基于机器视觉的小麦种子活力检测方法
2021-01-07吴旭东张晗罗斌康凯侯起岭董宏图
吴旭东 张晗 罗斌 康凯 侯起岭 董宏图
摘要:种子发芽试验是种子检测的重要环节。传统的发芽检测采用人工检测方式,存在费时费力、且受人为主观因素影响较大等问题。以小麦种子为研究对象,设计一种小麦种子垂直发芽装置,基于形态学分析设计了种子发芽点检测方法,借助芽点位置对胚根、胚芽长度进行检测,实现种子发芽快速判别。通过7 d的发芽试验计算小麦种子的发芽率、发芽指数、平均发芽指数,与人工检测结果进行对比,该方法测定的小麦种子发芽率的准确率达100%,发芽指数、平均发芽指数误差分别为1.68%、2.40%。该装置和方法实现了种子活力参数的检测分析,为农作物种子快速检测提供了研究基础。
关键词:种子活力检测;发芽率;机器视觉;小麦;种子发芽试验;发芽指数
中图分类号:S512.101;S126 文献标志码: A
文章编号:1002-1302(2021)24-0189-06
收稿日期:2021-07-27
基金项目:国家重点研发计划(编号:2017YFD0701205);北京市农林科学院青年基金(编号:QNJJ202104);北京市农林科学院科研创新平台建设项目(编号:PT2021-04)。
作者简介:吴旭东(1995—),男,山西运城人,硕士研究生,主要从事机器视觉技术研究。E-mail:731799493@qq.com。
通信作者:董宏图,硕士,农艺师,主要从事种子表型及生理检测研究。E-mail:donght@nercita.org.cn
种子质量的好坏主要由种子活力来体现。种子活力是指种子在各种环境条件下具有发芽与出苗的能力,以及幼苗形状、贮藏性能和种子的抗逆性等特征的综合表现,较标准发芽率更能说明种子质量的优劣[1-2]。因此种子活力指数检测一直以来都是研究的热点。传统的种子活力检测方法通常分为直接法和间接法。直接法是在实验室内通过测定出种子的发芽率或者苗长等指标,如砖砾法、低温处理抗冷测定法等;间接法是使用实验室内的仪器,测定与种子活力相关的物理特征和生理生化特征,如人工加速老化法、电导率测定法、四唑染色法等[3-4]。传统种子活力检测方法对种子活力情况的评定结果科学性强,是国家标准种子活力检测方法,但也存在对实验工作人员的专业能力要求较高、主观性强等缺点,不能满足现代农业生产对种子活力快速、准确检测的新要求。
