基于Coretex-A53和Qt的智能车载系统设计
2021-01-12陈岳煜师文庆
陈岳煜,师文庆
(广东海洋大学电子与信息工程学院,广东湛江 524088)
0 引言
智能车载系统是近年来发展起来的一种新型车载系统,过去车载系统从原先仅能单纯提供CD播放及车辆状态,一直发展到近年随着3G/4G/5G 等互联网技术、半导体传感器技术、电子信息技术和嵌入式行业的不断发展和融合,特别是近年来人工智能技术的快速发展和5G技术的出现,人们对智能车载系统的要求也越来越高,希望其拥有更多更加方便实用的功能[1-3]。
现阶段,汽车对人们来说早已不是单一的交通工具,汽车的数字化、智能化、多功能化是未来汽车电子产品的必然趋势[4]。如今,某些高端车的智能车载系统上已经整合了以前人们需要独立购买配置的电子产品功能,包括汽车导航、多媒体功能、行车雷达、互联网通信等许多功能,特别是近些年来,在AI 人工智能的发展下,各大生产厂商还在智能车载系统上加上了AI 机器人语音助手、自动驾驶等功能。随着5G时代的到来,物联网技术越来越多被人们应用到汽车领域,智能汽车车载系统已经是一个重要的研究方向[5-6]。
基于Coretex-A53和Qt的智能车载系统,硬件平台由基于ARM公司的Cortex-A53架构的S5P6818芯片为核心的Linux开发板,软件上由Linux系统上的Qt集成开发环境进行开发,主要为用户提供了音乐播放、行车记录仪、倒车雷达、系统设置等功能[7]。
1 硬件实现
1.1 Arm Cortex-A53
ARM 处理器是由英国Acorn 有限公司设计的低功耗成本的第一款RISC微处理器,其广泛地使用在许多嵌入式系统设计,具有低功耗、高性能、性比价比高等优点。ARM Cortex-A53 进一步扩大ARM 在高性能与低功耗领域的领先地位,Cortex-A53 是实现ARM Holdings 设计的ARMv8-A 64 位指令集的前两个微体系结构之一。Cortex-A53 是一个超标量处理器,能够双重发出一些指令[8]。
Cortex-A53 是全球最小的64 位ARM 的应用处理器之一,具有双向超标量,是一个有序执行流水线的8 级流水线处理器。该处理器的每个核心都必须使用DSP 和NEON SIMD 扩展,硬件虚拟化支持,板载VFPv4 浮点单元,64 字节缓存行,TrustZone 安全扩展,10 项L1 TLB 和L2 TLB,4 KiB 条件分支预测器,256项间接分支预测器。
硬件平台所选用的是基于Arm Cortex-A53架构的S5P6818的核心板,此核心板PCB采用了10层的沉金工艺设计,具有良好的电气特性和抗干扰特性,工作稳定可靠,集成了千兆以太网,可以应用于多个领域。该平台拥有超高性能,最高主频高达1.4 GHz,可应用于嵌入式Linux和Android等操作系统的驱动、应用开发[9]。
该处理器能支持全格式视频解码,在LCD 控制器上,芯片板的显示控制接口有MIPI、RGB、LVDS三路,显示分辨率可达2048×1280,60 Hz。
1.2 LCD电容触摸屏
硬件平台上所使用的屏幕是7 寸电容触摸显示屏,大小为800 mm×480 mm,此触摸屏与Linux 系统兼容,可以通过Linux 的内核文件来使用此触摸屏的显示和触屏功能,提供GUI界面给用户,方便用户使用操作。
1.3 USB摄像头
所选用的摄像头为创新USB 摄像头,没有麦克风功能,支持常用的摄像头功能,同时支持V4L2 格式,Linux 系统可以通过V4L2库把摄像头获取到的每帧画面在LCD屏幕上实时地显示出来。
1.4 HC-SR04超声波模块
HC-SR04 超声波模块CS100A,性能稳定、测量距离精确,感应角度不大于15°,精度可达3 mm,探测距离为2~450 cm。图1所示为超声波模块HC-SR04的实物图。
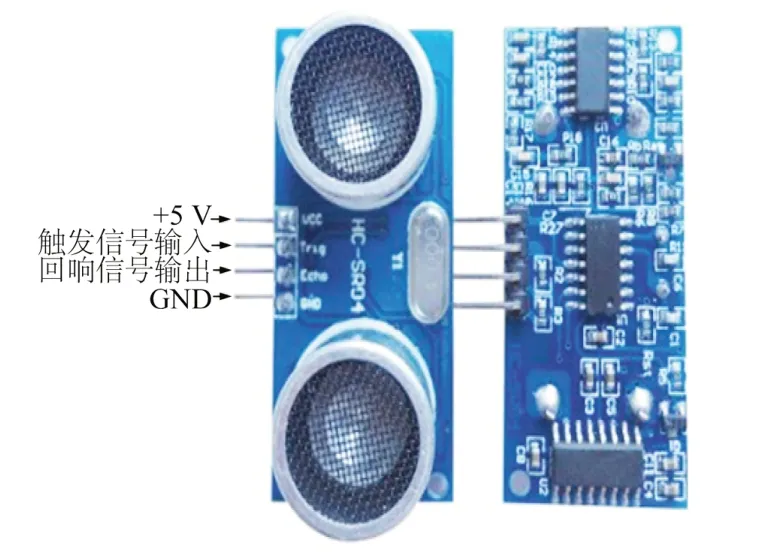
图1 超声波模块HC-SR04实物图
超声波模块的测量距离计算公式:
式中:L为测量距离;t为高电平时间。
图2所示为超声波模块HC-SR04的应用电路图。HC-SR04的一个控制口发出一个持续时间超过10 μs的高电平,待接收口有高电平输出时,开定时器计时,该端口输出为低电平时,读取定时器的值。然后通过上式的超声波测距的计算公式计算出待测距离。如图3所示为HC-SR04测距的时序图。

