基于SMO的改进型转子位置检测方法
2021-01-06赵亚辉冯明李卫文
赵亚辉,冯明,李卫文
(北京科技大学 机械工程学院,北京100083)
近年来,随着材料技术、电力电子器件、高性能集成电路的发展,基于矢量控制技术的永磁同步 电 机(Permanent Magnet Synchronous Motor,PMSM)由于其结构简单、功率密度高、可与高速负载直接相连等特点[1-2],被广泛应用于高速空气压缩机、高速机床主轴等工业领域,在航空航天和新能源等领域也有着广阔的应用前景。为实现PMSM的高精度控制,需要获得精确的转子位置和速度信息,可以通过光电码盘、测速发电机、旋转变压器等传感器获取,但会带来电机成本增加、安装维护困难、易受外界干扰等问题,影响电机的可靠性。因此,PMSM 的无位置传感器控制技术成为高速电机控制领域的研究热点[3-5]。由于超高速电机的绕组电感和内阻非常小,一旦控制失步会引起绕组电流迅速增加,烧毁功率器件甚至造成电机转子磁钢退磁,因此保证控制器准确地检测电机转子位置尤为重要。
目前,常用的转子位置估计方法有反电势积分法[6-8]、模型参考自适应法[9]、扩展卡尔曼滤波法[10]、滑模变结构观测器法[11-12]等。