图像处理技术作为一种无损检测技术,研究人员将图像处理技术应用于高通量作物表型,实现了作物生理生态信息的自主监测、分析和应用[5-8]。Howarth等利用图像处理技术测量生菜和高粱种子发芽时期幼苗的生长速率[9]。Deng等基于图像处理技术开发了幼苗长度计算软件,并根据计算结果来评估林木种子的活力[10]。李振基于图像处理技术,开发了辣椒种子活力指数检测系统,活力指数检测准确率达92%以上[11]。王纪章等利用 Kinect相机对黄瓜穴盘苗的发芽率、株高、叶面积等参数进行了无损监测,其中发芽率误差不大于1.57%[12]。金沙沙等提出了一种基于端点删除的剪枝方法,实现了对小麦、水稻的芽长和根长的测量[13]。总之,目前国内外利用图像处理技术检测种子发芽率的方法研究较少,还未有完善的针对种子萌芽阶段的发芽率检测方法,但图像处理技术为自动化检测发芽率提供了研究思路,在技术上有很强的参考价值。
本研究通过设计适用于机器视觉技术检测种子萌发过程的发芽装置,用工业相机采集小麦种子发芽的RGB图像,基于种子的几何特征,运用形态学处理方法寻找种子芽点,基于芽点位置,进行种子胚根和胚芽的长度检测,实现种子发芽判别,通过连续7 d的检测分析,实现种子活力检测,并与人工测定的种子活力进行对比,从而验证本研究算法的准确率。
1 图像采集系统
1.1 发芽装置设计
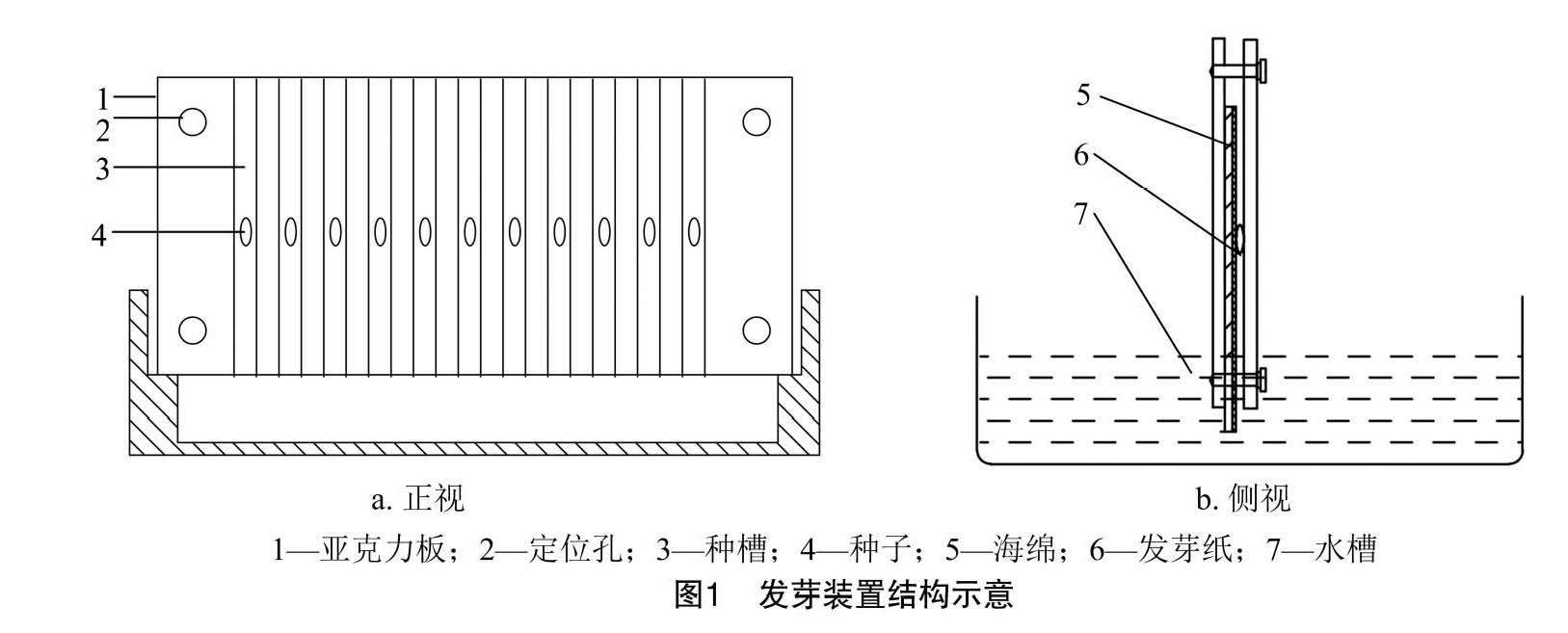
本研究设计了一种适用于图像技术检测种子活力的发芽装置,装置结构示意见图1。该装置包括水槽、透明亚克力板、发芽纸、黑绒布、海绵、定位孔、种槽等。在亚克力板上设有种槽的目的在于限制种子发芽的生长空间,不仅可以实现种子在发芽平面内生长,同时也可避免不同种子之间根系的相互缠绕。发芽纸需要延伸到水槽底部,由于毛细现象,水沿着发芽纸上升到种子部位,为种子萌发提供水分。在发芽纸上方铺1层黑绒布作为背景是为了使图像的背景单一,减少噪声因素,便于种子与背景的分割。为了给种子的萌发提供充足的水分,在发芽纸下面垫一层海绵来储存水分,同时海绵也可以缓冲2个板之间的夹紧力,避免挤压种子造成破坏。亚克力板上的四周设有定位孔,是为了便于对不同时期的图像进行种子的同位分割操作。
1.2 图像采集平台搭建
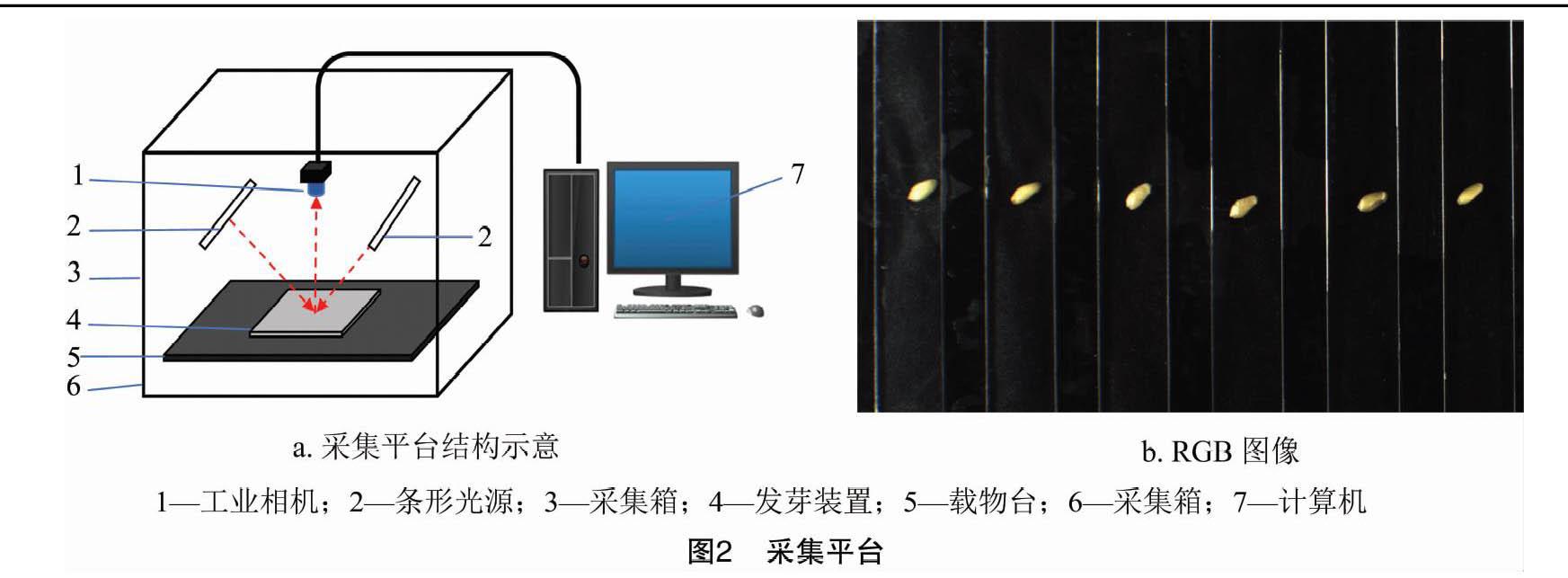
