倾转四旋翼飞行器倾转过渡走廊分析方法
2021-01-08俞志明陈仁良孔卫红
俞志明,陈仁良,孔卫红
(南京航空航天大学 航空学院 直升机旋翼动力学国家级重点实验室,南京210016)
倾转四旋翼(QTR)飞行器属于新型复合高速旋翼类飞行器。从外观上看,倾转四旋翼飞行器的设计可以视作是2架倾转旋翼机纵向布置。它有4个可以绕倾转轴转动的旋翼短舱,被安装在前后机翼的尖端。后机翼比前机翼略长和略高,后旋翼在前旋翼的外侧。相较于倾转旋翼机,倾转四旋翼飞行器由于多了2副旋翼和机翼,因此四旋翼倾转飞行器在速度和载重上有较大优势。
在一个完整的飞行任务剖面内,倾转模式是直升机模式和固定翼模式相互转换的过程。该阶段飞行器的重力和阻力需要各气动部件的气动力合理分配来克服。但小速度飞行时可能导致机翼所需迎角过大而造成机翼失速,大速度前飞时将可能造成旋翼后行桨叶失速、前行桨叶压缩性以及单旋翼可用功率超过发动机额定输出功率,旋翼和机翼动力稳定性还可能限制前飞速度[1]。在如此多的限制条件下,决定了倾转四旋翼飞行器只能在一定的速度区间内进行直升机模式和固定翼飞机相互转换。这个速度区间由所有可行的倾转路径组成,即倾转过渡走廊。
准确确定倾转过渡走廊重要性体现在2方面。首先,倾转过渡走廊的宽窄是评价倾转旋翼类飞行器倾转难易程度和安全性的关键因素和指标,对于总体设计和气动布局具有重要参考价值。其次,倾转过渡走廊对于飞行控制系统的设计,也具有重要参考意义,如倾转过渡起始速度点、过渡路径、倾转终止速度点的选择等。因此,确定倾转走廊是设计倾转四旋翼飞行器的关键技术之一。文献[2]认为XV-15机翼失速迎角限制了倾转走廊的低速边界,桨叶弯矩限制了其高速边界。文献[3]中认为低速边界限制因素为机翼载荷,高速边界限制条件为桨叶载荷。文献[4]认为低速边界为机翼失速限制边界,高速边界为桨叶载荷限制,包括桨叶失速和压缩效应。