车载激光雷达点云数据地面滤波算法综述
2021-01-08黄思源刘利民傅雄军
黄思源,刘利民*,董 健,傅雄军
车载激光雷达点云数据地面滤波算法综述
黄思源1,刘利民1*,董 健1,傅雄军2
1陆军工程大学石家庄校区电子与光学工程系,河北 石家庄 050003;2北京理工大学信息与电子学院,北京 100081
激光雷达在无人驾驶领域占据了重要地位,地面滤波是从激光雷达获取的点云数据中分离和提取地面信息的关键技术。文章首先简述了车载激光雷达(VLS)的发展及分类,并讨论了各类车载激光雷达的优缺点;然后研究了VLS地面滤波算法的发展并进行梳理分类,阐述了地面滤波精度的评估方法和评估标准,并以三种典型的算法为例进行比较分析;最后总结了当前VLS硬件和地面滤波算法的不足,并展望未来发展趋势。
激光雷达;地面滤波;智能驾驶;精度评估;展望
1 引 言
激光雷达(Light detection and ranging,LiDAR)通过检测光脉冲或调制信号测量雷达和目标之间的距离信息,同时通过扫描或者多点对应测量获得方位信息,是一种可以获取目标三维空间信息的主动探测器[1]。作为新型传感器之一,激光雷达为大面积测绘提供了一种快速准确的方案,其获取的点云数据已用于水文建模、海岸监测、森林调查、城市三维可视化、土地覆盖分类以及目标检测等诸多领域。激光雷达按照载荷平台可以分为星载、机载、地基和车载激光雷达(vehicle LiDAR scans, VLS)。在VLS点云数据的处理过程中,地面信息非常重要,但是由于地面点的数量巨大,会降低数据处理速度,也影响对重要目标的分类和识别。提取和滤除地面点可以提高计算速度和降低运算量[2]。因此,地面滤波是从点云数据中准确分离和识别地面点的关键技术[3],该技术可为提取地面信息、规划路径、提高目标识别精度起到重要作用。
2 车载激光雷达发展概况
在2005年美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)举办的无人车挑战大赛中,斯坦福大学车队在车顶安装了多台单线激光雷达完成比赛夺得冠军。该事件打破了前一年无人驾驶车挑战赛中没有参赛队伍完成任务的局面,引起了高度关注,客观上促进了VLS技术的发展。在2007年DARPA无人车城市挑战大赛中,HDL-64E激光雷达助力卡耐基梅隆大学BOSS无人车和斯坦福大学Junior无人车分别获得了比赛冠军和亚军[4]。此后,谷歌推出的无人驾驶汽车采用了激光雷达的技术路线,激光雷达在自动驾驶环境感知系统中的地位开始确立。
VLS的发展时间并不长,可划分为机械式、混合固态和全固态三类。机械式旋转激光雷达是在自动驾驶汽车上最先应用的激光雷达产品,通过持续旋转发射部件,进而达到了全方位的3D扫描。该类型激光雷达具有大扫描视场和高扫描效率,是近些年最常见、应用最广泛也是最成熟的VLS。但是,机械式旋转激光雷达平均失效时间远远不能满足汽车厂商的要求。
为提升使用寿命和实现小型化,VLS开始向固态化过渡。采用微机电系统(micro-electro-mechanical system,MEMS)的激光雷达称为混合固态激光雷达[5]。MEMS激光雷达在产品外形上没有可见的机械旋转部件,但是在内部通过集成在芯片上的微振动镜反射激光,仍可实现360°全方位扫描。该类VLS较好地克服了机械式激光雷达体积较大、只适合于顶装的不足,但是仍然存在接收光路复杂、振动结构影响使用寿命的缺陷。
全固态VLS主要分为光学相控阵(optical phased array, OPA)型和Flash型[6]。在OPA激光雷达中,若干个发射单元组成发射阵列,通过调节阵列中各发射单元的相位差改变激光光束的出射角度,在设定方向上产生互相加强的干涉从而实现高强度的指向光束。OPA激光雷达具有无需机械转动即可改变扫描方向的优势,而这种优势应用于激光雷达测量中,则彻底消除了机械式激光雷达和混合式激光雷达的宏观/微观机械转动,具有无惯性器件、精确稳定、方向可任意控制等优点。Flash型激光雷达属于非扫描式工作方式,其采用单脉冲直接向各个方向漫射,仅需一次快闪便能照亮整个场景,利用飞行时间成像仪接收发射信号并形成2D或3D图像,避免了扫描过程中目标与激光雷达相对位移带来的运动畸变。但是Flash型激光雷达视场角受限,探测距离超过一定范围(几十米)后,返回的光子数量有限,探测精度明显降低。各类车载激光雷达对比如表1所示。
3 车载激光雷达地面滤波算法发展
近年来,相关研究人员针对VLS提出了多种地面滤波算法,这些算法可以按照不同的标准分类,例如,按照地面类型可以分成对城市路面的滤波和对野外植被的滤波算法,按照算法运行次数可以分为单步滤波算法与迭代滤波算法[7]等。经过对VLS地面滤波算法的梳理,按照点云划分及处理方法将目前主流算法分为四类,分别是:基于空间划分的地面滤波算法、基于扫描线的地面滤波算法、基于局部特征的地面滤波算法和基于附加信息的地面滤波算法。
3.1 基于空间划分的地面滤波算法
基于空间划分的算法是通过将点云数据按照一定规则划分到紧密相连的网格阵列,并对这些网格进行数据处理的滤波。基于空间划分算法分为两类:一是基于二维网格的滤波,二是基于三维体素的滤波,如图1所示。

表1 车载激光雷达对比表
3.1.1 基于二维网格的地面滤波算法