图像采集平台见图2-a,采集环境主要由采集箱、工业相机、光源、发芽装置和计算机组成。采集箱尺寸为50 cm×40 cm×50 cm;相机型号为大恒MER-500-79UC,图像保存为BMP格式,分辨率为2 592像素×1 944像素,配备computar 8 mm镜头,相机平面至发芽装置表面高度为28 cm;在采集过程中,为了获取小麦种子的高品质图像,在采集箱内部2侧各设有1个倾斜的条形补光灯,用以提供均匀稳定的光源[14]。在载物台上四周设定4个定位点,用于发芽装置在载物台上的定位。为了获得完整的胚芽和胚根区域,通过对不同的种子姿态进行发芽试验,种子侧放更加便于图像分割处理,获取的图像见图2-b。
2 结果与分析
2.1 圖像处理
2.1.1 获取ROI区域 为了减少计算量,提高分割精度和效率,在处理图像时选择待检测目标周围的局部区域,即感兴趣区域(region of interest,ROI)[15]。由于种子是在浸润环境下进行发芽,黑绒布上的水分分布不均导致整个背景的颜色、亮度不均匀,同时非目标区域的部分噪声灰度值与目标的灰度值出现了重叠,增加了对目标分割提取的难度。为了尽可能减少这些因素对图像分割的干扰,本研究在采集到原始图像后,利用种槽位置划分ROI区域进行分块处理。根据发芽装置中的10个种槽宽度将原始RGB图像分为10个ROI区域,每个区域对应1粒种子。
2.1.2 预处理 为了提升背景与目标的对比度,使目标区域的特征更为明显,利用线性灰度变换处理对分块后的RGB图像进行对比度增强,灰度变换一般不改变像素点的坐标信息,只改变像素点的灰度值[16]。
2.1.3 阈值分割 圖像的颜色信息,特别是通道信息,有助于从空间域上对图像进行分割操作。将增强后的图像分成3个单通道图像,经过对比3个通道的图像,发现选取R通道时,种子和幼苗的形状特征可以在灰度图中得到很好的反映,种子和幼苗区域与背景也可以很明显区分开,因此选用R通道图像继续处理。
利用灰度阈值变换的方法[17-18]在种子的R通道图像中将种子分割出来。灰度阈值变换可以让一幅图像变成黑白二值化图,能够实现背景和与前景目标的分离,其表达式为
y=0 , x<T
255, x≥T。(1)
其中,T为阈值,像素的灰度值大于阈值的为种子颜色,变换后该点灰度值为255;小于阈值的为背景,变换后该点的灰度值为0。基于采集的图像有稳定的光源照明,采集环境稳定,选择固定阈值进行图像分割,阈值设为31。