文献[5-6]针对倾转旋翼-机翼飞行器的倾转过渡走廊展开了研究,认为低速边界为机翼失速限制边界,高速边界由功率限制。文献[1,7]采用质点模型,从低速段包线和高速段包线2方面对倾转旋翼机的倾转过渡走廊展开研究,以机翼失速限制确定低速段倾转过渡走廊边界,以旋翼可用功率限制确定高速段倾转过渡走廊边界。但是由于倾转旋翼机和倾转旋翼-机翼飞行器的重心比较靠近旋翼短舱倾转轴,旋翼和机翼气动力对重心产生的俯仰力矩较小,因此倾转旋翼飞行器只需考虑旋翼和机翼之间气动力分配问题。但是倾转四旋翼飞行器重心位于两机翼之间,各气动部件对重心产生的俯仰力矩更大,从而涉及到前后旋翼、前后机翼气动力分配问题,导致倾转四旋翼飞行器的倾转走廊计算更加复杂。总之,基于质点模型的倾转过渡走廊计算方法适合倾转双旋翼飞行器和倾转旋翼-机翼飞行器,但不完全适合倾转四旋翼飞行器。文献[8]给出倾转四旋翼飞行器的倾转走廊,但没包括分析方法。国内外鲜有关于倾转四旋翼飞行器倾转走廊研究的报道。到目前为止,还没有具体的理论计算方法用来计算倾转四旋翼飞行器倾转走廊。
鉴于此,本文提出一种确定倾转四旋翼飞行器倾转过渡走廊的综合方法。该方法从2方面开展研究,以机翼升力特性限制低速和高速边界,以单旋翼可用功率限制高速边界。
1 倾转过渡走廊求解模型
倾转四旋翼飞行器定常飞行时,作用在它上面的合力和合力矩必须为零。当飞行器有一定的前飞速度,就必须克服一定的阻力;为保持高度,垂直方向的力也必须始终保持平衡。此外,由于各个部件气动力作用点不同,对重心会产生很大的力矩。图1给出了作用在飞行器纵向对称面内的外力。图中:T1、T2、T3和T4分别为左前、右前、左后和右后旋翼的拉力;L1、L2、L3和L4分别为左前、右前、左后和右后机翼的升力;D1、D2、D3和D4分别为左前、右前、左后和右后机翼的阻力;LF为机身升力;DF为机身阻力;MF为机身俯仰力矩;G为飞行器重力;αf为机身迎角;V为前飞速度;Q1、Q2、Q3和Q4分别为左前、右前、左后和右后旋翼的反扭矩。