其中,反电势积分法易受电机参数变化的影响,且存在定子磁链积分的常值漂移问题;模型参考自适应法虽计算简单,但对参数变化比较敏感;扩展卡尔曼滤波法实时计算量大,对控制芯片的依赖度高,且动态响应不理想;滑模变结构观测器法响应速度优于模型参考自适应法,但滑模控制率中的开关函数具有不连续性,易引起系统抖振。而文献[13-15]中分别采用饱和函数、双曲正切函数和边界层可变的正弦型饱和函数代替开关函数,起到了抑制滑模抖振的作用。
在传统滑模观测器(Sliding Mode Observation,SMO)的基础上,提出基于SMO的改进型转子位置检测方法。该方法采用S型函数代替传统的开关函数来估算反电动势,有效地减小了传统SMO所带来的抖振现象,估算的反电动势通过软件锁相环(Software Phase Locked Loop,SPLL)计算转子位置角对转子位置进行实时跟踪估计,可以提高系统的跟踪精度并改善系统的控制性能,削弱SMO抖动对转子位置角的影响,实现PMSM在高速运行状态转子位置角的观测。通过仿真和实验证明该改进型SMO算法的高精度性和稳定性,使电机能在超高速状态下平稳运行。
1 永磁同步电机数学模型
表贴式PMSM在α-β定子静止坐标系下数学模型可以表示为[15]
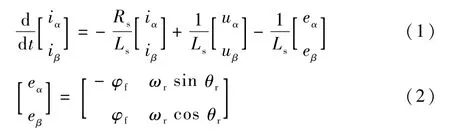
式中:uα、uβ,iα、iβ和eα、eβ分别为α-β定子静止坐标系下的定子电压,定子电流和反电动势;Rs和Ls分别为定子的电感和相电阻;θr为转子位置角;φf为转子磁链;ωr为转子永磁体的旋转速度。