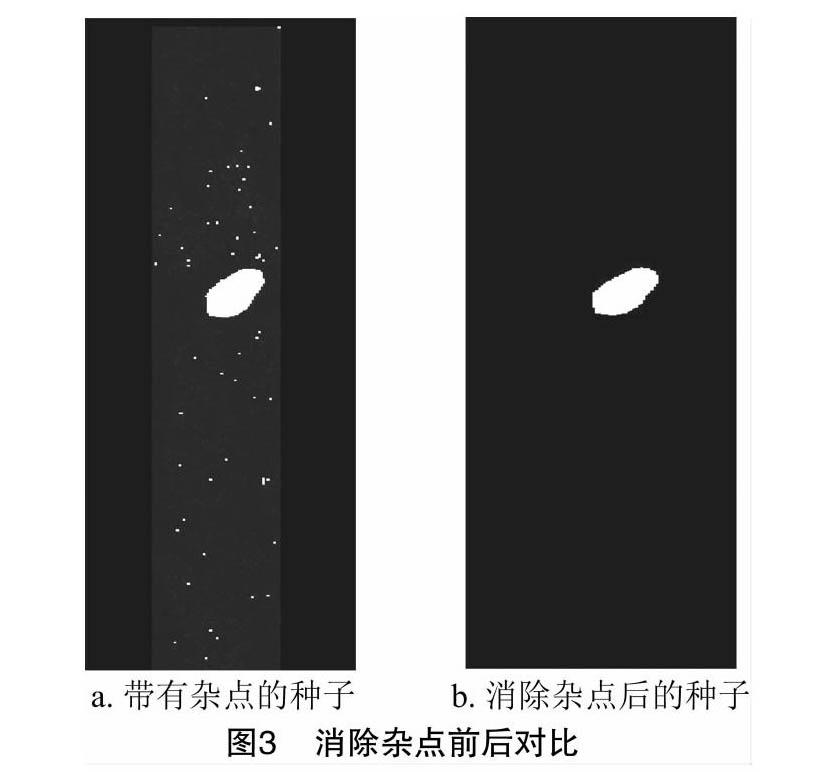
2.1.4 消除杂点 阈值分割以后得到的区域集合中会有杂点,见图3-a,通过观察前景目标与杂点最大的特征区别是面积特征,因此通过面积特征对区域集合进行筛选,消除图像中的杂点。种子面积的像素点个数一般大于500,因此,在筛选时将面积特征的最小值设为500。经过面积特征的筛选,可以得到完整的种子图像,消除杂点后的效果见图3-b。
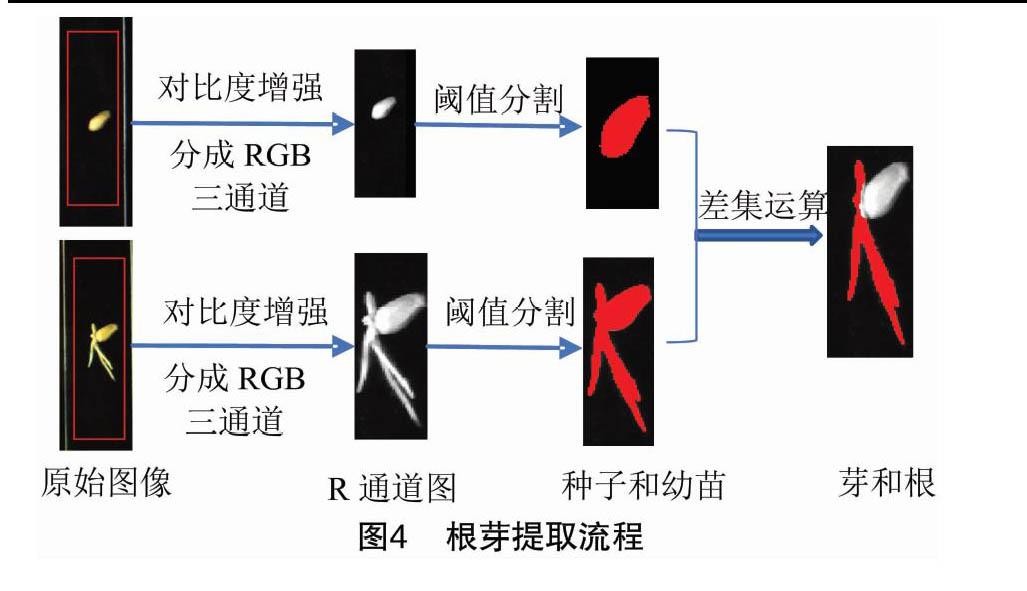
2.1.5 根芽提取 在种子的初始图像上分割获得种子的区域以后,利用同样的方法在1~7 d后的发芽图像中提取出整个幼苗的区域。然后对这2个区域进行差运算,分割提取种子胚芽和胚根部分,差运算的结果见图4,红色区域为所提取的目标区域。
2.2 种子活力测定方法
国标GB/T 3543.4—1995中规定当小麦种子胚根与种子的长度相同,胚芽长为种子长度的50%时,则判定为种子发芽[19]。本研究基于种子的几何特征寻找种子的芽点,以芽点为圆心,分别作胚根与胚芽的判定圆,通过判定圆与种子根芽的相交检测,实现发芽判别。
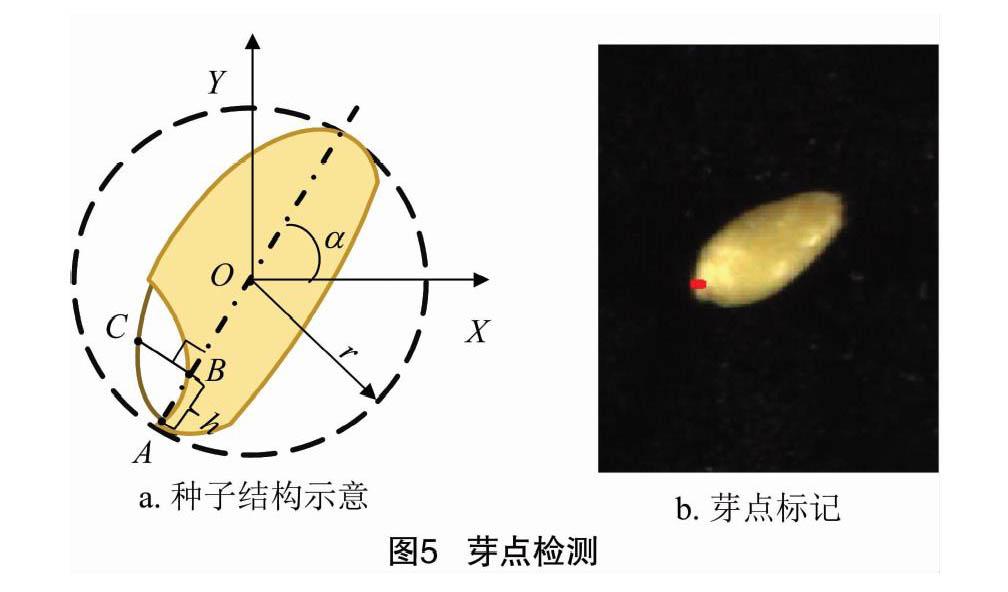
2.2.1 芽点检测 通过预处理和阈值分割获得种子的区域后,利用种子的几何特征寻找出每粒种子的芽点(胚根、胚芽突破种皮的位置点)。小麦种子是椭圆形,首先采用等效椭圆求角度的方法来计算种子区域与水平方向的正向夹角,用等效椭圆来表示种子区域的方向和范围。然后通过二阶中心矩计算出椭圆的长半轴、短半轴和相对于水平正方向的夹角α[16]。作种子区域的最小外接圆,通过最小外接圆来求出种子的中心点坐标及长度。如图5-a所示,O点为种子的中心,种子的长度为2r。通过种子的中心坐标分别加上X、Y方向的偏移量计算出种子的胚尖点A点,其中X方向的偏移量为r×cosα,Y方向的偏移量为r×sinα,具体表达式如下:
Bx=Ox+(1-g)×r×cosα;(2)
By=Oy-(1-g)×r×sinα。(3)
式中:g=h/r,g是修正系数。引入g是用来确定B点坐标。当g=0时,计算出来的是A点坐标。通过大量试验结果表明g取0.2时,找到种子的芽点效果较好。
将已知参数代入公式(2)、公式(3)可以得到点B(Bx,By)后。在HALCON软件中,以B点为垂足,作一条垂直于线段AB的垂线LBC后,在原始种子图像中提取出种子的轮廓,与线段LBC取交集,交集的结果为C点,将其定义为出芽点。种子的芽点标记效果见图5-b,红色点即所要寻找的芽点。