基于网格的滤波是对点云空间的水平面进行网格划分,每个网格内所有高程的点组成一个集合(图1(b)所示),将数据网格化后按网格属性对其进行分类[8]。这种算法通常假定在某一区域内物体高于地面,通过计算高度差来确定某一点是否为地面。Thrun等[9]提出了一种基于最小-最大高度差的滤波算法,计算同一网格中高度最大和高度最小点之间的高度差。高度差小于预定阈值的网格被归类为地面,该算法广泛应用于2007年DARPA城市挑战赛,但是这种算法无法解决分割不足问题。Douillard等人[10]提取了网格的平均高度,并计算网格之间的最大坡度值作为识别地面的依据,该算法可以避免高度过高的噪声点对滤波结果的影响,但是运算量巨大。Kammel和Pitzer等[11]评估每个网格中的垂直位移,如果位移超过给定阈值,则将网格标记为非地面;但是由于网格占有一定的面积,所以算法标记的地面区域和实际地面区域之间有明显的偏差。Guo等人[12]利用网格图构建马尔可夫随机场,将每个网格分别标记为可达区域、可驱动区域、障碍区域或未知区域,但是网格大小对该算法结果影响较大。
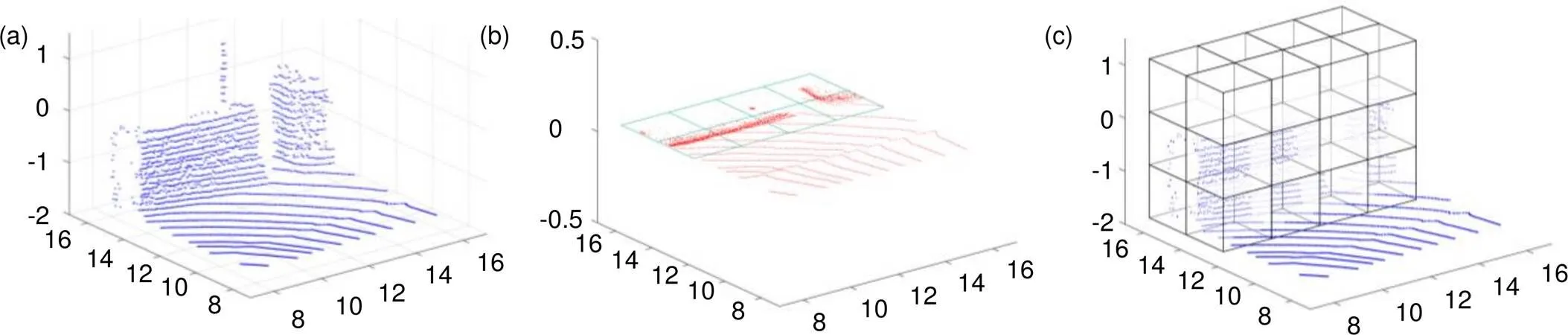
图1 点云空间划分算法。(a) 局部点云;(b) 网格划分;(c) 体素划分
基于二维网格的地面滤波算法相对简单,但是只使用地面局部信息而不是全局连续性信息来滤波,所以性能非常敏感,很容易受到观测噪声和传感器外部校准的影响。
3.1.2 基于三维体素的地面滤波算法
三维体素是在平面网格的基础上,根据点云的高程将三维空间分割成若干集合(图1(c)所示)。该类算法一般通过判断体素内点的高度平均值或方差值将地面体素和非地面体素进行区分[13]。首先,对体素分组,如果平均值之间的差异小于给定阈值,并且方差之间的差异小于单独阈值,则分为一组;然后,判断体素组的垂直高度,如果体素组垂直高度超过给定阈值,则为非地面点,反之,则认为体素包含地面点[14]。Chen等人[15]在划分扇区状的体素后,使用高斯过程增量样本一致性滤除地面,能够在斜坡地面取得理想的滤波效果,但是该算法是一种迭代算法,算法实时性不够理想且滤波结果受阈值影响大。Guan等人[16-17]开发了基于体素的向上生长滤波,判断每个体素上方相邻的九个体素,当相邻体素内含探测点的情况下继续向上生长判断,否则终止生长并判断最高的体素是否高于阈值,该算法可以快速有效地处理地面起伏较大的场景,但是体素网格的划分会影响点的判断。Husain等人[18]利用阈值圆增长的概念,用高度值标准差在内的相关阈值参数来检查体素是否属于地面,该算法的优点是计算时间效率高,不依赖于激光强度、激光扫描返回数等附加信息。
基于三维体素的地面滤波算法充分利用相邻体素的信息,相对于基于网格的地面滤波算法,滤波过程更加复杂,但是分类精度更优。
3.2 基于扫描线的地面滤波算法
VLS点云数据是由若干扫描线所获取的点组成的,当激光雷达中心轴垂直于理想平面扫描时,形成的扫描线接近于圆形,在前方有障碍物或其它情况下扫描线会发生变化,扫描线变化情况如图2所示。基于扫描线的地面滤波利用上述特点,通过检测扫描线及扫描线之间的变化,实现检测障碍物与地面。
在城市环境中,可以根据线间距压缩度对激光点进行初步分组,例如,与道路相比,墙壁具有更高的线间距压缩度。Montemerlo等人[19]分析了由激光雷达扫描的连续线之间的距离,将间距低于阈值的相邻扫描线分类为障碍物,但是这种算法仅适用于具有明显障碍物的公路环境。Himmelsbach等人[20]将三维点云按扫描线划分到圆形网格中,每个圆网格的最低点被用来寻找直线段,其中坡度小于阈值的线段被标记为属于地面,该方法运行时间短且适用于复杂地面。文献[21]采用一种窗口滤波算法,将扫描线上的点分割成若干组连续的道路横断面,通过检测到的路缘点对每组道路横断面上的非接地点进行滤波,但是该算法参数值选取尤其是窗口长度的选取对滤波效果影响巨大。Hu[22]提出了一种基于扫描线的算法,首先检测局部最低点,然后将其作为种子,利用坡度和高程生长成地面段。为了在遮挡场景中检测路面,文献[23]提出了一种基于环压缩分析和最小二乘法的路缘石检测算法,但是该算法不适用复杂道路情况。
由于地面总是低于其他物体,且其测量点是连续的,所以现有的提取地面点的算法几乎都是基于点的高程和坡度的。但是,由于存在斜坡,或道路可能不平坦,所以高程不是很全面的判断标准。为解决这个问题,Zhou等人[24]设计了一种基于笛卡尔坐标的地面分割算法,该算法不仅适用于平坦的公路路面,也适用于有坡度的地面。Yin等人[25]用球面坐标代替笛卡尔坐标,算法不假设道路位于最低位置,利用方位角和径向距离球面坐标作为判断标准,通过球坐标系中径向距离曲线的断点和转折点分割地面点和非地面点,该算法可以避免过度分割和欠分割。文献[26]采用准平面区域算法和区域邻接图表示算法,根据边界的局部高度差提取路面与非路面之间的轮廓线,该算法对小噪声点具有较强的鲁棒性,但是对参数的依赖较强。Wojke等人[27]提出了一种相邻点连线滤波算法,通过连接同一个水平角度上的连续相邻三个激光扫描线上的点,判断向量夹角以及点之间的距离,若在阈值范围内则可被分类为地面点,该算法在文献[28]中得到成功的应用。文献[8]将每个LiDAR扫描线通过最小二乘线性回归划分为线段,然后在线段节点上建立马尔可夫随机场(Markov random field, MRF)能量函数,通过图形切割来解决在非平坦地面的滤波问题,该算法适用于扫描线存在较长的平滑线段的情况,在野外等复杂地形难以取得良好滤波效果。
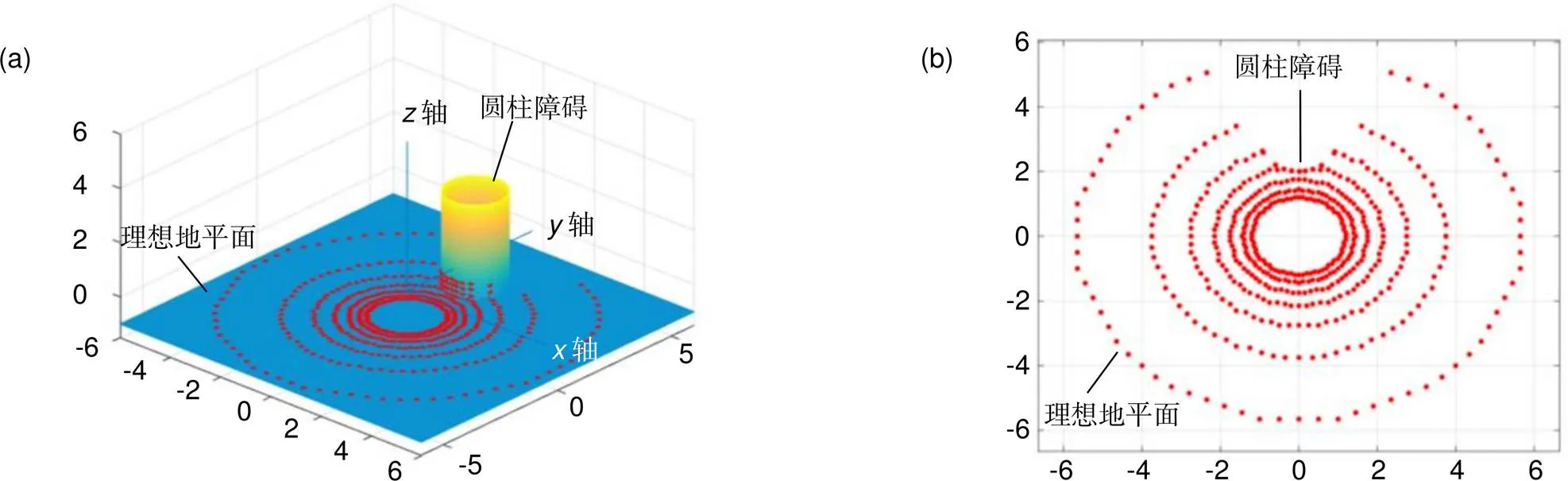
图2 扫描线变化示意图。(a) VLS扫描场景仿真;(b) 扫描线水平投影