由于采用id=0的电流控制方法,稳态时其空间矢量图如图1所示。当前输出的电压空间矢量为us,对应的is正好在q轴上,满足id=0,且is的旋转速度为ωs;转子永磁体等效励磁磁链φf的方向与d轴相同,d轴方向为转子永磁体的S-N方向,其旋转速度为ωr。当PMSM 运行稳态时,有ωs=ωr。θr为d轴与α轴的夹角,也即需要观测的电机转子位置角。
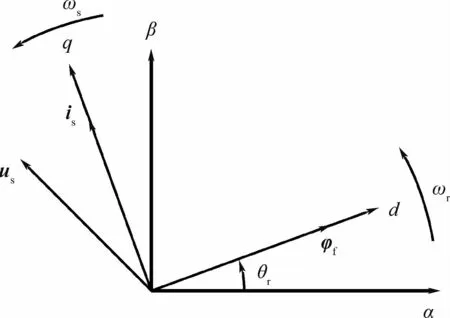
图1 稳态空间矢量Fig.1 Space vector at steady state
2 滑模观测器(SMO)的改进
2.1 传统SMO
结合表贴式PMSM在α-β定子静止坐标系下的数学模型,并根据滑模变结构控制理论,构造SMO方程[16]

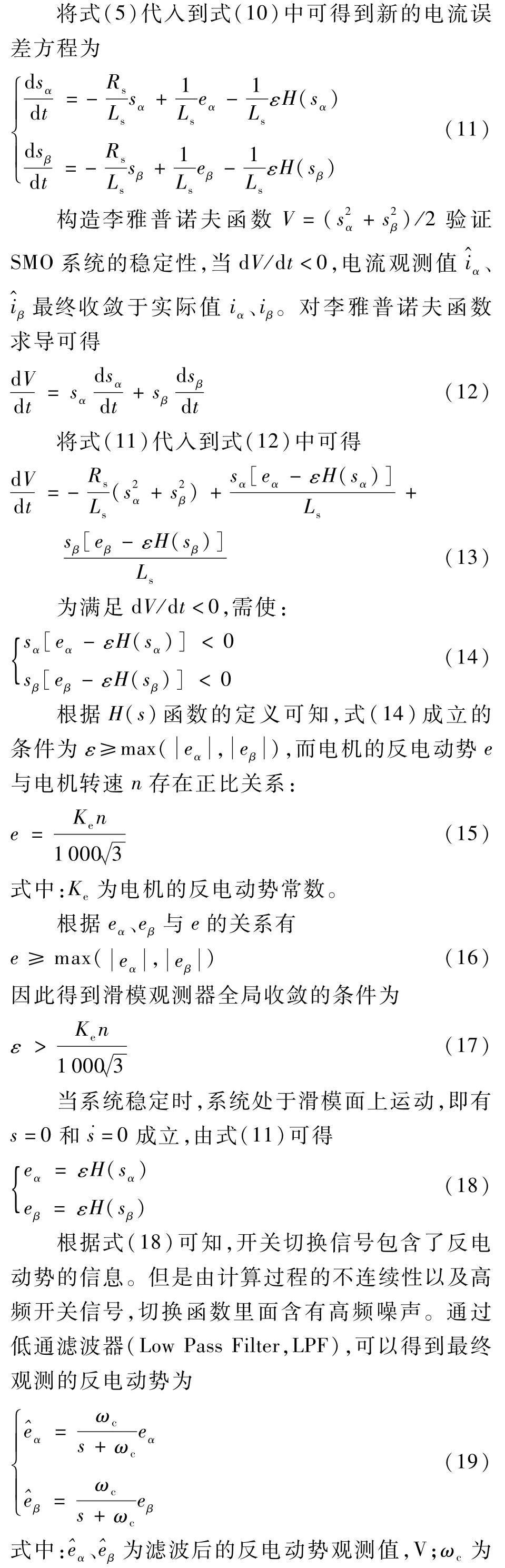
2.2 切换函数的改进
传统SMO一般选取符号函数Z=sgn(s)作为切换函数,它使得观测器的响应非常迅速,抗扰动性强,但是其固有的非线性开关特性会引起系统抖振,从而影响位置估算精度[17]。为了抑制抖振,采用一种新的连续切换函数为

式中:a、ε为正数,a用来调整S型函数的斜率,ε用来调整收敛于滑模面的速率;H(s)为S型切换函数。