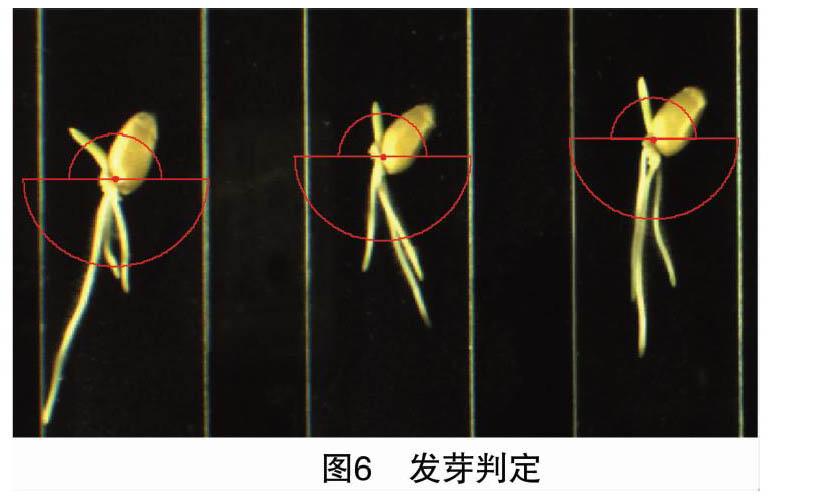
2.2.2 发芽判别 以芽点为圆心,分别作胚芽识别圆和胚根识别圆来检测种子是否发芽。以点C为圆心,分别以r和2r为半径作胚芽判定圆弧和胚根判定圆弧,其中r为种子长度的50%。因此,当种子的胚芽、胚根长度达到发芽标准时,会与2个判别圆弧分别产生交集。发芽标准判定圆在图像检测中的效果见图6。以种子的中心行坐标为分界线,将图像分为上下两部分,利用芽和根的区域位置特征(行坐标)来区分胚芽和胚根的区域,即上面为胚芽,下面为胚根。将提取到的胚芽、胚根区域分别与胚芽圆、胚根圆作差运算,若结果均不为空,则代表胚芽、胚根长度已经达到种子发芽的标准长度,判定该种子已发芽。
一般情况下,差运算之后芽的区域个数为1,根的区域个数大于零,定义为该种子已发芽。未发芽的种子可以分为有根无芽、有芽无根和无根无芽3种情况,通过分别监视芽和根集合区域个数的变量,实现对种子发芽情况的分类并自动记录发芽天数。
2.2.3 活力参数测定 根据上文测量的发芽结果,统计发芽势,即初次发芽率(第3天初次统计发芽率);并计算发芽指数、平均发芽指数[20]。
GI=∑GtDt;(4)
MLIT=∑(Gt×Dt)G。(5)
式中:GI为发芽指数,Dt为发芽日数;Gt为与Dt相对应的每天发芽种子数;MLIT为平均发芽日数;G为发芽率。
2.3 算法流程设计
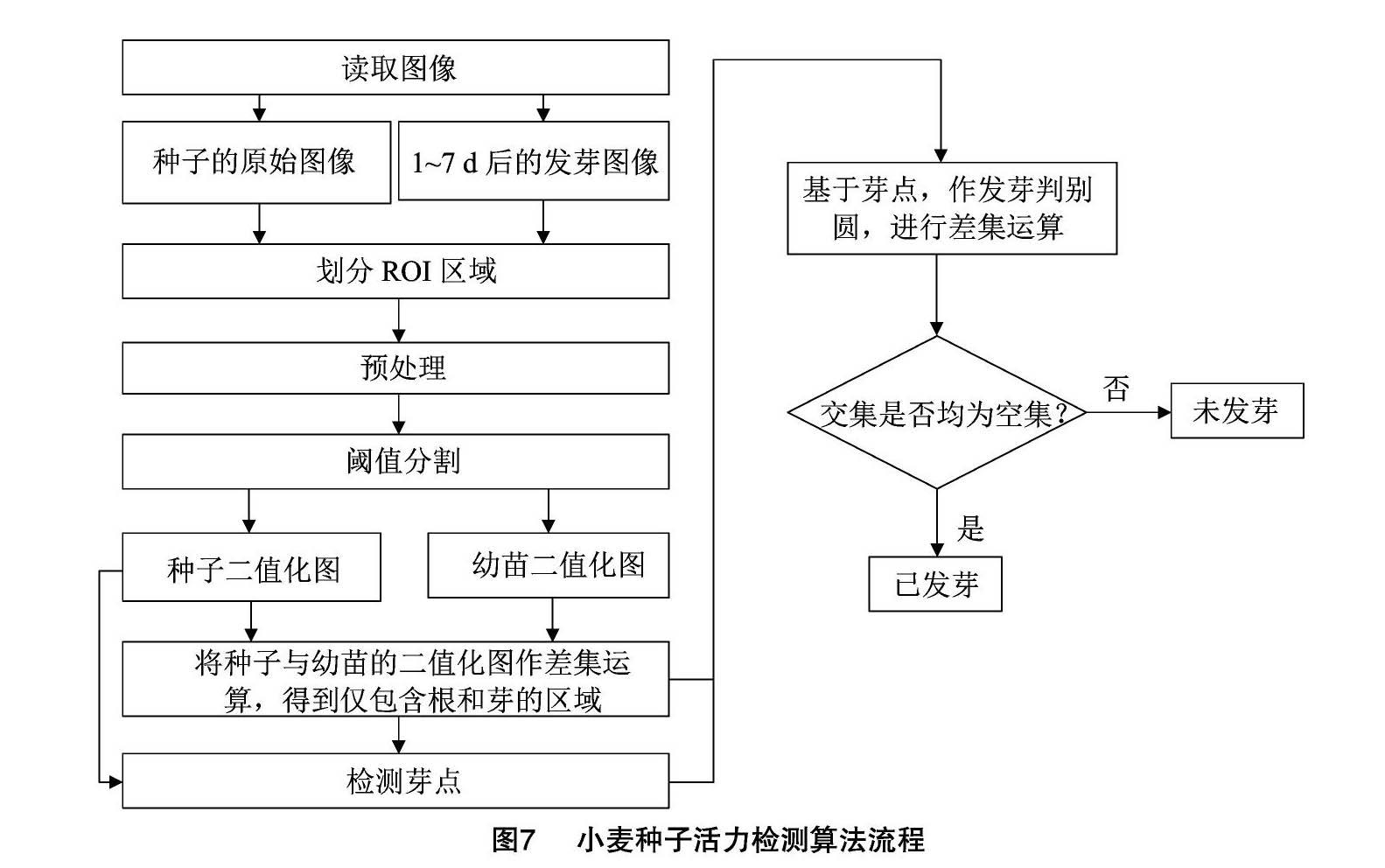
本研究基于HALCON开发平台设计小麦种子活力检测算法,通过导入0~7 d种子发芽图像进行检测分析,获取种子活力相关参数。种子发芽的检测过程包括划分ROI区域、图像预处理、种子的分割、确定种子的芽点、作发芽判定圆、根芽区域的提取,具体检测流程见图7。本研究首先对原始种子的图像进行ROI分块处理,以减少非目标区域的噪声对种子分割的影响。然后对ROI区域进行预处理,提升目标与背景的对比度,便于获得完整的种子和种苗二值化图。通过0 d初始图像分析种子的几何特征来检测芽点。将1~7 d后种苗的二值化图与种子的二值化图进行差运算,得到仅包含根和芽的区域,借助种子的芽点作发芽判别圆,来实现对种子发芽的检测。
3 试验验证
3.1 试验
