激光雷达在智能汽车上的应用
2021-01-08宛东
摘 要:随着汽车制造业和智能技术的迅猛发展,智能汽车将主导汽车市场,文章主要分析激光雷达在智能汽车上的作用。
关键词:障碍物预测;跟踪和识别;建图;匹配定位
0 引言
节能环保、新能源汽车、智能汽车成为我国汽车发展方向,智能汽车主要是发展自主式智能汽车和网联式智能汽车。自主式智能汽车和网联式智能汽车要实现上述功能只装配普通微波雷达是不能实现的,要实现上述功能,激光雷达是自主式智能汽车和网联式智能汽车电气系统控制系统中必不可少的元件。
1 激光雷达在智能汽车上的作用
1.1 扫描式激光雷达
目前能在智能汽车上使用的扫描式激光雷达有机械式旋转激光雷达、微机电系统扫描式雷达和相控阵激光雷达。
机械式旋转激光雷达(发射、接收、共轴旋转的激光雷达)是目前比较成熟的,已有无人驾驶概念汽车试用机械式旋转激光雷达装置。
基于微机电系统的扫描式雷达目前属于技术研究状态,它的原理是通过微机电系统扫描镜来改变光路。
相控阵激光雷达是通过逐点扫描的方式,即通过多个小天线之间发射的激光的发射相位来改变光路而实现的。
1.2 面阵式激光雷达
面阵式激光雷达发射的就是一个面阵的光,主要问题在于探测距离较近。
2 激光雷达在智能汽车上工作过程
2.1 飞行时间测量物体的距离
在飞行时间ToF LiDAR中,激光发出持续时间为τ的光脉冲,在发射的瞬间激活计时电路内部时钟。从目标反射的光脉冲到达光电探测器时,会产生一种使时钟失效的输出电信号。这种电子测量往返ToFΔt可计算出目标到反射点的距离R。
若现实中激光和光电探测器位于同一位置,其距离R是由以下两个因素影响:
c为光在真空中的速度,n为传播介质的折射率(空气中折射率接近1)。这两个因素影响着距离分辨率ΔR:若激光点的直径大于要解析的目标大小,则测量Δt和脉冲的空间宽度w(w=cτ)的不确定性为δΔt。
在典型汽车LiDAR系统中,激光产生的脉冲持续时间约为4 ns,因此最小光束发散角是必需的。
2.2 汽车激光雷达系统光的波长选择
对汽车激光雷达系统设计者来说,最关键的就是选择光的波长。目前最受欢迎的两种波长是905 nm和1 550 nm,对于汽车LiDAR来说,由于天气条件和反射表面类型可能性众多,这是一个复杂的问题。在现实的环境中,由于1 550 nm的吸水率比905 nm的更强,其实905 nm的光损失更少。
3 激光雷达应用在智能汽车上的功能
3.1 分割和识别功能
分割器采用了caffe框架的深度完全卷积神经网络(FCNN)对障碍物进行分割,有以下4步。
3.1.1 通道特征提取
计算以LiDar传感器某一范围内的各个单元格中与点有关的8个统计量,将其作为通道特征输入到卷积神经网络(FCNN)。
3.1.2 基于卷积神经网络的障碍物预测
(1)卷积神经网络的障碍物预测是智能汽车激光雷达感知的重要环节。完全卷积神经网络由3层构成:下游编码层(特征编码器)、上游解码层(特征解码器)、障碍物属性预测层(预测器)。
(2)特征编码器将通道特征图像作为输入,并且随着特征抽取的增加而连续下采样其空间分辨率。然后特征解码器逐渐对特征图像上采样到输入2D网格的空间分辨率,可以恢复特征图像的空间细节,以促进单元格方向的障碍物位置、速度属性预测。根据具有非线性激活(即ReLu)層的堆叠卷积/分散层来实现下采样和上采样操作[1]。
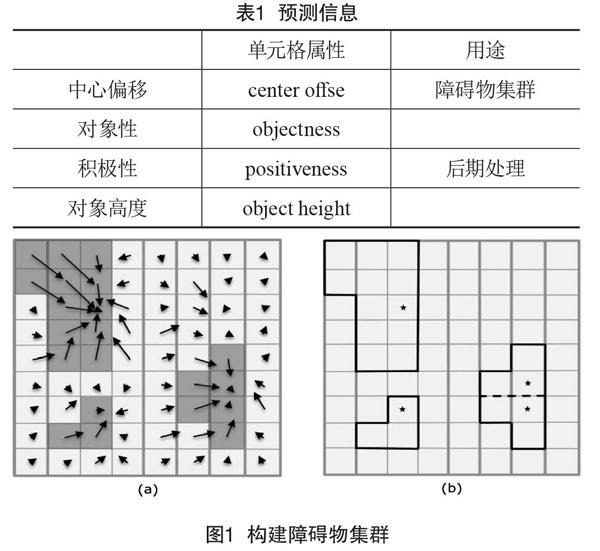
(3)基于FCNN的预测,输出每个单元格的4个预测信息,分别用于之后的障碍物聚类和后期处理(见表1)。
(4)障碍物集群(cluster2D)。基于单元格中心偏移预测构建有向图,采用压缩的联合查找算法(Union Find algorithm)基于对象性预测有效查找连接组件。
(5)构建障碍物集群(见图1)。(a)a图中箭头表示每个单元格对象中心偏移预测;阴影填充部分对应于物体概率不小于0.5的对象单元。(b)b图中固体多边形内的单元格组成候选对象集群。