图2 HC-SR04 电路原理图
2 软件实现
软件方面主要是对此车载系统的界面和功能进行实现,首先是通过移植相应的库到Linux 开发板上,有mplayer 库、jpeg库、v4l2库和qt-arm库。
图4 是所示为软件的流程图,软件的设计可分为5 大模块:主界面、音乐播放器、行车记录仪、设置、倒车雷达。主界面可以显示系统当前的时间、通过http 协议获取当地天气、状态栏和可以使用的软件;音乐播放器模块通过调用mplayer库,让用户可以实现对歌曲的播放状态、音量、播放顺序等进行调整,还可以选择显示歌词,被选择的歌词就会随着歌曲的播放进度滚动地显示在屏幕上。行车记录仪模块通过调用USB 摄像头和v4l2 库,把摄像头捕捉到的每一帧画面实时显示到屏幕上,实现对汽车周围环境的实时监测;设置模块用户可调整系统的时间和语言,语言通过Qt国际化的语言家功能进行实现,用户可选择中文或者英文,时间可以调整系统当前的日期和时间[10];图5所示为倒车雷达的启动运行流程,倒车雷达使用了摄像头和超声波模块,摄像头实时显示汽车在倒车时后面的画面,同时超声波模块会获取汽车与后方障碍物的距离然后传送给系统,系统会把距离显示在屏幕上,当小于一定距离时,系统会播报语音提醒用户注意停车,超声波模块和模拟挂挡的按键模块都是通过Linux内核驱动的方式实现,把功能驱动成功后裁剪进开发板上的Linux系统,通过调用ioctl函数来访问相关驱动得到数据[11]。

图3 HC-SR04时序图

图4 软件主流程图
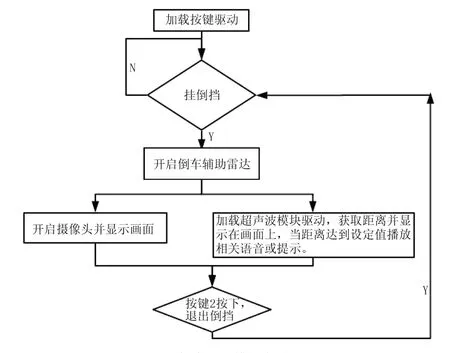
图5 倒车雷达模块启动流程
3 结果分析
3.1 结果
本设计是基于Coretex-A53和Qt的智能车载系统,实现了音乐播放、行车记录仪、倒车雷达、语言切换、天气状况、时间设置等多种功能。
系统启动后进入启动动画,显示软件Logo、加载动画、版本和版权等信息,如图6所示。当系统加载完毕后自动跳过此界面进入系统主界面,如图7所示,主界面显示当前日期、时间、城市、天气状况、系统软件和状态栏,用户可通过触摸屏幕选择要使用的软件。

图6 系统启动画面

图7 系统主界面
图8 所示为音乐播放器软件界面,用户可以播放系统上的音乐,通过虚拟按键可以调整歌曲进度、声音、播放顺序、播放列表、歌词等功能。图9 所示为行车记录仪软件界面,在屏幕上实时显示当前摄像头捕捉到的画面。

图8 音乐播放器界面

图9 行车记录仪界面
图10所示为倒车雷达软件界面,在屏幕上实时显示当前摄像头的画面和超声波模块探测的距离。

图10 倒车雷达界面
图11~12分别为语言设置和时间设置界面,语言可选择中文或英文,时间可根据自己需要的进行调整。

图11 语言设置界面

图12 时间设置界面
3.2 分析
基于ARM Cortex-A53架构的开发板作为硬件平台,实现了低功耗、高性能、性比价比高等目的;用Qt进行开发,利用Qt强大的移植能力,对多平台都支持,从而使本设计具有较好的移植性,方便不同平台的用户使用;选择Linux 系统,基于Linux系统本身强大的功能和开源性,使得本设计在制作过程中节省了很多精力和时间,同时也让本设计有了许多强大的功能。
本设计的智能车载系统上搭载了音乐播放、行车记录仪、倒车雷达、语言切换、天气状况、时间设置等软件,为用户提供了多种方便实用的功能,实现了集安全、娱乐、操作方便、高性价比等多种优点的智能车载系统。
4 结束语
本系统旨在设计一种功能完善的智能车载系统,为车主们提供更加方便快捷的服务,同时也是对目前市面上智能车载系统的功能进行整合完善。该系统是基于Cortex-A53 和Qt的智能车载系统,具有音乐播放、行车记录仪、倒车雷达、天气预报、时间设置等多种功能。另外,基于Qt国际化模块功能让此系统具有国际化,支持多种语言转换,实现了集安全、休闲、娱乐、网络、强实用性和高可靠性等多种优点与一体的现代化多功能智能车载系统。