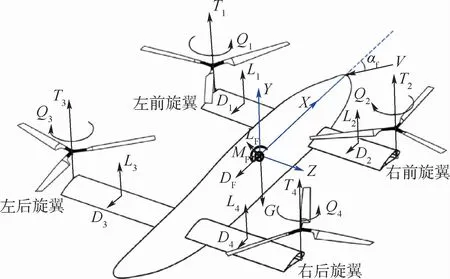
图1 作用在倾转四旋翼飞行器上的外力Fig.1 Forces acting on quad tilt rotor aircraft
根据图1可得如下纵向平面内的力和力矩的平衡关系:
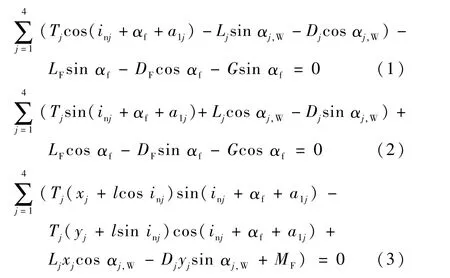
式中:j=1,2,3,4为旋翼机翼编号;xj和yj分别为对应编号的气动部件相对重心的纵向和垂向坐标;l为桨毂到倾转轴的距离;inj为对应编号的短舱倾转角,直升机模式时为90°,固定翼飞机模式时为0°;αj,W为对应编号的机翼迎角;a1j为对应编号旋翼后倒角。
四旋翼倾转飞行器有4个旋翼,为了考虑旋翼间的气动干扰,前后旋翼之间的干扰可以参考纵列式直升机,引入前后旋翼的干扰因子[9-10]。
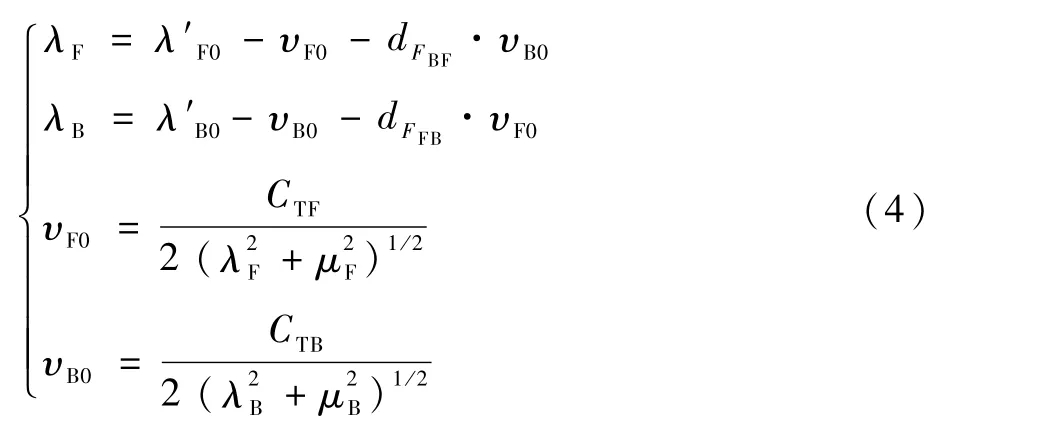
式中:λF、λB分别为修正后的前、后旋翼入流比;λ′F0、λ′B0分别为前、后旋翼自由来流入流比;υF0、υB0分别为前、后旋翼平均诱导速度;CTF、CTB分别为前、后旋翼的拉力系数;μF、μB分别为前、后旋翼前进比;dFBF和dFFB分别为后旋翼对前旋翼和前旋翼对后旋翼的干扰因子,可由经验公式、实验以及CFD计算得到。
左右旋翼之间存在并列效应[11-12],借鉴XV-15倾转旋翼飞行器GTRS模型处理方式,左右旋翼诱导速度相互干扰修正量估算公式为
