基于RFID的可标记无源感知
2021-01-14孙遒宋艳辉
孙遒 宋艳辉


摘 要:随着物联网与人工智能在理论、方法和技术上的进一步融合和演进,人类对物理世界的感知已经进入泛在智能阶段。针对反向散射通信被动传感的感知机制和方法并不明确,通过混合感知的方式,可以观察到标签阵列中多标签感知信号的时空相关性,从而实现对感知结果的进一步理解。根据实验观察结果,得出了未来验证的假设。
关键词:无源感知设备;RFID;传感算法
中图分类号:TN929.5 文献标识码:A 文章编号:2096-4706(2021)12-0165-03
Abstract: With the further integration and evolution of the theory, method and technology of the internet of things and artificial intelligence, human perception of the physical world has entered the stage of ubiquitous intelligence. The sensing mechanism and method of passive sensing for backscatter communication are not clear. Through mixed sensing, the temporal and spatial correlation of multi tag sensing signals in tag array can be observed, so as to realize the further understanding of the sensing results. According to the experimental observation results, the hypothesis for future verification is obtained.
Keywords: passive sensing equipment; RFID; sensing algorithm
0 引 言
无源感知作为一项新兴技术,以其特有的感知机理和方法,逐渐成为泛在感知计算领域的核心支撑技术。然而,当前大多数无源感知技术是基于未标记的反射信号进行感知的,无法区分多个反射信号的具体来源,因此,无法对同时存在的多个感知对象进行有效区分,导致应用范围受到限制。射频识别(Radio Frequency Identification, RFID)技術的出现为实现“可标记”的无源感知提供了新的机遇。RFID系统基于反向散射机制来实现RFID阅读器与标签之间的通信。在反向散射过程中,阅读器天线发射的连续波信号被RFID标签调制并反射,从而使阅读器可有效地识别标签信号。一方面,RFID标签反向散射的信号非常微弱,极易受到各种环境因素的干扰(包括传输环境中的多径效应、干扰对象的能量吸收等)。因此,表征传输环境因素的信息会自然而然地包含在RFID标签的反向散射信号中。基于这一特性,RFID技术的功能逐渐实现了由“识别”到“感知”的蜕变。另一方面,RFID的可标识特性能够有效地区分反向散射信号的来源,从而保证了无源感知机制的“可标记性”。如图1所示,利用反向散射通信机制的环境敏感特性,RFID系统可以基于标签反射信号中携带的环境因素的动态特征对指定对象进行感知,例如肢体行为识别、呼吸及心跳监测等。
1 RFID无源感知的发展历程
RFID无源感知的发展历程包括以下三个阶段:
(1)从“单标签感知”到“标签阵列感知”——拓展感知维度。基于“标签阵列”的感知机制能够在空间范畴对感知维度进行充分的拓展,通过合理设计多个标签的拓扑关系,可以将信号特征以“差分”的方法来消除外界环境因素对标签信号的整体性干扰,对抗动态环境变化带来的影响,提高感知信号的稳定性和可靠性。
(2)从“绝对定位”到“相对定位”——提升感知敏感度。“相对定位”对于单标签个体而言,能够更精确地判定在空间上标签之间的相对位置关系;而对于标签阵列而言,通过对比和分析标签之间的相对位置以及既有的拓扑结构,能够更加敏感地捕捉到标签阵列的变化,从而提高对感知对象的感知灵敏度。
(3)从“单一的RFID感知”到“基于RFID的多模态感知”——扩大感知范畴。RFID感知系统主要依赖反向散射信号的变化特征来对物理环境中的对象进行感知,这种相对单一的感知方式难以综合、全面地刻画不同感知域的状态变化。因此,将RFID和其他模态的感知进行融合以实现多模态感知,能够从不同的感知范畴更全面地感知目标对象。
根据RFID标签的一些固有特性,在RFID无源感知过程中,可以以绑定式的方式将标签直接部署在感知对象上进行感知,或者以非绑定式的方式将标签部署在感知对象的周围进行感知。因此,基于RFID的无源感知技术按感知方式的不同可以分为绑定式感知、非绑定式感知和混合式感知。
2 基于RFID的绑定式和非绑定式感知
根据感知原理的不同,绑定式感知又可以进一步细分为基于标签信号物理模型、基于标签能量耦合变化和基于信号变化模式匹配的三种感知方法。