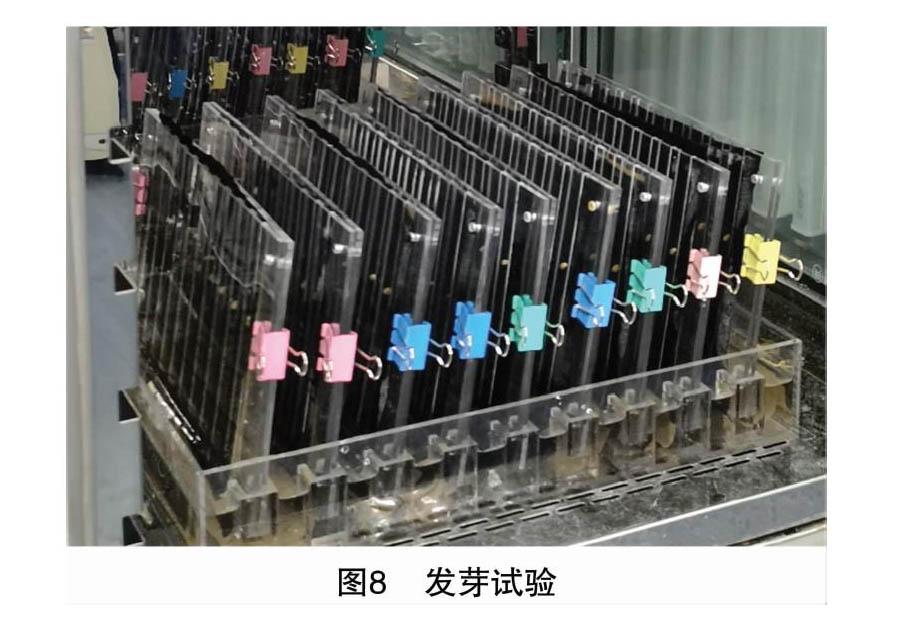
2021年6月,在北京农业智能装备技术研究中心农业农村部农业信息技术重点实验室进行种子发芽试验,试验种子品种为西农529,随机选取100粒种子作为试验的样本。将种子放入浓度为1%的次氯酸钠溶液中消毒10 min,然后使用蒸馏水冲洗3次。将消过毒的种子分为10组,每组10粒。将种子按照侧放的姿态,固定到發芽装置中,最后将发芽装置插入培养箱内的水槽中进行发芽试验,发芽试验实物见图8,人工气候室的环境条件设置为白天 8 h,温度25 ℃;黑夜16 h,温度23 ℃。将1 d记为种子的一个生长周期,因此将种子放入发芽装置后,每天在固定的时间点进行图像采集,连续采集 7 d。
3.2 验证结果
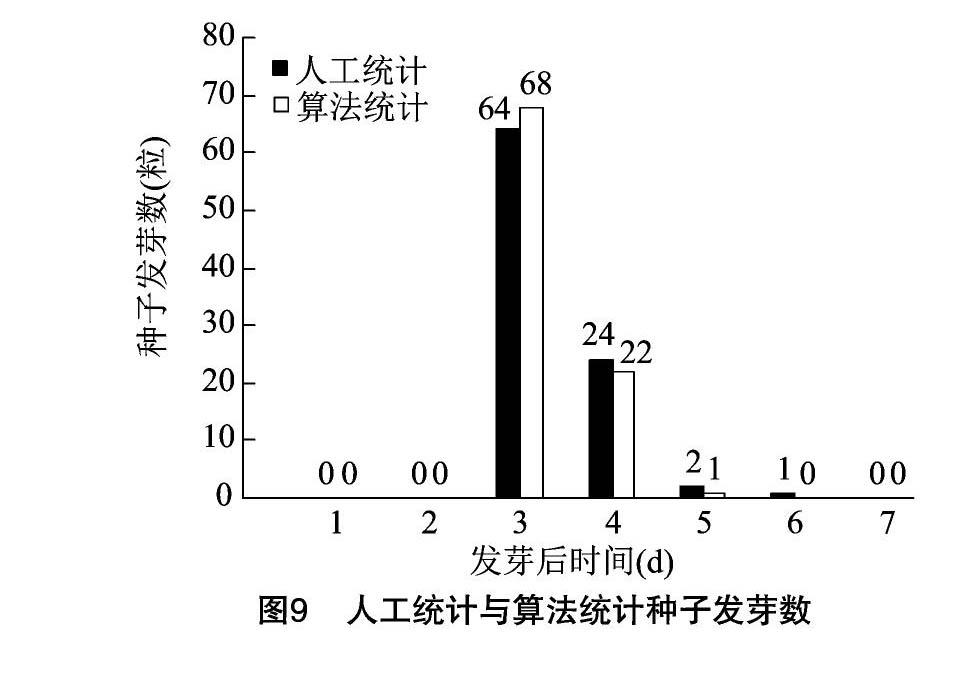
采集到种子的发芽图像后,根据上述的图像检测方法,对种子的发芽情况进行统计。将人工统计的结果与图像检测的结果进行对比,对比结果见图9。从图9可以看出,种子发芽的时间集中在3~4 d后, 从5d后开始种子的发芽率趋于稳定。 发芽试
验选取了100粒种子进行发芽,经过7 d的发芽试验后有91粒正常发芽,种子的发芽率为91%。
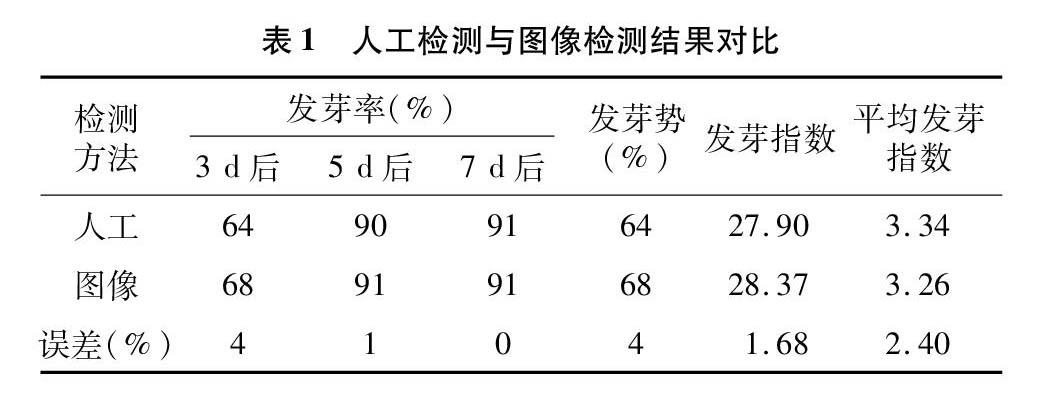
根据图9每天发芽个数统计结果,由公式(4)和公式(5)可以计算出发芽率、发芽势、发芽指数和平均发芽指数,统计结果见表1。试验结果表明,本研究设计的种子检测方法检测小麦种子的发芽率与人工检测发芽率一致,发芽势、发芽指数、平均发芽指数的误差分别为4%、1.68%、2.40%。造成第3天发芽判别率误差偏大的主要原因是种子的芽长和根长处于判定标准的临界状态,由于种子是固定在装置中进行发芽的,为了不影响其生长环境,人工测量是通过目测法进行判定,无法做到精确判定,而图像测量是对其进行精确测量,从而导致对处于临界状态下的种子的判定结果出现一定的偏差。在种子露白以后,每天种子的芽长和根长生长变化较大,很快就可以达到种子发芽的标准,因此人工目测法与图像统计的结果误差不会超过 1 d。
4 结论