式中:XSS为左右旋翼并列效应系数,其大小由旋翼旋转方向、两旋翼之间的距离、前进比和旋翼迎角决定,具体数值应结合实验测得;CT为旋翼拉力系数;κ=1-ctip/(2R)为桨尖损失系数,ctip为桨尖弦长,R为旋翼半径;μ=Ut/(ΩR)为旋翼前进比,Ut为平行于桨盘平面的速度,Ω为旋翼转速。
旋翼气动力采用动量叶素理论、均匀入流模型以及准定常一阶挥舞运动得到。
倾转四旋翼飞行器在悬停和低速飞行时,由于旋翼在机翼上方,旋翼下洗气流能改变机翼迎角以及相对来流速度,因此旋翼尾流对机翼气动力 影 响 很 大[1,7,13-14]。旋 翼 对 机 翼 气 动 力 影 响 大小由多因素决定[1,15]。为了准确建立计算模型,必须考虑旋翼对机翼的气动干扰。文献[1,7,16-20]把机翼面积分为2部分:一部分是受旋翼尾流影响的滑流区机翼面积SWss,另一部分是不受旋翼尾流作用的自由流区机翼面积SWfs。
机翼处于滑流部分的面积SWss和处于自由流部分的面积SWfs的计算公式分别为
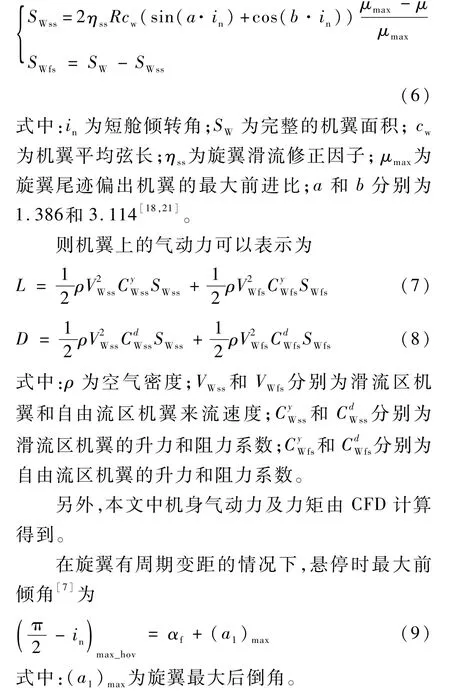
2 限制条件
2.1 机翼升力特性限制
倾转四旋翼飞行器在低速飞行时短舱进行倾转,机翼可能失速,当高速飞行时进行倾转,飞行器需低头来增加旋翼气动力水平分量来平衡飞行过程中产生的阻力。当飞行器低头过大,机翼迎角可能低于零升力迎角,机翼产生负升力,此时,机翼成为一个负载,导致旋翼需用拉力陡增,此时飞行状态非常危险,前飞过程应该避开此状态。综上所述,倾转四旋翼飞行器飞行时应保证机翼迎角在安全区域内。机翼失速和机翼迎角低于零升力迎角分别对应机翼升力特性限制的上下限,而机翼迎角又与机体迎角αf直接相关,可通过式(10)最终确定安全机体迎角范围,此范围与倾转四旋翼飞行器操纵方式无关。

式 中:αj,W_stall为 对 应 编 号 的 机 翼 失 速 迎 角,min(αj,W_stall)为取4者最小值;αj,W0为对应编号的机翼零升力迎角,max(αj,W0)为取4者最大值;ij,W为对应编号的机翼初始安装角。