2.3 转子位置角计算方法的优化
由于SMO在滑动模态下伴随着高频抖振,估算的反电势存在高频噪声信号,而基于反正切函数的转子位置估计方法将这种高频噪声信号引入到反正切函数的除法运算中,导致高频抖振被放大,造成较大的角度估计误差[16],使电机不能在超高速状态下稳定工作。因此本文引入SPLL算法计算转子位置角,消除计程中的高频噪声信号。
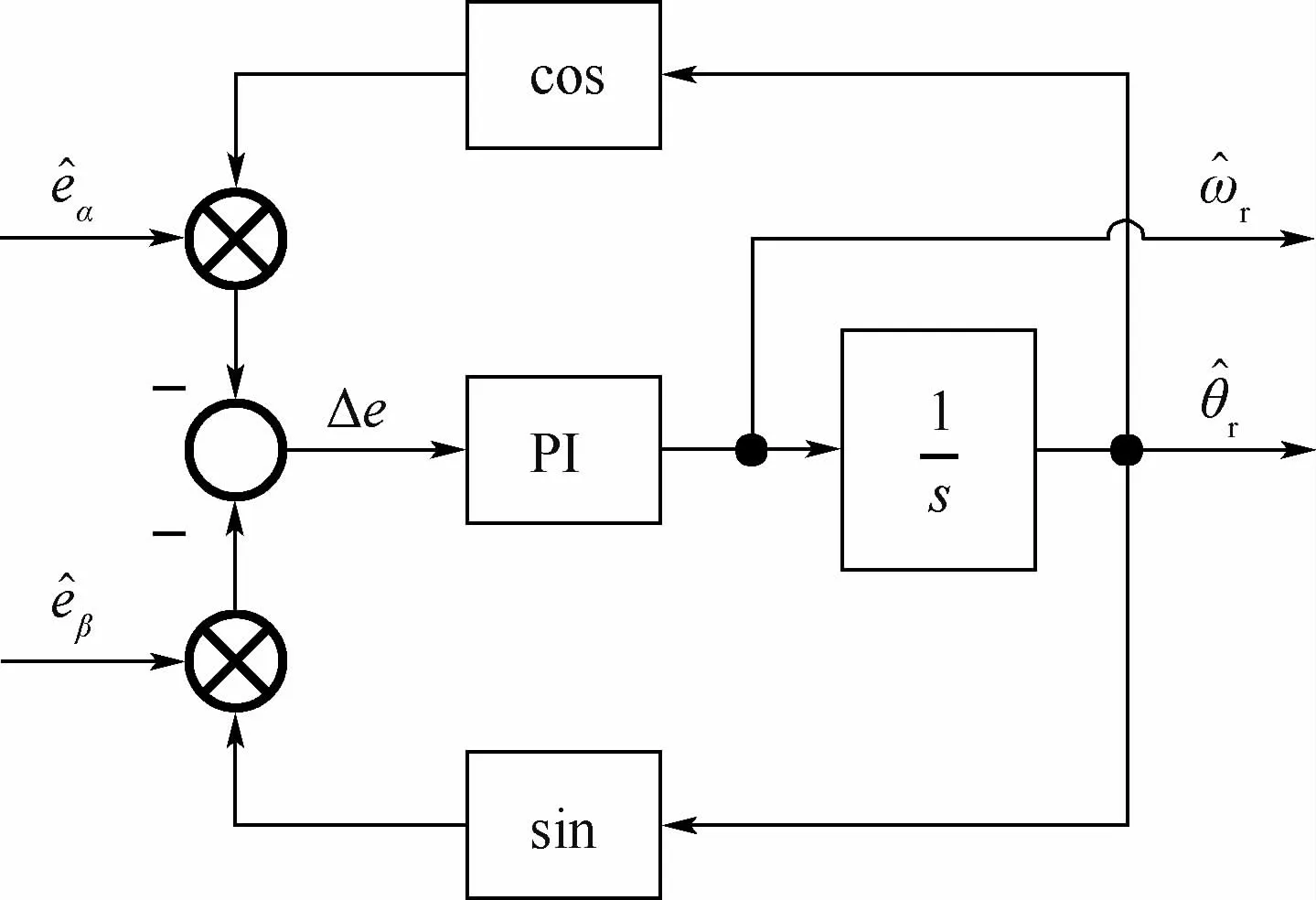
图2 SPLL算法示意图Fig.2 Schematic of SPLL algorithm
由式(25)可知,通过三角函数和差公式构建鉴相器可以衡量相位差的大小,通过PI控制使转子位置角误差衰减至零即可求解电机转子位置和角速度,算法如图3所示,kp和ki分别为比例和积分系数。
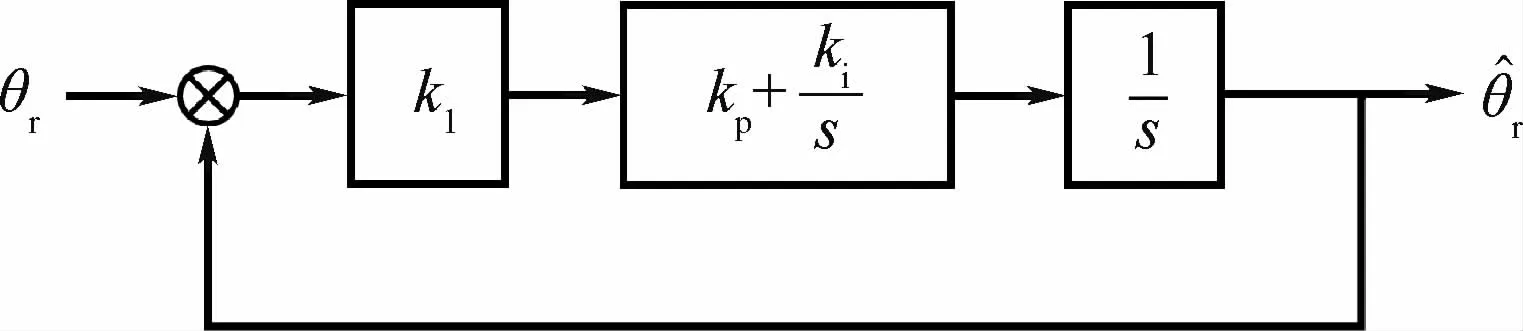
图3 简化SPLL算法Fig.3 Simplified SPLL algorithm

式中:Ts为控制周期。
实际应用中,使用转速和电流双闭环控制PMSM超高速运行时,转速环控制周期是电流环控制周期的5~10倍,电机转速更快速趋于稳态。利用平均算法将式(29)写成

式中:j为正整数,满足5≤n≤10。
式(30)只需要转子位置角信息就可以计算出转速,对于无位置传感器控制具有通用性。