基于扫描线的滤波算法在地面平坦且具有明显障碍物的情况下能取得比较理想的滤波效果,但是在路面崎岖不平或具有一定坡度的情况下,扫描线分布不均,滤波所需的参数也随之增大。因此,该类算法仅适用于城市道路环境。
3.3 基于局部特征的地面滤波算法
基于局部特征的算法采用对局部点集进行模型拟合或特征检测的算法,实现对地面点的滤波,通常分为基于模型的算法和基于聚类的算法两种。
3.3.1 基于模型的地面滤波算法
基于模型的滤波算法通常将局部点集进行直线或平面拟合,并与通用模型进行匹配从而识别地面点[29]。Moosman等人[30]提出一种局部凸面标准,计算种子点与相邻点间的向量夹角以分割地面和物体,其特点是能充分利用所有点的三维信息,但是平均每帧的处理时间约为每帧数据获取时间的3.5倍,实时性难以达到要求。张名芳等人[31]提出了一种基于三维不规则点云的地面分割算法,在构建连接图的基础上建立了相应的测量代价和平滑性代价函数模型,得到地面高度最优估计值,实现地面点与非地面点的分割,但处理大规模场景时该算法计算量较大。McElhinney等人[32]通过将二维三次样条拟合引入道路横断面来提取路面。然而,由于很难确定道路边缘的准确性,这些算法只能实现粗糙的道路检测。Asvadi等人[33]提出了一种基于分段平面拟合的算法,此算法解决了在具有一定弧度的曲面地面的滤波问题,但在其他情况下效果很差。Chen等[34]提出了一种基于稀疏高斯过程回归(Gaussian process regression, GPR)的新型算法,首先将扫描的三维点映射到三维网格图,然后利用具有稀疏协方差函数的迭代二维GPR直接对地面进行建模,该算法可用于分割各种扫描情况的地面点。文献[35]将采集到的点云数据连成Mesh图,根据地面点与其他点在Mesh图上的属性不同,找到地面基准点并将地面属性蔓延至其它各点,直到将所有的地面点分离,避免了通过计算各节点的局部法向量等一系列的复杂运算来判断节点属性,提高了算法效率,但还不能做到对不同情况的地面进行分类。
基于模型的滤波算法根据其采用的模型可应用于不同的场景,选用特定场景的滤波模型可以取得良好的滤波效果,但是拟合区域(或窗口)大小的选取对滤波结果的影响较大。
3.3.2 基于聚类的地面滤波算法
在一些研究中,通过考虑点之间的联系来获得点云分割,并从分割的聚类中识别出属于地面的部分。欧几里得聚类方法是将点云数据分割为单独的聚类的常用方法。在该方法中,使用固定的阈值半径。但是,固定阈值会带来分割不足和过度分割的问题,为了避免这些问题,文献[36]提出了一种基于自适应阈值的欧几里德聚类算法。苏本跃等人[37]用K-means聚类算法对点云进行聚类,对每个类中的点,根据点到聚类中心的欧氏距离和邻近点曲率变化判断是否为噪声点,进而去除大量外部噪点。然而上述算法均不适用于大规模散乱点云的去噪处理,而且时间开销大。Biosca等[38]从邻近点提取局部点特征,利用欧氏聚类和区域增长算法快速分割地面和非地面,但是选取不同种子点将得到不同的分割区域,导致鲁棒性较差。
基于聚类滤波算法以欧氏距离作为主要的判断参数,能够打破按照空间划分或扫描线处理点云的限制,但是,参数选取和计算量较大是该类算法的明显缺陷。
3.4 基于附加信息的地面滤波算法
激光雷达数据获取的信息有限,使用这些数据难以取得较高的地面滤波精度。当前,多传感器集成已成趋势,学者们不断尝试通过融合其它设备获取附加信息来过滤地面点。
一些算法使用激光雷达本身获取的各种附加信息(反射强度和反射次数等)来分离地面和非地面点。关于利用激光反射强度的研究在机载激光雷达遥感领域已经非常普遍[39],但在无人驾驶领域使用激光强度法仍处于早期阶段[40]。Franceschi[41]提出了一种基于激光反射强度的滤波方法,以区分地面和岩石。随着硬件技术的发展,扫描仪在获取目标点云时会返回多个目标回波。Pirotti[42]从点云选择地面候选点时,在使用渐进形态滤波器前考虑了激光的顺序返回数和振幅。
还有一些算法使用除VLS以外的传感器。Boyko和Funkhouser[43]将机载激光雷达和VLS的点云进行合并,提出了一种从大规模道路环境中的密集点云中提取平坦道路的方法,该算法不仅提高了地面滤波的精度,还克服了机载激光雷达只能检测建筑物顶端的缺点。文献[44]采用RGB深度相机和LiDAR进行融合,从而完成滤波和相对定位,其优点是RGB深度相机获得的区域深度信息可以弥补激光雷达未探测区域的信息空白。Lichti[45]利用四个通道(RGB+红外)提出了一种使用有监督的参数分类将主题类标签分配给点的算法。但是,这种算法只能在良好的条件下才能正常工作。这些算法依赖于设备,它们的应用受到依赖性的限制。
3.5 其它地面滤波算法
除上述滤波算法外,还有一些地面滤波算法由于与VLS点云数据适应性较差,算法应用范围有限,仍待进一步改进。
3.5.1 基于投影的地面滤波算法
基于投影的地面滤波算法是将笛卡尔坐标系点云投影到假定的平面上,根据区域内点云密度或距离信息的变化分离地面点。采用的平面可以是平面,该算法通常结合占用网格法[46]分析网格间点密度的变化从而判断是否为地面点[47];也可以将3D数据投影到以激光雷达旋转轴为轴的圆柱体上,每个点的数据用距离信息表示,通过判断距离突然变化的区域分离地面点[48]。基于投影密度的地面滤波算法优点是可以轻松融合多个传感器,映射是直截了当的。然而,区分障碍物和地面的困难仍然存在,虽然这些算法适用于具有水平地平面和垂直墙结构的环境,但会造成大部分可用信息的丢失,这些算法不适合可靠地检测倾斜物体,如植被或山丘。基于投影的地面滤波算法是早期经典算法之一,由于滤波精度不高导致其目前更多地应用于2D数据而非3D数据。