2.2 旋翼功率限制
与倾转旋翼飞行器相比,倾转四旋翼飞行器重心位于两机翼之间,旋翼机翼气动力对重心的俯仰力矩更大,从而涉及到前后旋翼、前后机翼气动力分配问题,导致前后旋翼的需用功率不等。单旋翼可用功率限制边界可以表示为
max(Prj)≤Pe(11)式中:Prj为对应编号的旋翼需用功率;Pe为单个发动机输出的额定功率。
单个旋翼需用功率Pr可表示为
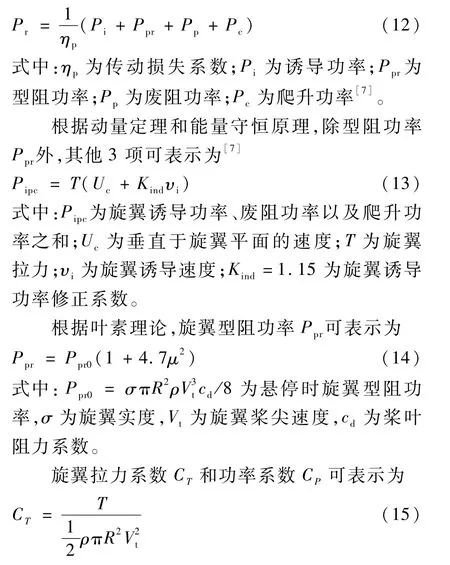

3 算例分析
运用上述方法对算例倾转四旋翼飞行器开展倾转过渡走廊计算。算例飞行器主要参数如表1所示,算例飞行器旋翼没有周期变距,倾转方式为四副旋翼同步倾转。
3.1 计算流程
图2给出了倾转四旋翼飞行器倾转过渡走廊的计算流程。机翼升力特性限制边界计算流程是:首先给定原始参数及计算初值,其次以机体迎角特定值为优化目标,分别计算机体迎角-9°~10°范围内的不同倾转路径。功率限制边界计算流程是:设定倾转角和飞行速度进行配平计算,算出4副旋翼需用功率,然后根据单个旋翼可用功率限制条件,得到算例样机单个旋翼可用功率限制边界。
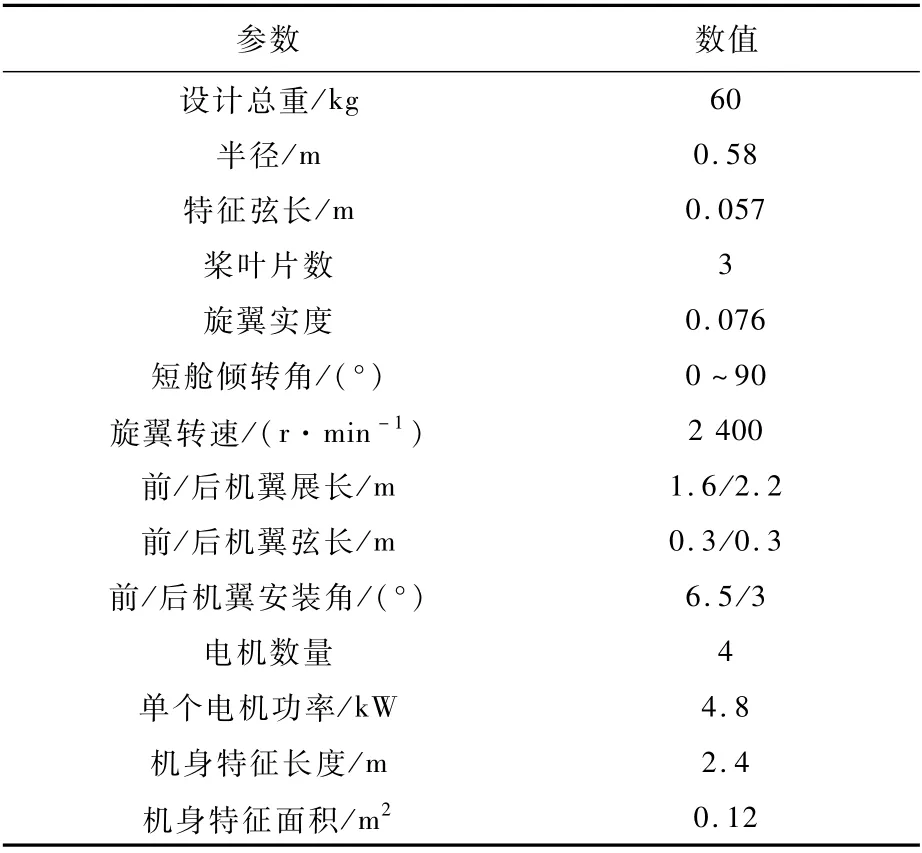
表1 算例倾转四旋翼飞行器主要参数Table 1 Main parameters of example quad tilt rotor air craft
3.2 结果与分析
图3给出了所建旋翼模型在悬停下的计算值和试验值对比,可以看出旋翼模型精确度满足要求。
图4给出了安全机体迎角内,等机体迎角下短舱倾转角随速度的变化。可以看出,相同倾转角下,机体从正迎角向负迎角过渡时,飞行器所需的速度越来越大,这是由于机翼迎角在减小,提供相同的升力所需的飞行速度越大。