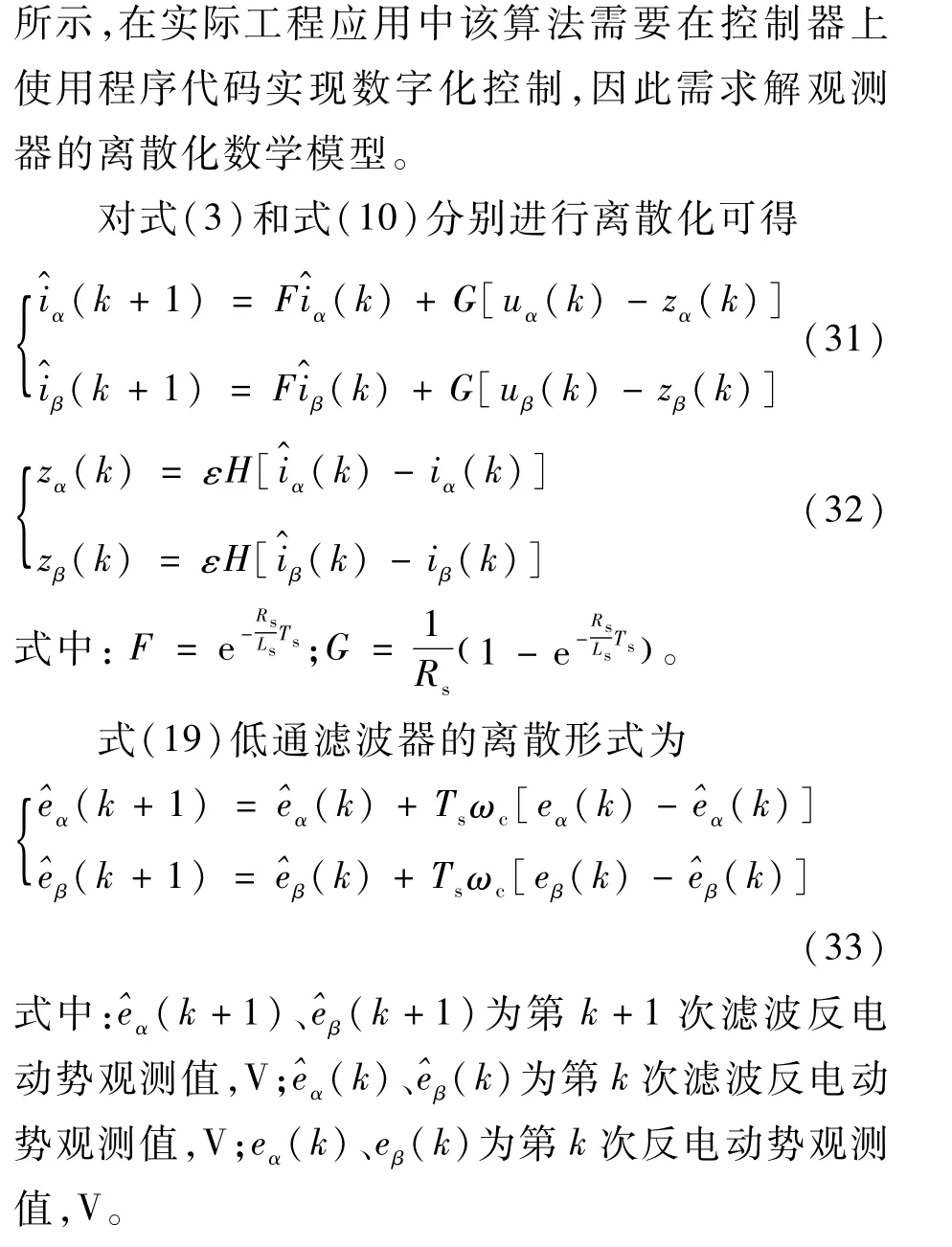
2.4 改进SMO算法的离散化处理及实现
本文所提改进SMO算法的结构框图如图4
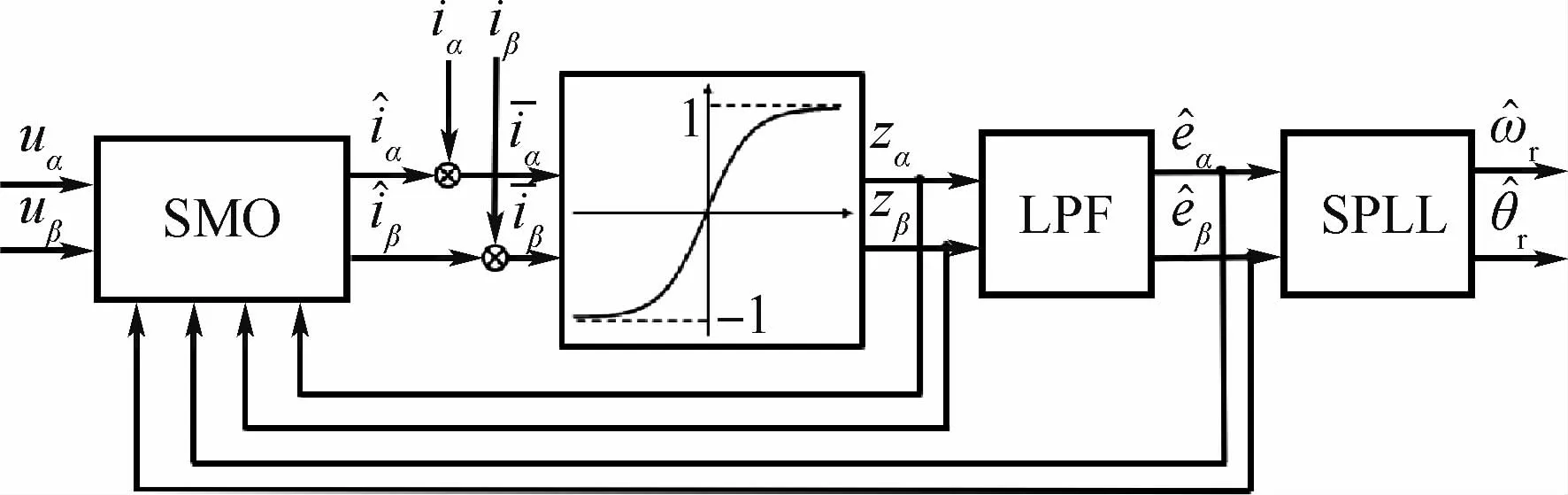
图4 改进SMO算法结构框图Fig.4 Improved SMO algorithm block diagram
定时器中断程序框图如图5所示,根据程序框图即可实现该算法的数字化控制。图中:iA和iC分别为电机A、C相电流采集值;uDC为母线电压采集值;err(k+1)为PI控制器的控制偏差Δe;err_err(k+1)为PI控制器的控制偏差的偏差;ωinc为角速度增量;X、Y、Z分别为计算矢量作用时间的中间变量。分支虚线框为传统SMO计算,分支实线框为改进SMO计算,由程序框图可知,在切换函数计算、位置角计算2个模块中,改进SMO算法比传统SMO算法多了1次三角函数运算、1次除法运算、2次指数运算和6次乘法运算,算法复杂度稍有提升。本文采用的控制频率为15 kHz,定时器中断执行周期为66.67μs,经测试传统SMO算法的执行时间为14μs,改进SMO算法的执行时间为19μs;使用改进SMO算法的整个定时器中断执行时间为35μs左右,耗时占控制周期的52.5%,因此可以满足执行算法的实时性和快速性要求。

