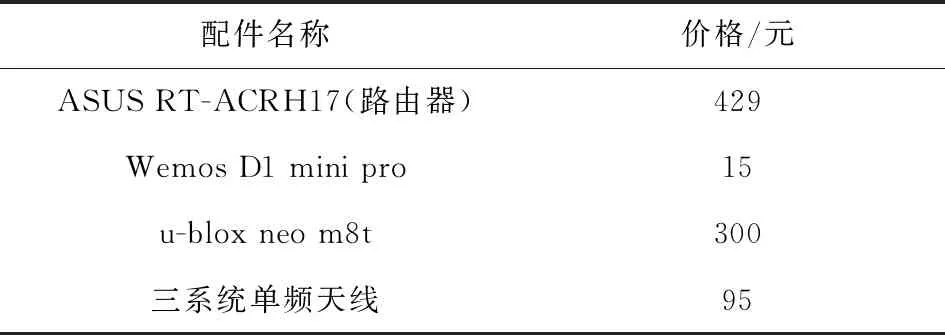
表1 样机各配件价格
在软件方面,E-RTK的基站边缘设备运行Openwrt开源路由器系统,同时使用编译自开源项目RTKLIB的RTKRCV程序充当基础解算工具[11].同时,对于流动站,本文使用C/C++对开发板进行编程定制,实现基准站连接及保持、定位模块初始化及GNSS数据转发等功能.

图6 常见RTK设备价格对比
本文对上述E-RTK及常见的部分传统RTK的基准站和流动站价格进行如图6所示的对比.可以发现,E-RTK成本远低于常见的传统RTK.除此之外,对于传统RTK设备,流动站与基准站价格相同,E-RTK的流动站单价明显低于基准站,而对于RTK应用来说,流动站的数量是明显多于基准站的,因此E-RTK更有利于RTK定位网络的扩展.
4.2 实验结果
本文采用静态测试的方式来对上述E-RTK定位样机进行实验.在每个实验中均使用两组卫星数据组合进行对比测试,一组采用GPS+GLONASS,另一组采用GPS+BEIDOU,采样率均为5 Hz.
4.2.1 精度测试 本文首先对上述E-RTK的定位精度进行测试,测试方法为在基准站与流动站均静止不动的情况下,待定位收敛为Fix状态后,观察每组测试中定位位置的偏移范围,具体实验结果如图7所示.
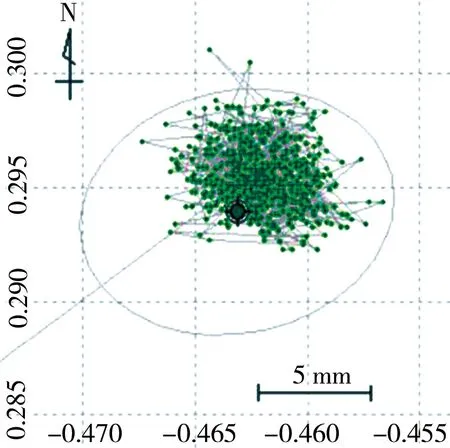
(a) GPS+GLONASS
由图7可以看出,两组实验的定位精度均在1 cm以内.其中GPS+GLONASS组的定位位置偏移范围大约为0.9 cm,GPS+BEIDOU组定位位置偏移范围在0.7 cm左右.图8展示了定位在East-West、North-South及Up-Down三个方向的偏移范围.
由图8观察可以发现,该E-RTK定位系统在水平方向上的定位精度明显高于其在垂直方向上的定位精度,除此之外,相较于GPS+GLONASS组的实验结果,GPS+BEIDOU组在3个方向的定位上均具备更好的精度.
4.2.2 Fix速度测试 RTK定位结果一般具备两种状态,即Float状态与Fix状态,Float状态下的结果位置波动较大,可靠性相对较低,而Fix状态下的定位结果为稳定结果,位置波动较小,可靠性更高.因此,能否更快的到达Fix状态是衡量RTK定位系统性能的重要因素,该因素通常被称作Fix速度.
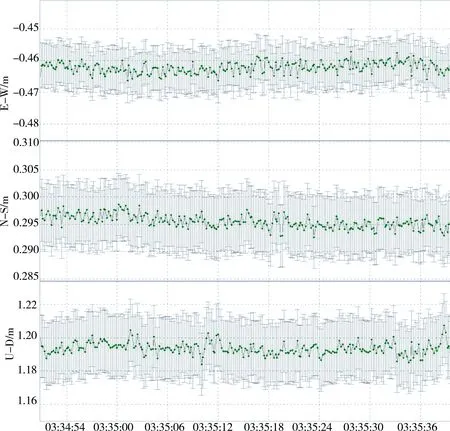
(a) GPS+GLONASS
Fig.8 The offset range of the positioning position in three directions
本文针对上述E-RTK样机使用两组卫星数据组合的Fix速度进行了测试.实验方法为在基准站解算结果为Fix状态后,保持基准站解算程序运行,关闭流动站,等待30 s后重新启动流动站,记录基准站从重新收到流动站GNSS数据到基准站解算结果达到Fix状态所需要的时间.实验结果如图9所示.

图9 Fix速度实验结果
在10次实验中,GPS+GLONASS组可用卫星数量为10颗,而GPS+BEIDOU组则有15颗卫星可用.在此条件下,GPS+GLONASS组的Fix时长平均为20.92 s,而GPS+BEIDOU组的平均Fix时长为14.72 s,较GPS+GLONASS组缩短了29.64%左右.
4.3 实验分析
针对上述实验结果, 本文进行了如下分析:在当前软硬件及参数条件下,E-RTK使用GPS+GLONASS卫星数据定位与使用GPS+BEIDOU卫星数据定位的精度相当.而在Fix速度上,GPS+BEIDOU组具有一定的优势,其中一部分原因是因为GPS与GLONASS频谱相同,而BEIDOU使用了不同的通信频段,在组合GPS与BEIDOU进行定位时,由于信号频谱不同,多路径效应的影响受到了削弱,同时对信号干扰带来的影响也有一定的抵制作用.同时,BEIDOU的多频特性有利于削弱电离层和对流层误差,弱化基准站距离限制,固定载波相位模糊度,使得首次定位时间缩短[12],本实验虽然只使用了单频段的BEIDOU信号,但GPS与BEIDOU两者共同组成了多频率定位,使得GPS+BEIDOU的E-RTK定位拥有更短的Fix时间.除此之外,GPS+BEIDOU方案卫星数量更多,观测数据的冗余度更高,有利于减弱局部环境的影响,这也是其中一部分原因.
5 结 论
传统RTK定位在流动站进行数据解算,对流动站的处理机有较大的算力需求,不利于定位网络的低成本扩展.本文将边缘计算技术与RTK定位相结合,提出了一种基于边缘计算的实时动态载波相位差分定位方法E-RTK,通过将流动站解算工作移至边缘设备,减小了流动站的算力需求,在保证定位性能不变的情况下,降低了定位设备的综合硬件成本及定位网络的扩展难度.除此之外,本文基于E-RTK进行了定位样机实现,并使用GPS+BEIDOU卫星组合以及最常见的GPS+GLONASS卫星组合进行了相关的定位性能测试.通过实验发现,采用GPS+BEIDOU卫星系统的E-RTK能够在定位精度基本不变的情况下具有更快的Fix速度,在可用性及可靠性上具备更大的优势,如过隧道后定位恢复更快等.同时,采用GPS+BEIDOU卫星系统有利于促进我国北斗卫星导航系统的普及化及产业化.