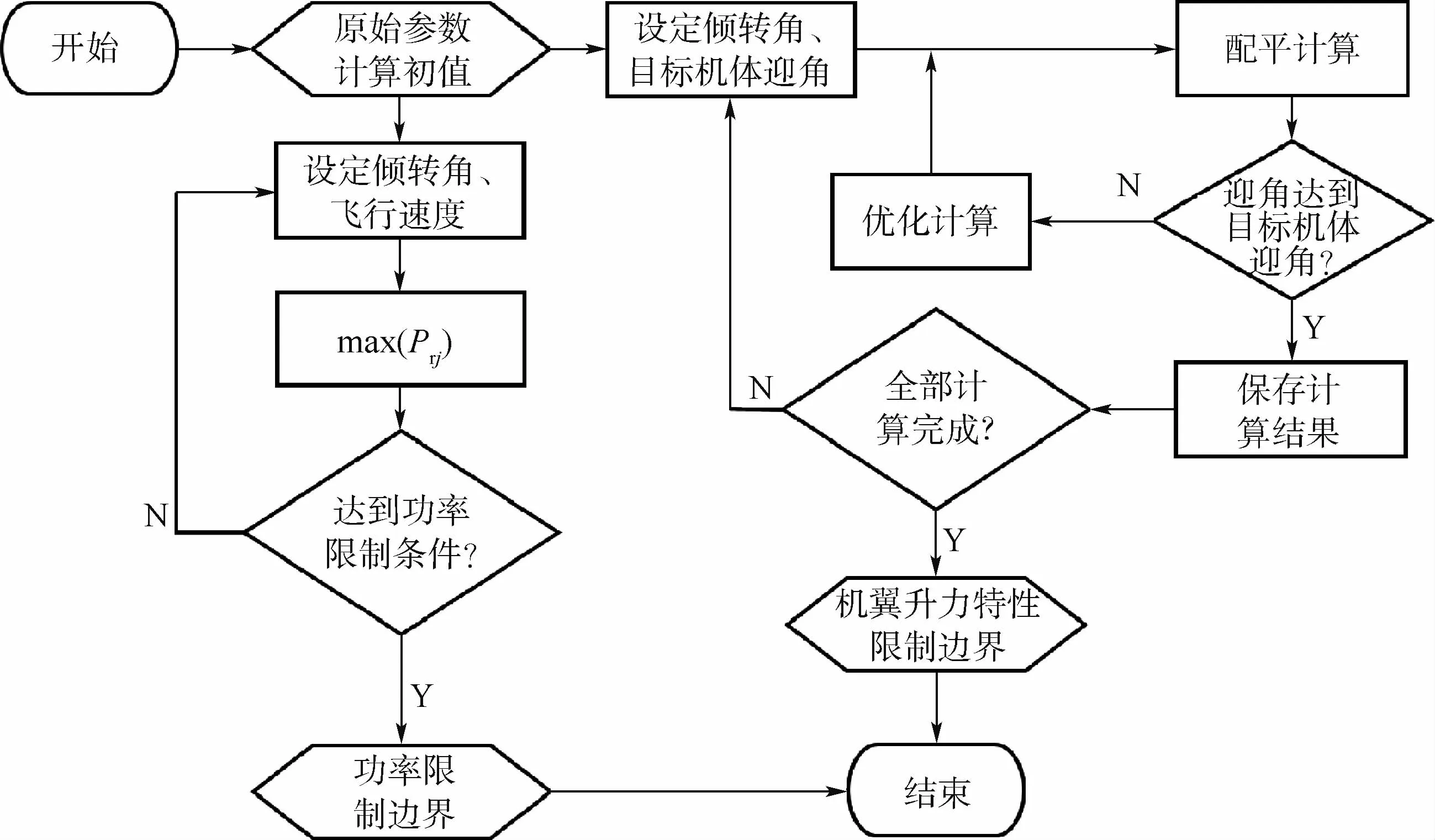
图2 倾转过渡走廊计算流程Fig.2 Flowchart for computing conversion corridor
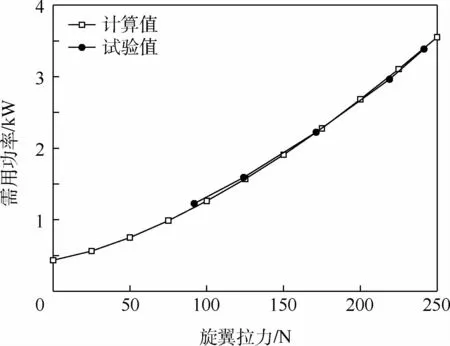
图3 旋翼模型验证Fig.3 Rotor model verification

图4 等机体迎角倾转时短舱倾转角与前飞速度的关系Fig.4 Relation between tilt angle of nacelle and forward speed at constant angle of attack of fuselage
图5~图7分别给出了机体迎角为-6°、0°和10°下各气动部件的气动力随速度的变化。飞行速度为0 m/s时,机翼产生负垂向力是由于旋翼对机翼产生气动干扰。在倾转过程中,旋翼气动力水平分量在不断增加而垂向分量在不断减小最后到0,而机翼垂向力在不断增加。机体迎角为-6°时,图中最大速度对应的倾转角为35°,可以看出后旋翼气动力垂向分量比前旋翼气动力垂向分量大,前机翼垂向力比后机翼垂向力大,这是由于机身产生了一个较大低头力矩。机体迎角为0°时,前后旋翼气动力垂向分量基本保持一致,前机翼的垂向力比后机翼垂向力略小。这是由于在前飞时,机体产生了一个较小的抬头力矩。机体迎角为8°时,前旋翼气动力垂向分量比后旋翼气动力垂向分量小,后机翼垂向力比前机翼垂向力大,这是由于机体产生了一个较大的抬头力矩。对比图5~图7中各气动部件垂向力可以发现,前旋翼提供的垂向力占比随机体迎角增大而增大;后旋翼提供的垂向力占比随机体迎角增大而减小;前机翼提供的垂向力占比随机体迎角增大而减小;后机翼提供的垂向力占比随机体迎角增大而增大。