利用数字图像处理技术检测种子发芽的算法可以提高测定种子活力的效率,并且能够统一评判标准从而避免主观误差。通过测定种子活力的试验,得到以下结论:(1)本研究搭建的基于工业相机的图像采集平台,采集方式简单、图像清晰,可以满足图像检测的要求。设计的小麦种子发芽装置,可以辅助种子发芽检测,提升了机器视觉检测种子发芽的准确性。(2)探讨了针对种子特点的图像阈值处理、形态学处理,设计了小麦种子芽点检测方法,并提出了一种基于芽点位置来判定种子发芽的方法,实现了对种子发芽过程的快速、无损检测。
本研究提出的方法对实现种子活力的自动检测具有可行性,可为实验室种子活力测定提供算法参考。图像处理技术测定种子活力,是一种非接触式的测定方式,且可以得到客观、可重复的试验结果,这使得种子活力指数计算结果更为可靠。因此,本研究提出的方法在代替传统种子活力检测方法方面具有较好的前景。
参考文献:
[1]蒋敏明. 种子活力研究进展及展望[J]. 中国种业,2018(6):15-18.
[2]李孝凡,王 成,宋 鹏,等. 种子活力无损检测方法研究进展[J]. 种子,2019,38(6):61-65.
[3]张本华,郝晓莉,李永奎,等. 种子活力及其测定方法研究[J]. 农机化研究,2006,28(6):86-87.
[4]郑雅潞,薛小雁,仇永康,等. 小麦种子活力测定方法的比较[J]. 江苏农业科学,2017,45(15):61-64.
[5]Kuska M,Wahabzada M,Leucker M,et al. Hyperspectral phenotyping on the microscopic scale:towards automated characterization of plant-pathogen interactions[J]. Plant Methods,2015,11:28.
[6]Nasir A K,Taj M,Khan M F.Evaluation of microsoft kinect sensor for plant health monitoring[J]. IFAC-PapersOnLine,2016,49(16):221-225.
[7]张慧春,王国苏,边黎明,等. 基于光学相机的植物表型测量系统与时序生长模型研究[J]. 农业机械学报,2019,50(10):197-207.
[8]张慧春,周宏平,郑加强,等. 植物表型平台与图像分析技术研究进展与展望[J]. 农业机械学报,2020,51(3):1-17.