对于基于标签信号物理模型的绑定式感知方法,我们可以根据信号的传播特点构建基于信号特征的物理模型来实现感知,如基于相位的三维几何模型、基于信号强度的信号传播模型等。特定物理模型能够为标签的反射信号特征和感知对象的相关状态这两者之间提供一种映射关系。虽然基于RFID的绑定式感知通常能够实现精确的感知,但是在部分应用场景下,感知对象无法时时刻刻携带或者绑定RFID标签,这种情况下可以考虑采用非绑定式的方法来完成感知任务。基于RFID的非绑定式感知是指以非接触的方式将RFID标签部署在感知对象周围,当反向散射通信环境中的感知对象状态发生变化时,通过探索和提取RFID标签反射信号的特征,来推导环境中未绑定标签的感知对象的状态。根据感知原理的不同,非绑定式感知又可以细分为以下三种感知方法:
(1)基于标签电感耦合的非绑定式感知方法。研究人员发现,当两个标签距离较近(如1~2 cm)时会存在电感耦合现象,外界环境中感知对象的状态(如位置、速度等)变化会进一步扰动标签之间的电感耦合,标签的信号强度、读取率等信号特征会随之发生变化,若合理运用这一特性,便能实现精确目标感知。
(2)基于反射信号模型的非绑定式感知方法。研究人员发现,在反向散射过程中,环境中的人体、墙壁等物体会反射射频信号形成多径效应,导致标签信号混杂环境变化特征,因此可以通过建立反射模型来关联信号变化与感知对象的状态变化。
(3)基于信号模式匹配的非绑定式感知方法。当感知对象的状态变化和RFID信号特征之间的关系过于复杂,难以建立精准的物理模型来进行描述时,可以基于深度学习方法构建数据驱动的模型,根据不同动作的信号变化规律,采用模式匹配的方式,关联感知状态(如用户动作)与标签阵列的信号特征(如相位变化趋势、移动速度、动作时间等),从而基于标签阵列的时空关联性来识别用户的动作和行为。
3 基于RFID的混合式感知
绑定式感知与非绑定式感知并非相互对立,二者各有优劣,如果能够根据特定的应用需求将二者结合起来使用,势必能够起到优势互补、相辅相成的效果。基于RFID的混合式感知融合了绑定与非绑定式感知的双重特点,既能对感知对象关联的标签信号(如与绑定对象位置相关联的信号特征)进行直接感知,又能利用感知对象对标签反射信号的影响(如与非绑定反射对象相关联的信号特征)感知状态变化。通过混合式感知的方式,进一步深入挖掘标签阵列中多标签感知信号的时空关联性,可实现感知结果的“去粗存精”和“去伪存真”。
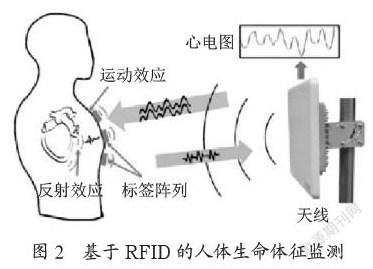
对于基于RFID的人体生命体征监测系统,当前的心率感知或者采用专业的医用心电图设备,部署麻烦且价格昂贵;或者采用可穿戴设备或无线设备进行感知,缺点是只能测量粗粒度心率信息,难以检测期前收缩、心律不齐等隐患。考虑到人体的呼吸和心跳均会对RFID信号产生影响,为此研究团队研发了一款基于RFID的人体生命体征监测系统RF-ECG。RF-ECG系统利用部署在胸口的一组RFID标签阵列进行呼吸和心率的感知。其中,呼吸的胸廓变化会改变标签的位置,称为“运动效应”;心跳的舒张收缩会影响信号的反射,称为“反射效应”。为消除运动效应带来的显著干扰,RF-ECG系统在“信号分离”思路的引导下对心率进行细粒度感知。如图2所示,RF-ECG系统在胸口处部署一组标签阵列,并利用正前方的天线持续扫描标签进行心电图感知。RF-ECG首先利用多个标签之间的空间关联性,进行胸廓位置变化的绑定式感知,并从原始信号中分离去除“运动效应”;然后,利用非绑定式反射信号模型,抽取心跳带来的“反射效应”,并利用多标签的时间关联性融合多标签的反射信号,进行心率信号的提取;最后,采用动态规划的方式,对心率的融合信号进行分割,实现细粒度的心率感知。
4 典型案例
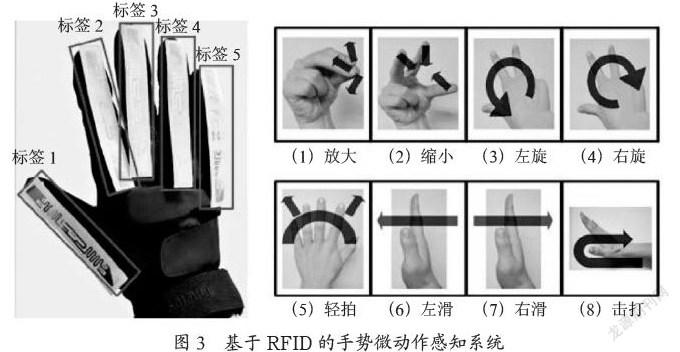
基于RFID的手势微动作感知系统:当前的人机交互方式已从键盘、触摸板输入等方式转变为隔空手势交互的新型模式。用户可以使用肢体甚至手指进行体感交互,操纵显示屏或者空中的虚拟对象,更加自然地支持虚拟现实和增强现实相关应用。同样,区别于现有的基于计算机视觉的解决方案,研究团队提出了一款基于RFID的多指微动作感知系统RF-Glove,实现对1~2 cm精度“微动作手势”的精确感知。如图3所示,RF-Glove将无源标签分别附着在手套的五个手指上,使用RFID天线对多个标签进行持续扫描采集反向散射信号特征。考虑到多个手指在执行“微动作”的过程中,信号特征变化与手势的关系相对比较复杂,RF-Glove基于信号变化模式匹配的方式进行感知,当用户戴着手套执行“微动作”手势时,RFID阅读器能获得一系列相位/信号强度值曲线。对于每种类型的多指“微动作”,RF-Glove通过主成分分析学习动作的信号变化,获取一组n×5大小的特征曲线轮廓。给定一个多指“微动作”的输入,RF-Glove将该动作所对应的相位轮廓集与每种类型的多指“微动作”模板进行比较,匹配出最相似的“微动作”指令。