图8和图9分别给出了不同倾转角,前、后旋翼需用功率随飞行速度的变化曲线。可以看出,前飞状态下需用功率随着前飞速度增加先减小后增大,呈“马鞍形”,这是由于随着倾转角的减小,前飞速度在逐渐增加,导致废阻功率的增加。对比图8和图9可以发现,前后旋翼的需用功率不一致,这是由于飞行速度较大时,机身有较大的负迎角,导致后旋翼气动力比前旋翼大,从而导致后旋翼需用功率比前旋翼需用功率大,并且在同一机体迎角下后旋翼需用功率先达到限制边界。
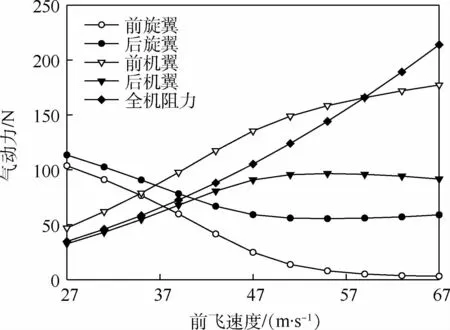
图5 机体迎角为-6°时各气动部件垂向气动力随前飞速度的变化Fig.5 Variation of vertical aerodynamic force of each pneumatic component with flight speed at-6°angle of attack of fuselage

图6 机体迎角为0°时各气动部件垂向气动力随前飞速度的变化Fig.6 Variation of vertical aerodynamic force of each pneumatic component with flight speed at 0°angle of attack of fuselage
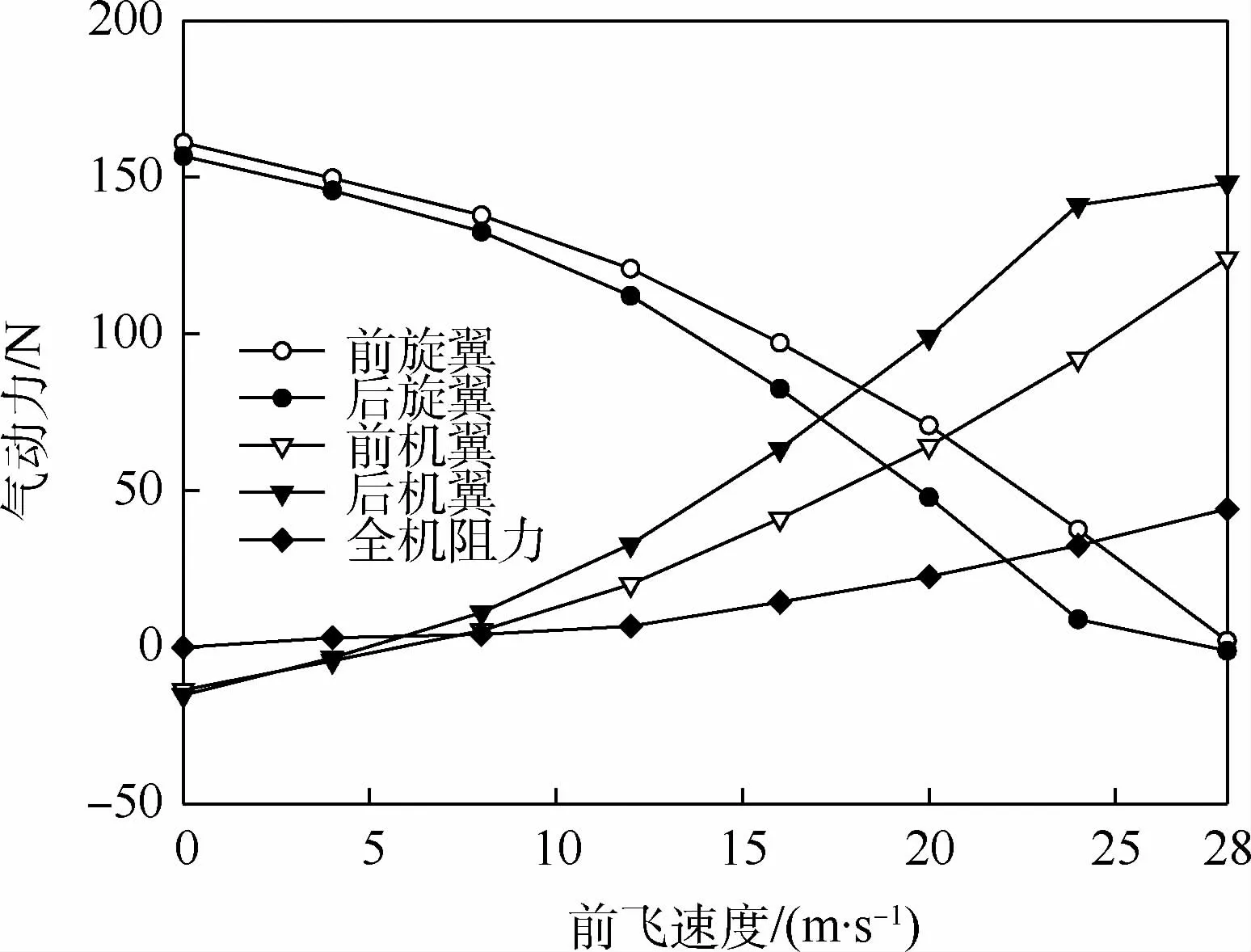
图7 机体迎角为10°时各气动部件垂向气动力随前飞速度的变化Fig.7 Variation of vertical aerodynamic force of each pneumatic component with flight speed at 10°angle of attack of fuselage