[9]Howarth M S,Stanwood P C.Measurement of seedling growth rate by machine vision[C]//Proc SPIE 1836,Optics in Agriculture and Forestry,1993,1836:185-194.
[10]Deng F,Qi H N,Zhao G W.Seed vigor assessment for Cunninghamia lanceolata and Pinus massoniana using image processing[J]. Transactions of the Chinese Society of Agricultural Engineering,2012,28(S2):274-279.
[11]李 振. 基于机器视觉技术的蔬菜种子质量检测方法研究及系统设计[D]. 合肥:安徽大学,2016.
[12]王纪章,顾容榕,孙 力,等. 基于Kinect相机的穴盘苗生长过程无损监测方法[J]. 农业机械学报,2021,52(2):227-235.
[13]金沙沙,贾良权,龙 伟,等. 基于特征选择与骨架提取的种子萌发的芽长、根长检测[J]. 江苏农业学报,2021,37(3):597-605.
[14]侯加林,房立发,吴彦强,等. 基于深度学习的生姜种芽快速识别及其朝向判定[J]. 农业工程学报,2021,37(1):213-222.
[15]张 晗,王 成,董宏图,等. 基于机器视觉的白菜种子精选方法研究[J]. 农机化研究,2021,43(12):31-36.
[16]刘国华. HALCON数字图像处理[M]. 西安:西安电子科技大学出版社,2018:86-87.
[17]Wiegand T,Schwarz H.Video coding:part Ⅱ of fundamentals of source and video coding[M]. Hanover:Now Publishers,2016.
[18]杨 青. 机器视觉算法原理与编程实践[M]. 北京:北京大学出版社,2019.
[19]全国农作物种子标准化技术委员会. 农作物种子检验规程 发芽试验:GB/T 3543.4—1995[S]. 北京:中国标准出版社,1996.
[20]付丽娜,王玉泉,张自阳,等. 杂交小麦种子发芽不同时期内源激素的变化与种子活力的关系[J]. 种子,2020,39(11):26-30.