3.5.2 基于形态学的地面滤波算法
形态滤波器[49]是对点云数据进行网格化,并通过对网格高程值的放大和侵蚀来提取地面点。在此基础上,渐进形态滤波器[50]通过逐渐增大窗口大小并根据窗口大小使用高程差阈值来保留地面点并移除非地面物体。

表2 交叉表
Pirotti[42]使用多维网格对地面候选点应用自定义渐进式形态滤波器,该算法不需要计算昂贵的迭代,并且可以对速度进行优化,但是对反射率信息的依赖很强。形态滤波算法是最早应用于机载激光雷达数据的经典滤波算法之一,但在数据处理之前一般需要进行插值和网格化,会造成原始地形特征的破坏,且仅以窗口最低点作为地面点适用性不强。以上特点导致基于形态学的地面滤波算法在VLS数据上应用受到限制。另外,结构窗口的尺寸、高程阈值的设定是影响滤波的主要因素,窗口过小不能有效滤除,窗口过大时容易丢失细节信息。
4 地面点云滤波算法评估
VLS的应用场景多样,算法对不同场景的适应性也不同,因此滤波精度是衡量算法滤波效果的重要标准。评估滤波精度需要确定点云中每一个点是否属于地面点,但是点云数据量庞大,因此评估滤波结果具有一定的难度。
4.1 滤波结果的评估方法
滤波结果的评估方法主要有以下三种:
4.1.1 人工标定法
人工标定法是指在已经全部将点云进行地面/非地面分类的情况下,将滤波结果与标定结果进行对比。标定过程工作量巨大,但结果对比过程简单,该方法主要适用于小数据量环境或已经标定的公开数据集。
4.1.2 目视检查法
点云地面滤波的结果通常使用不同颜色的激光点云图表示,目视检查法是通过人工去判读算法对具有明显特征的较小区域的滤波结果是否正确。
4.1.3 随机抽样法
在缺乏人工标定且需要对细节部分滤波效果进行评估的情况下,可以多次随机选择区域,在区域内标注地面点和非地面点,与滤波结果相比较。该方法借鉴了概率论中随机抽样的思想,评估速度较快但是结果受人为因素影响较大。
4.2 滤波精度的评估标准
在评估滤波结果后产生的主要参数有四个,分别为:1) 算法正确分类的地面点数;2) 表示地面点被误分为非地面点的个数;3) 表示非地面点被误分为地面点的个数;4) 表示算法正确分类的非地面点个数。滤波精度的评估标准通常有以下两种:
4.2.1 交叉表法
交叉表如表2所示,其中,和分别表示参考数据中真实的地面点个数和非地面点个数;和分别表示滤波结果中地面点个数和非地面点个数。
根据交叉表的结构,将误差分为三类[51]:
1) Ⅰ类误差(漏分误差/拒真误差),是指地面点被错分为非地面点的概率:

2) Ⅱ类误差(错分误差/纳伪误差),是指非地面点错分为地面点的概率:
3) 总误差,反映了分类结果与参考数据不一致的概率:
Ⅰ类误差、Ⅱ类误差反应了算法的适应性,总误差反应了算法的可行性,总误差越小,表明滤波效果就越好。
4.2.2 Kappa系数法
Kappa系数法[52]是基于混淆矩阵的用于一致性检验方法,该方法能够衡量分类精度[53]。点云滤波的Kappa系数定义如下

Kappa系数计算结果为-1~1,但通常Kappa系数是在0~1间,可分为五组来表示不同级别的一致性:0.0~0.20极低的一致性(slight)、0.21~0.40一般的一致性(fair)、0.41~0.60中等的一致性(moderate)、0.61~0.80高度的一致性(substantial)和0.81~1.0几乎完全一致(almost perfect)。
4.3 典型算法的实现与对比
为检验算法滤波效果,采用人工标定的方法标定了一帧VLS点云数据。考虑到目前旋转式激光雷达仍是应用最广泛的VLS,所以选取的点云数据来自于KITTI公开数据集[54]2011_09_26_drive_ 0001_extract,激光雷达型号为Velodyne HDL-64E。场景为城市街道(包括公路、轻轨、建筑、汽车、围墙、树木等),如图3所示。取||<20 m且||<20 m范围内的点,其中,地面点64797个,非地面点33850个,如图4所示,绿色的点表示地面点,蓝色的点表示非地面点。从基于空间划分的地面滤波算法、基于扫描线的地面滤波算法、基于局部特征的地面滤波算法中各选择一种比较典型的算法进行比较,分别为向上生长滤波算法[16]、相邻点连线滤波算法[28]、坡度值区域增长滤波算法[38]。分别利用算法时间/空间复杂度、交叉表法和Kappa系数法对上述算法进行评估。
为观察比较参数选取对滤波结果的影响,在合理的参数范围内分别对三种算法的不同参数组合进行结果分析,其中,向上生长滤波算法共275组,相邻点连线滤波算法共253组,坡度值区域增长滤波算法共451组。参数选取方式和滤波结果对比如表3所示。
表中,为点云中点的数量,为体素垂直分层的层数。分析最优滤波结果可知,向上生长滤波算法最优结果的I类误差明显小于其他两种算法,但是Ⅱ类误差却是最高的,说明其将过多的非地面点错分为地面点;相邻点连线滤波算法最优结果的Kappa系数高于向上生长滤波算法,但是I类误差在三种算法中最高,说明算法的主要问题是将过多的地面点错分为非地面点;坡度值区域增长滤波算法最优结果高于其他两种算法,说明在选取的参数比较理想的情况下,该算法滤波精度最高。但是最优结果并不能说明算法受参数变化的影响程度,将同一算法所有滤波结果按照Kappa系数升序排列,结果分别如图5(a)~5(c)所示,其所对应的最优滤波结果分别如图5(d)~5(f)所示。

图3 点云数据获取场景

图4 标定结果