(6)后期处理。聚类后获得一组包括若干单元格的候选对象集,每个候选对象集包括若干单元格。根据每个候选群体的检测置信度分数和物体高度,来确定最终输出的障碍物集群/分类。分类包括:小机动车、大机动车、非机动车和行人。
(7)障碍物边框检测。边界框的主要目的还是预估障碍物(例如车辆)的边界和方向。同样地,边框也用于可视化障碍物。
3.2 障碍物追踪
3.2.1 数据关联
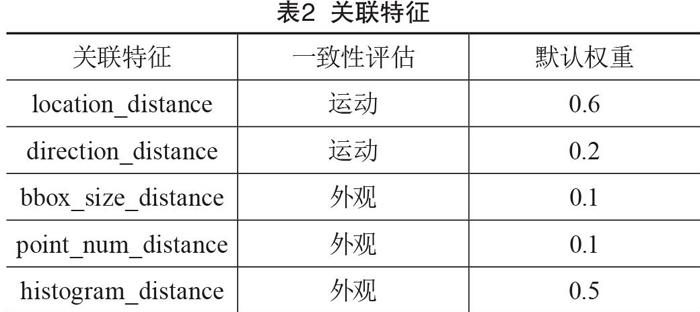
找出当前对象和历史轨迹的一一对应关系。基于匈牙利算法的过程是确定传感器接收到的量测信息和目标源对应关系的过程,是多传感多目标跟踪系统最核心且最重要的过程。计算关联距离时,要考虑5个关联特征(见表2),用以评估对象和轨迹的运动及外观一致性,并为其分配了不同的权重[2]。
从表2可以看出,在计算关联距离时,重点考虑的还是几何距离和两者的形状相似度。计算得到类似的关联距离矩阵后,使用匈牙利算法将对象与轨迹做匹配。
3.2.2 跟踪动态预估
估计当前轨迹的速度。使用卡尔曼滤波来对轨迹的状态进行估计,使用鲁棒统计技术来剔除异常数据带来的影响。
在一系列重复观测中选择速度测量,即滤波算法的输入,包括锚点移位、边界框中心偏移、边界框角点移位等。冗余观测将为滤波测量带来额外的鲁棒性。
卡尔曼更新的观测值为速度。每次观测3个速度值:锚点移位速度、边界框中心偏移速度和边界框角点位移速度。从3个速度中,根据运动的一致性,选出与之前观测速度偏差最小的速度为最终的观测值。根据最近3次的速度观测值,计算出加速度的观测值[3]。
3.3 激光雷达在智能汽车上定位功能
激光雷达在智能汽车上定位功能主要包括建图和匹配定位两个主要模块:一是建图:SLAM(Simultaneous Localization and Mapping),同步定位与地图构建。二是匹配定位:通过当前点云和点云地图进行匹配,可以完成定位。常用的方法有基于Delaunay三角剖分的曲面重建与基于区域生长法的曲面重建。
4 结语
本文主要对激光雷达在智能汽车上使用的优点进行了全面的阐述,对激光雷达在智能汽车上使用优势、工作原理、分割、检测、跟踪和识别、建图和匹配定位等方面进行技术分析,充分考虑到了智能汽车应具备远近程环境感知、智能決策与自主控制功能,以及智能控制复杂的特点,激光雷达在智能汽车上使用,可保证新一代智能汽车安全、节能、舒适行驶。
[参考文献]
[1]宛东,罗建,王洪广. 车置新能源汽车光伏充电装置:201820292245.X[P].2018-07-06.
[2]宛东,罗建,王洪广,等.一种新能源汽车充电放电装置:201810168792.1[P].2018-06-19.
[3]赵汗青,韩宝亮,王珂珂.基于摆动式单线激光雷达的障碍物检测算法[J].装甲兵工程学院学报,2010(4):5.
(编辑 何 琳)
Application of LiDAR in intelligent vehicle
Wan Dong
(Liuzhou Railway Vocational and technical college, Liuzhou 545616, China)
Abstract:With the rapid development of automobile manufacturing industry and intelligent technology, intelligent vehicles will dominate the automobile market. This paper mainly analyzes the role of LiDAR in intelligent vehicles.
Key words:obstacle prediction; tracking and identification; mapping; matching positioning
基金项目:2021年度柳州铁道职业技术学院课题项目;项目名称:新型激光雷达(微机电系统式扫描式雷达)在智能无人驾驶汽车上的研究与应用;项目编号:2021KJB10。
作者简介:宛东(1985— ),男,广西三江人,副教授,学士;研究方向:汽车电气与电子技术,新能源汽车技术。