基于RFID的肢体行为追踪系统:当前基于计算机视觉技术的动作捕捉系统(如微软Kinect)已经能够有效地支持基于人体肢体行为的人机交互与动作行为识别,但仍存在受光线遮挡影响、视觉处理计算复杂度高等缺陷。考虑到基于RFID的绑定式感知能够以可穿戴的方式穿戴到人体上,研发了一款基于RFID的肢体行为追踪系统RF-Kinect,该系统利用肢体上部署的RFID标签阵列的信号相位对肢体动作进行感知。为消除人体对信号的多径反射带来的干扰,RF-Kinect系统根据“相对定位”的思路对标签的相位信号进行特征抽取,实现对三维肢体角度的估算及校准。如图4所示,RF-Kinect以人体的肢体关节作为节点对肢体进行划分,在每一段肢体上分别绑定两个RFID标签,使用兩个正对人体的天线对这些标签进行扫描。首先,RF-Kinect利用同一肢体上多个标签之间的相位差对肢体发生的旋转角度进行初步估算,之后再进一步利用同一标签在不同天线上的相位差,使用到达角(Angle of Arrival, AOA)模型估算其到达角,对之前估算的三维肢体角进行细化,符合约束条件的肢体姿势将被保留。RF-Kinect进一步使用基于相对距离关系的肢体角度过滤方法计算骨骼之间的相对距离,去除异常角度,并且将搜索空间大大减少。最后,将独立的姿势联合起来,以此身体姿势序列来识别肢体的运动行为。总体来说,RF-Kinect基于柔性可穿戴标签构建了一套基于非刚体拓扑结构的物理模型,并基于“相对定位”的思路来推理拓扑结构的位置变化,由此实现对肢体动作行为的追踪。
5 结 论
随着物联网与人工智能在理论、方法和技术上的进一步融合和演进,人类对物理世界的感知已进入“泛在智能”阶段,“AI+IOT”无所不在的智能框架将进一步渗透到各种新的环境感知技术中。文章应用基于RFID的混合传感方法(以RFID为例的被动传感技术),实现了更精确、更广义的传感,完成了“特征成像”和“智能推理”两项任务,实践证明效果不错。后续研究会将“深度学习”与“模型驱动”相结合,实现一种准确、通用、健壮的泛在智能感知机制。
参考文献:
[1] WANG F,ZHOU S P,PANEV S,et al. Person-in-WiFi:Fine-Grained Person Perception Using WiFi [C]//2019 IEEE/CVF International Conference on Computer Vision (ICCV).Seoul:IEEE,2019:5451-5460.
[2] ZHENG Y,ZHANG Y,QIAN K,et al. Zero-effort cross-domain gesture recognition with Wi-Fi[C]//MobiSys'19:The 17th Annual International Conference on Mobile Systems,Applications,and Services,Seoul:Association for Computing Machinery,2019:313-325.
[3] VASISHT D,WANG J,Dina Katabi. RF-IDraw:virtual touch screen in the air using RF signals[C]//SIGCOMM'14:ACM SIGCOMM 2014 Conference,Chicago:Association for Computing Machinery,2014,44(4):235-246.
[4] BU Y ,LEI X,JIA L,et al. 3-Dimensional Reconstruction on Tagged Packages via RFID Systems[C]// 2017 14th Annual IEEE International Conference on Sensing,Communication,and Networking (SECON). IEEE,2017.
[5] BU Y,LEI X,GONG Y,et al. RF-Dial:An RFID-based 2D Human-Computer Interaction via Tag Array [C]//IEEE INFOCOM 2018-IEEE Conference on Computer Communications,Honolulu :IEEE,2018:837-845.
[6] WANG C ,JIAN L,CHEN Y,et al. RF-kinect:A wearable RFID-based approach towards 3D body movement tracking [C]//Proceedings of the ACM on Interactive,Mobile,Wearable and Ubiquitous Technologies,New York:Association for Computing Machinery,2018,2(1):1-28.
作者簡介:孙遒(1971—),女,汉族,黑龙江鸡西人,副研究员,本科,研究方向:复杂网络,智能感知计算;宋艳辉(1981—),女,汉族,黑龙江哈尔滨人,助理研究员,本科,研究方向:智能感知计算。