由图5(a)可知,在向上生长滤波算法滤波结果中,虽然不同参数值对I类误差和II类误差会产生较大影响,但是总误差和Kappa系数受参数影响较小。由图5(d)可知,该算法对于局部凸起物(例如铁轨)滤波能力不强,对于高度阈值以下的点不能做到较好的分类(例如汽车),但是对于高度较高的杆状物体(例如路灯)能够做到很好的识别,所以该算法更适用于森林树木检测或道路路灯识别领域。由图5(b)可知,相邻点连线滤波算法受参数值改变的影响程度小于其他两种滤波算法,其Kappa系数整体上优于向上生长滤波算法,由图5(e)可知,该算法能够有效克服向上生长滤波算法对于局部凸起物滤波能力不足的缺点,但是由于该算法只对相邻扫描线上处于同方位角的三个点进行检测,在对非地面的平面(例如窗台、车顶)或两条距离较大的扫描线检测时易出现错误判断,将其误认为地面;由图5(c)可知,坡度值区域增长滤波算法最优结果优于其它两种算法,对局部凸起物能够有效识别,也能够有效减少将地面点误判为非地面点的情况,由图5(f)可知,该算法滤波效果受参数值变化的影响很大,尤其对坡度阈值敏感,当扫描点之间高程差较小但坡度值较大时会出现判断失误,例如:最接近激光雷达的扫描线,由于点与点之间水平距离较小,计算其点间坡度值通常高于其他地面区域。解决该问题的方法是调整坡度阈值,但是选取最优坡度阈值需多次试验,所以当激光雷达工作场景之间差异过大时,该算法并不适用。
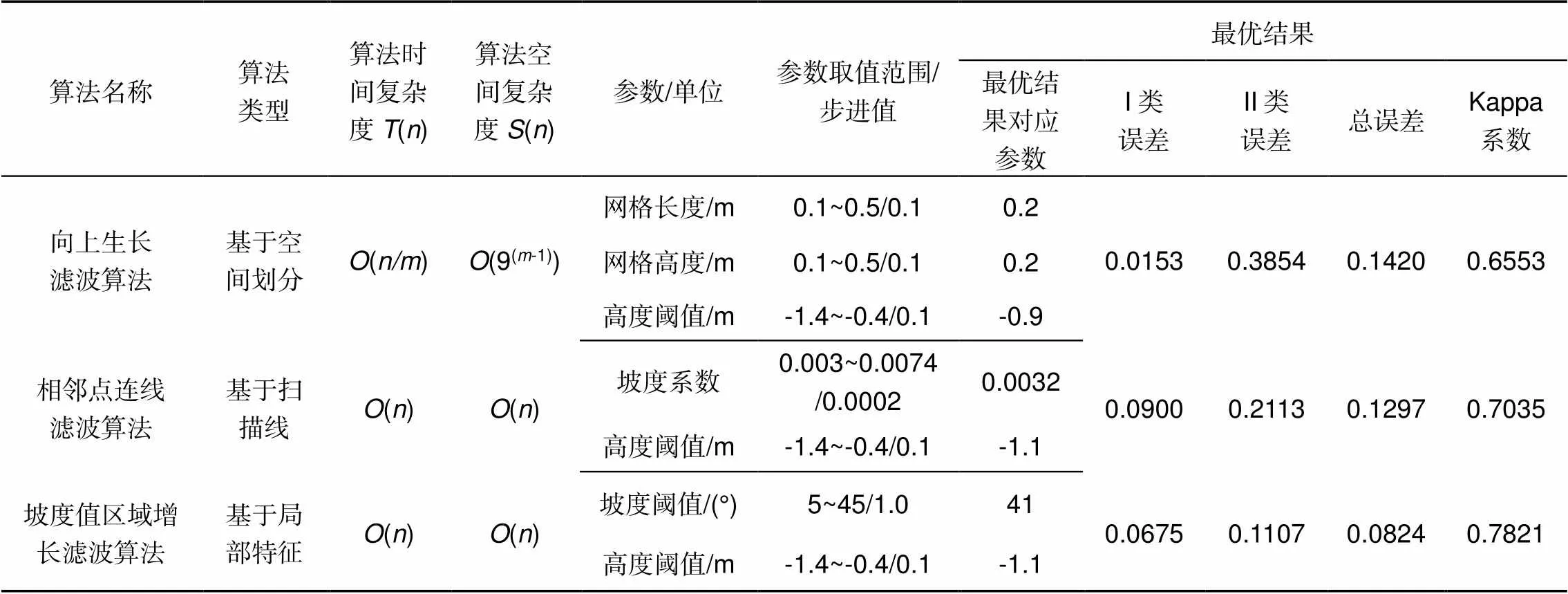
表3 滤波算法对比
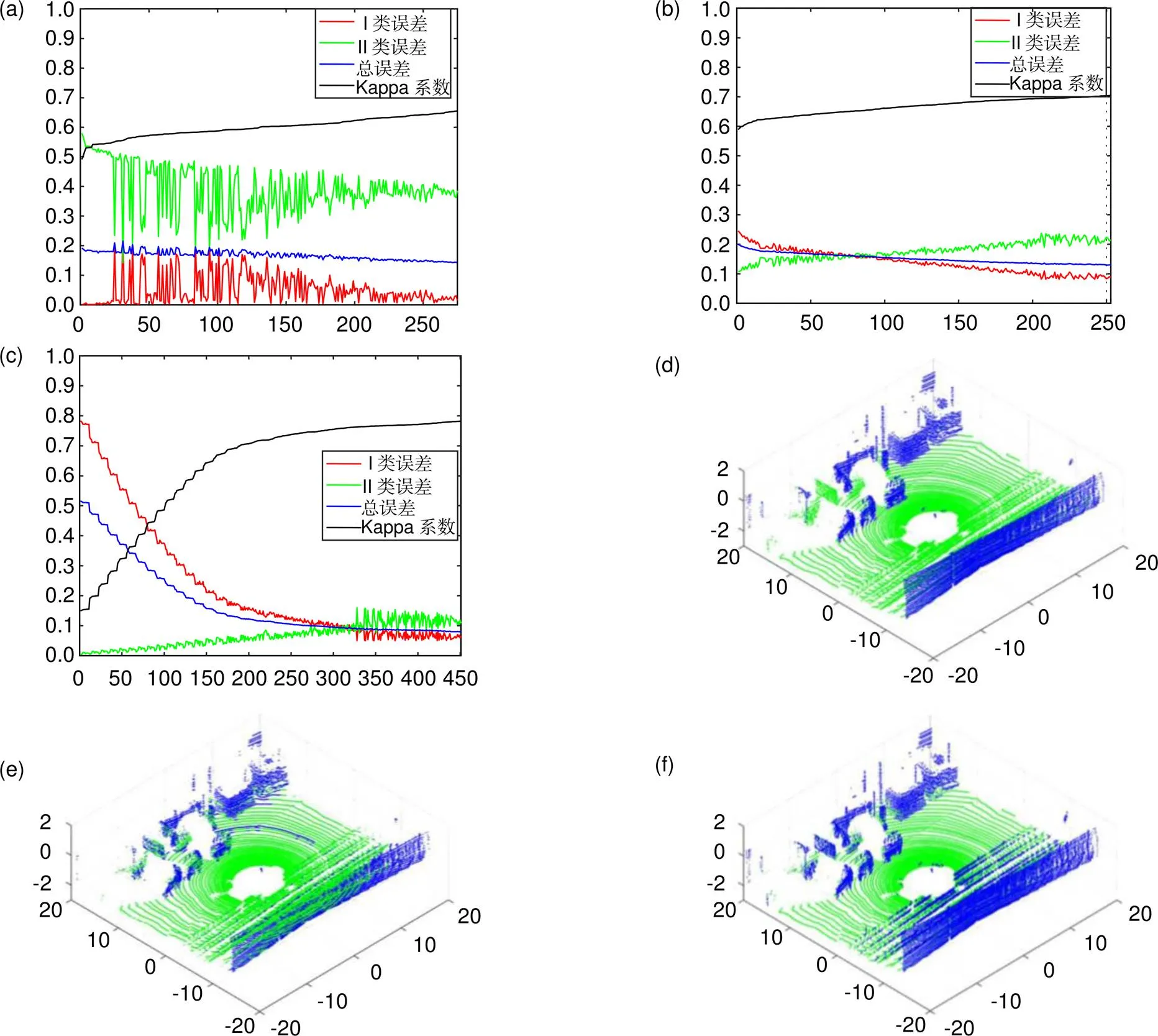
图5 三种典型地面滤波算法结果。(a) 向上生长滤波算法结果;(b) 相邻点连线滤波算法结果;(c) 坡度值区域增长滤波算法结果;(d) 向上生长滤波算法结果点云图;(e) 相邻点连线滤波算法结果点云图;(f) 坡度值区域增长滤波算法结果点云图
5 总结与展望
VLS地面滤波算法与VLS硬件的发展息息相关。目前VLS还面临几个关键问题:1) “镜面黑洞”效应,即激光雷达照射反射率较高且非正对激光雷达的物体时,难以检测到返回信号;2) 多辆使用VLS的路上车辆之间可能产生串扰,导致距离欺骗,需要统一标准进行规范;3) 成本偏高,虽然固态激光雷达价格低于机械式激光雷达,但是单个固态激光雷达不能实现水平360°扫描探测,需要多个激光雷达整体配置以完成全方位探测,整体配置后是否还具有价格优势有待考虑。VLS发展趋势主要包含以下几个方面:1) 从满足自动驾驶的迫切需求看,低成本化、小型化、固态化是未来的总体发展趋势;2) 从数据预处理的角度看,激光雷达与人工智能技术的融合是未来的发展趋势,通过人工智能技术对数据进行预处理,有选择性地对感兴趣区域进行探测,能够有效降低数据处理压力;3) 从信息融合的角度看,激光雷达与其他传感器的结合正在逐渐深入,激光雷达和视觉相机的结合将同时获得探测目标的三维空间信息和色彩纹理信息,激光雷达和毫米波雷达结合将克服恶劣天气的影响,激光雷达与5G发射接收技术结合将解决激光雷达组网和数据云处理的问题。
现有的VLS地面滤波算法虽然能解决某些特定情况下地面点的滤波问题,但还存在以下几点不足:1) 场景的复杂和多样造成了地面滤波算法的多元性和特异性,算法单一适用于某一场景,而且往往精度越高,适应性越差,使用范围相当有限[55];2) 现有滤波算法在识别被严重遮挡的场景时会出现问题,且对近地植被进行滤波比较困难;3) 地面点分割精度不足,过分割和欠分割的现象仍然比较明显。
目前,VLS地面点滤波算法呈现以下趋势:1) 提升算法的自适应性,对典型算法进行优化和封装,将其作为成熟的模块,使算法具有扩展性和可移植性,以面对各类复杂多变的场景;2) 根据VLS的工作原理,越来越多的研究者尝试采用球座标系或图像处理的方法对点云进行分析和滤波;3) 随着机器学习的发展,基于机器学习的地面点云滤波算法应运而生,此类算法的主要思路是选择合适的机器学习方法,利用标注好的点云样本来训练模型,最后通过训练好的模型进行在线点云分离[56];4) 随着计算机性能的提高,学者尝试牺牲算法空间复杂度以获得更短的运算时间,滤波算法逐渐由点群分析向单点分析过渡,有效减少过分割和欠分割的现象。
地面滤波是一项具有广阔发展前景的技术,随着车载激光雷达的普及和滤波精度的提升,该技术将在无人驾驶、军事侦察、数字地图等领域发挥越来越重要的作用。
[1] Liu B, Yu Y, Jiang S. Review of advances in LiDAR detection and 3D imaging[J]., 2019, 46(7): 190167. 刘博, 于洋, 姜朔. 激光雷达探测及三维成像研究进展[J]. 光电工程, 2019, 46(7): 190167.
[2] Habermann D, Hata A, Wolf D,. 3D point clouds segmentation for autonomous ground vehicle[C]//, Niteroi, Brazil, 2013: 143–148.
[3] Liu Z Q, Huang S H, Ma Q,. LiDAR filtering algorithm based on mixed least squares and total least squares[J]., 2019, 42(2): 30–33. 刘志青, 黄沈华, 马琪, 等. 基于混合最小二乘与总体最小二乘的激光雷达滤波算法[J]. 测绘与空间地理信息, 2019, 42(2): 30–33.