图10给出各限制条件下的倾转四旋翼飞行器的倾转包线,可以看出,短舱倾转角为0°时,最小和最大前飞速度分别为28 m/s和68 m/s。短舱为90°时,最大前飞速度为39 m/s,此时机身迎角为-9°。同时,倾转四旋翼飞行器倾转过渡走廊的高速边界由机翼升力特性高速边界和单旋翼功率限制边界共同组成。就倾转四旋翼飞行器而言,单旋翼功率限制边界一定比总功率限制边界更严格。

图8 等短舱倾转角时前旋翼需用功率随前飞速度变化Fig.8 Variation of required power of front rotor with flight speed at constant tilt angle of nacelle
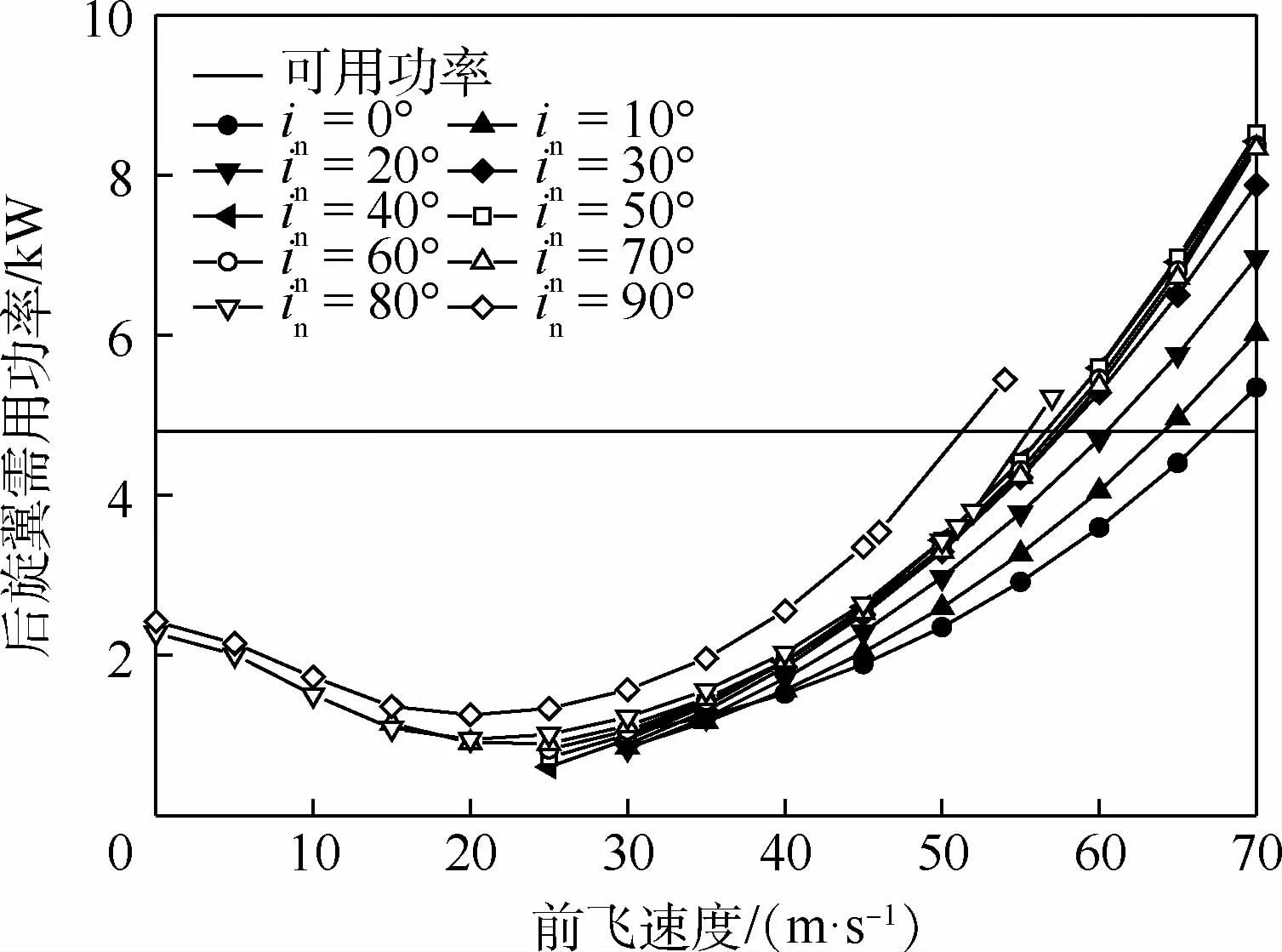
图9 等短舱倾转角时后旋翼需用功率随前飞速度变化Fig.9 Variation of required power of rear rotor with flight speed at constant tilt angle of nacelle
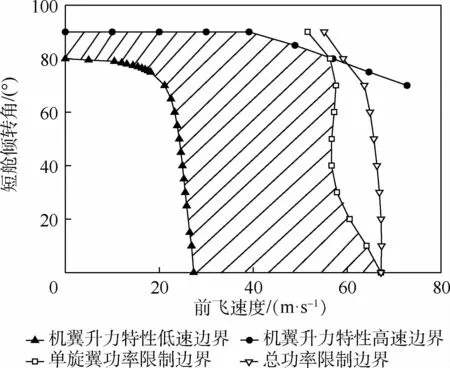
图10 算例飞行器的倾转过渡走廊Fig.10 Conversion corridor of example aircraft
4 结 论
1)倾转四旋翼飞行器可以以不同的机体迎角进行倾转,但为了充分发挥前后旋翼的性能应尽可能保证前后旋翼需用功率一致,倾转四旋翼飞行器在小机体迎角下倾转优于在大机体迎角下倾转。
2)前旋翼提供的拉力占比随机体迎角增大而增大;后旋翼提供的拉力占比随机体迎角增大而减小;前机翼提供的拉力占比随机体迎角增大而减小;后机翼提供的拉力占比随机体迎角增大而增大。
3)倾转四旋翼飞行器倾转过渡走廊的高速边界由机翼升力特性高速边界和单旋翼功率限制边界共同组成,单旋翼功率限制边界比总功率限制边界更严格。
4)本文方法通用于有周期变距和异步倾转的倾转四旋翼飞行器。