[4] Qiu C X. Lidar and the industrialization of automatic driving[J]., 2018(6): 37–47. 邱纯鑫. 激光雷达与自动驾驶的产业化之路[J]. 人工智能, 2018(6): 37–47.
[5] Chen X D, Zhang J C, Pang W S,. Key technology and application algorithm of intelligent driving vehicle LiDAR[J]., 2019, 46(7): 190182. 陈晓冬, 张佳琛, 庞伟凇, 等. 智能驾驶车载激光雷达关键技术与应用算法[J]. 光电工程, 2019, 46(7): 190182.
[6] Chen J Y, Shi Y C. Research progress in solid-state LiDAR[J]., 2019, 46(7): 190218. 陈敬业, 时尧成. 固态激光雷达研究进展[J]. 光电工程, 2019, 46(7): 190218.
[7] Douillard B, Underwood J, Vlaskine V,. A pipeline for the segmentation and classification of 3D point clouds[C]//, Berlin, Heidelberg, 2014: 585–600.
[8] Zhu Z, Liu J L. Graph-based ground segmentation of 3D LIDAR in rough area[C]//, Woburn, MA, USA, 2014.
[9] Thrun S, Montemerlo M, Dahlkamp H,. Stanley: the robot that won the DARPA grand challenge[J]., 2006, 23(9): 661–692.
[10] Douillard B, Underwood J, Melkumyan N,. Hybrid elevation maps: 3D surface models for segmentation[C]//, Taipei, Taiwan, China, 2010: 1532–1538.
[11] Kammel S, Pitzer B. Lidar-based lane marker detection and mapping[C]//, Eindhoven, Netherlands, 2008: 1137–1142.
[12] Guo C Z, Sato W, Han L,. Graph-based 2D road representation of 3D point clouds for intelligent vehicles[C]//, Baden-Baden, Germany, 2011: 715–721.
[13] Douillard B, Underwood J, Kuntz N,. On the segmentation of 3D LIDAR point clouds[C]//, Shanghai, China, 2011: 2798–2805.
[14] Zhao G Q, Yuan J S. Curb detection and tracking using 3D-LIDAR scanner[C]//, Orlando, FL, USA, 2012: 437–440.
[15] Chen T T, Dai B, Liu D X,. 3D LIDAR-based ground segmentation[C]//, Beijing, China, 2011: 446–450.
[16] Guan H Y, Yu Y T, Ji Z,. Deep learning-based tree classification using mobile LiDAR data[J]., 2015, 6(11): 864–873.
[17] Guan H Y, Yu Y T, Li J,. Pole-like road object detection in mobile LiDAR data via supervoxel and bag-of-contextual-visual-words representation[J]., 2016, 13(4): 520–524.
[18] Husain A, Vaishya R C. A time efficient algorithm for ground point filtering from mobile LiDAR data[C]//, Allahbad, India, 2016.
[19] Montemerlo M, Becker J, Bhat S,. Junior: the stanford entry in the urban challenge[J]., 2008, 25(9): 569–597.
[20] Himmelsbach M, Hundelshausen F V, Wuensche H J. Fast segmentation of 3D point clouds for ground vehicles[C]//, San Diego, CA, USA, 2010: 560–565.
[21] Yang B S, Fang L N, Li J. Semi-automated extraction and delineation of 3D roads of street scene from mobile laser scanning point clouds[J]., 2013, 79: 80–93.
[22] Hu X Y, Li X K, Zhang Y J. Fast filtering of LiDAR point cloud in urban areas based on scan line segmentation and GPU acceleration[J]., 2013, 10(2): 308–312.
[23] Hata A Y, Wolf D F. Feature detection for vehicle localization in urban environments using a multilayer LIDAR[J]., 2016, 17(2): 420–429.
[24] Zhou Y, Wang D, Xie X,. A fast and accurate segmentation method for ordered LiDAR point cloud of large-scale scenes[J]., 2014, 11(11): 1981–1985.
[25] Yin H L, Yang X H, He C. Spherical coordinates based methods of ground extraction and objects segmentation using 3-D LiDAR sensor[J]., 2016, 8(1): 61–68.
[26] Hernandez J, Marcotegui B. Filtering of artifacts and pavement segmentation from mobile LiDAR data[C]//, Paris, France, 2009.
[27] Wojke N, Häselich M. Moving vehicle detection and tracking in unstructured environments[C]//, Saint Paul, MN, USA, 2012: 3082–3087.
[28] Fan J Y. Object recognition based on sparse 3D point cloud in urban environment[D]. Harbin:Harbin Institute of Technology, 2018: 12–13. 樊建崟. 在城市道路场景下基于稀疏三维点云的目标识别[D]. 哈尔滨: 哈尔滨工业大学, 2018: 12–13.
[29] Yuan X, Zhao C X, Cai Y F,. Road-surface abstraction using ladar sensing[C]//, Hanoi, Vietnam, 2008: 1097–1102.
[30] Moosmann F, Pink O, Stiller C. Segmentation of 3D lidar data in non-flat urban environments using a local convexity criterion[C]//, Xi'an, China, 2009: 215–220.
[31] Zhang M F, Fu R, Guo Y S,. Road segmentation method based on irregular three dimensional point cloud[J]., 2017, 47(5): 1387–1394. 张名芳, 付锐, 郭应时, 等. 基于三维不规则点云的地面分割算法[J]. 吉林大学学报(工学版), 2017, 47(5): 1387–1394.
[32] McElhinney C, Kumar P, Cahalane C,. Initial results from European road safety inspection (EURSI) mobile mapping project[C]//, Newcastle upon Tyne, UK, 2010: 440–445.
[33] Asvadi A, Premebida C, Peixoto P,. 3D lidar-based static and moving obstacle detection in driving environments: an approach based on voxels and multi-region ground planes[J].2016, 83: 299–311.
[34] Chen T T, Dai B, Liu D X,. Sparse Gaussian process regression based ground segmentation for autonomous land vehicles[C]//, Qingdao, China, 2015: 3993–3998.
[35] Dong M, Chen T Z, Yang H. Research on separation method of ground laser point cloud based on mesh[J]., 2019, 45(6): 32–36, 44. 董敏, 陈铁桩, 杨浩. 基于Mesh的地面激光点云分离方法研究[J]. 计算机工程, 2019, 45(6): 32–36, 44.
[36] Rusu R B. Semantic 3D object maps for everyday manipulation in human living environments[J]., 2010, 24(4): 345–348.
[37] Su B Y, Ma J Y, Peng Y S,. Algorithm for RGBD point cloud denoising and simplification based on K-means clustering[J]., 2016, 28(10): 2329–2334, 2341. 苏本跃, 马金宇, 彭玉升, 等. 基于K-means聚类的RGBD点云去噪和精简算法[J]. 系统仿真学报, 2016, 28(10): 2329–2334, 2341.
[38] Biosca J M, Lerma J L. Unsupervised robust planar segmentation of terrestrial laser scanner point clouds based on fuzzy clustering methods[J]., 2008, 63(1): 84–98.
[39] Zhou W Q. An object-based approach for urban land cover classification: integrating LiDAR height and intensity data[J]., 2013, 10(4): 928–931.
[40] Tatoglu A, Pochiraju K. Point cloud segmentation with LiDAR reflection intensity behavior[C]//, Saint Paul, MN, USA, 2012: 786–790.
[41] Franceschi M, Teza G, Preto N,. Discrimination between marls and limestones using intensity data from terrestrial laser scanner[J]., 2009, 64(6): 522–528.
[42] Pirotti F, Guarnieri A, Vettore A. Ground filtering and vegetation mapping using multi-return terrestrial laser scanning[J]., 2013, 76: 56–63.
[43] Boyko A, Funkhouser T. Extracting roads from dense point clouds in large scale urban environment[J]., 2011, 66(6): S2–S12.
[44] Song H, Choi W, Kim H. Robust vision-based relative-localization approach using an RGB-depth camera and LiDAR sensor fusion[J]., 2016, 63(6): 3725–3736.
[45] Lichti D D. Spectral filtering and classification of terrestrial laser scanner point clouds[J]., 2005, 20(111): 218–240.
[46] Thrun S. Learning occupancy grid maps with forward sensor models[J]., 2003, 15(2): 111–127.
[47] Kammel S, Ziegler J, Pitzer B,. Team AnnieWAY's autonomous system for the 2007 DARPA urban challenge[J]., 2008, 25(9): 615–639.
[48] Hoover A, Jean-Baptiste G, Jiang X,. An experimental comparison of range image segmentation algorithms[J]., 1996, 18(7): 673–689.
[49] Kilian J, Haala N, Englich M. Capture and evaluation of airborne laser scanner data[C]//, Vienna, 1996, 31: 383–388.
[50] Zhang K Q, Chen S C, Whitman D,. A progressive morphological filter for removing nonground measurements from airborne LIDAR data[J]., 2003, 41(4): 872–882.
[51] Huang Z W, Liu F, Hu G W. Improved method for LiDAR point cloud data filtering based on hierarchical pseudo-grid[J]., 2017, 37(8): 0828004. 黄作维, 刘峰, 胡光伟. 基于多尺度虚拟格网的LiDAR点云数据滤波改进方法[J]. 光学学报, 2017, 37(8): 0828004.
[52] Cohen J. A coefficient of agreement for nominal scales[J]., 1960, 20(1): 37–46.
[53] Zhou J X, Mao S S.[M]. 2nd ed. Beijing: China Statistics Press, 2008: 433–440. 周纪芗, 茆诗松. 质量管理统计方法[M]. 2版. 北京: 中国统计出版社, 2008: 433–440.
[54] Geiger A, Lenz P, Stiller C,. Vision meets robotics: the KITTI dataset[J]., 2013, 32(11): 1231–1237.
[55] Liu S D, Hu L, Shi T X,. Comparison of filtering algorithms for rock point cloud data[C]//, 2016: 101–107.
[56] Li J, Mei X, Prokhorov D,. Deep neural network for structural prediction and lane detection in traffic scene[J]., 2017, 28(3): 690–703.
Review of ground filtering algorithms for vehicle LiDAR scans point cloud data
Huang Siyuan1, Liu Limin1*, Dong Jian1, Fu Xiongjun2
1Department of Electronic and Optical Engineering, Shijiazhuang Campus of Army Engineering University, Shijiazhuang, Hebei 050003, China;2School of Information and Electronics, Beijing Institute of Technology, Beijing 100081, China
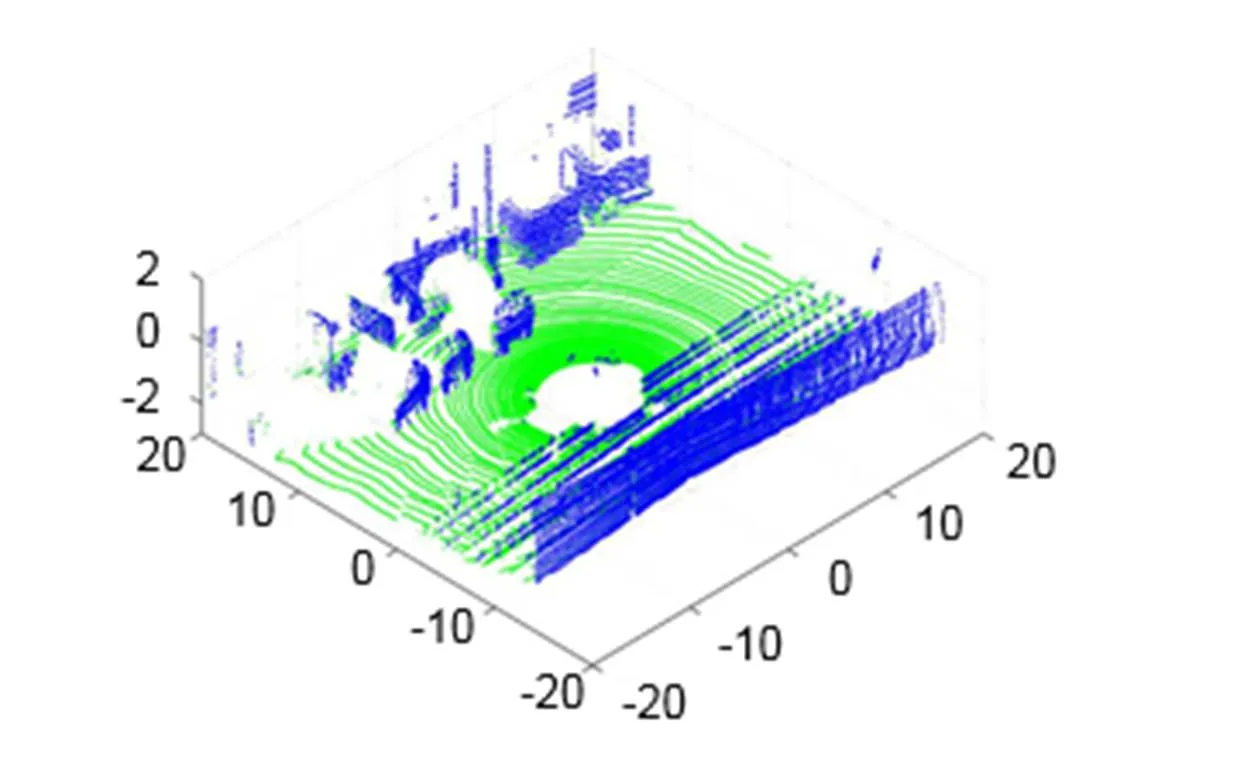
Results of slope-regional growth filtering algorithm
Overview:LiDAR plays an important role in the field of unmanned driving. Ground filtering is the key technology to separate and extract the ground information according to the point cloud data acquired by LiDAR. First of all, this paper briefly describes the landmark events that vehicle LiDAR scans (VLS) established its position in the field of unmanned driving. According to the classification of mechanical, mixed solid and solid LiDAR, the working principle of each type of VLS is described, and the advantages and disadvantages of each type of VLS are discussed and compared. Secondly, the development of VLS ground filtering algorithms is studied. And the existing algorithms are sorted according to the processing methods of point cloud data. The ground filtering algorithm is divided into four categories: the ground filtering algorithm based on space division, the ground filtering algorithm based on scan lines, the ground filtering algorithm based on local characteristics, and the ground filtering algorithm based on additional information. According to the principles and filtering results of different algorithms, their characteristics, advantages and disadvantages are described. In addition to the above filtering algorithms, some ground filtering algorithms are also introduced. However, the adaptability of these algorithms to VLS point cloud data needs to be further improved. The common evaluation methods and standards of ground filtering accuracy are described to effectively evaluate the filtering results of various algorithms in different situations. There are three evaluation methods of filtering results: the manual calibration method, the visual inspection method, and the random sampling method. Furthermore, there are three evaluation standards for filtering accuracy: the cross table method, the Kappa coefficient method, and the algorithm time/space complexity. In order to show the characteristics of various algorithms, typical algorithms are selected for comparison from the ground filtering algorithm based on spatial division, the ground filtering algorithm based on scan lines and the ground filtering algorithm based on local characteristics. By changing the selected value of parameters, several groups of tests are carried out for each algorithm. The filtering results are arranged in ascending order according to Kappa coefficient, and the influence of parameter changes on the results is analyzed. The accuracy evaluation criteria are used to compare and analyze the optimal filtering results. Finally, the shortcomings of existing VLS ground filtering algorithms are summarized, and the development trend of VLS and VLS ground filtering algorithms is prospected. With the development of the computer technology and machine learning technology, filtering algorithms will be more intelligent and efficient.
Citation: Huang S Y, Liu L M, Dong J,. Review of ground filtering algorithms for vehicle LiDAR scans point cloud data[J]., 2020,47(12): 190688
* E-mail: lidarsci@sina.com
Review of ground filtering algorithms for vehicle LiDAR scans point cloud data
Huang Siyuan1, Liu Limin1*, Dong Jian1, Fu Xiongjun2
1Department of Electronic and Optical Engineering, Shijiazhuang Campus of Army Engineering University, Shijiazhuang, Hebei 050003, China;2School of Information and Electronics, Beijing Institute of Technology, Beijing 100081, China
LiDAR plays an important role in the field of unmanned driving. Ground filtering is the key technology to separate and extract the ground information from the point cloud data acquired by LiDAR. Firstly, the development and classification of vehicle LiDAR scans (VLS) are introduced, and the advantages and disadvantages of all kinds of VLS are discussed. Then, the development of VLS ground filtering algorithm is studied and classified. The evaluation methods and standards of ground filtering accuracy are described, and three typical algorithms are compared and analyzed. Finally, the shortcomings of current VLS and its ground filtering algorithms are summarized, and the future development trend is prospected.
LiDAR; ground filtering; intelligent driving; accuracy evaluation; prospect
The 13th Five Year Plan Pre-Research Fund of Equipment Development Department (41415010503)
10.12086/oee.2020.190688
TN249
A
黄思源,刘利民,董健,等. 车载激光雷达点云数据地面滤波算法综述[J]. 光电工程,2020,47(12): 190688
: Huang S Y, Liu L M, Dong J,Review of ground filtering algorithms for vehicle LiDAR scans point cloud data[J]., 2020, 47(12): 190688
2019-11-13;
2020-01-14
装备发展部十三五预研基金(41415010503)
黄思源(1993-),男,博士研究生,主要从事激光雷达目标识别方面的研究。E-mail:635938927@qq.com
刘利民(1971-),男,教授,博士生导师,主要从事目标探测与电子对抗的研究。E-mail:lidarsci@sina.com