图5 定时器中断程序框图Fig.5 Timer interrupt program block diagram
3 系统仿真
本文控制对象为一台燃料电池汽车离心式空气压缩电机,如图6所示,电机参数如表1所示。
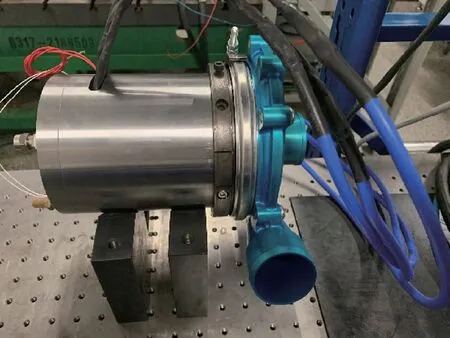
图6 实验用空气压缩机Fig.6 Experimental air compressor
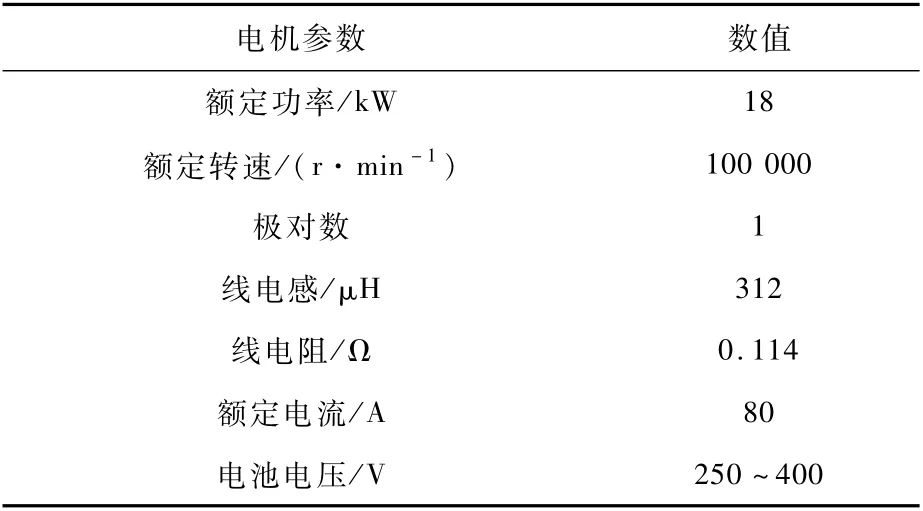
表1 实验用空气压缩机电机参数Tab1e 1 Air compressor motor parameters for experiment
图7为PMSM矢量控制系统框图。该控制系统采用id=0的控制方法,其中nref为电机转速设定值;转速环、d轴电流环和q轴电流环均采用PI控制;转速环根据转速误差输出q轴电流环的设定值,d轴电流环和q轴电流环分别输出目标电压矢量us在d-q坐标系下目标电压矢量;ud、uq经过Park逆变换可以得到us在α-β坐标系下的坐标uα、uβ,SVPWM 算法模块可以根据uα、uβ计算出功率开关的控制信号,来控制驱动控制器中逆变模块实现PMSM 的矢量控制。图中:idref和iqref分别为d、q轴电流参考值。
根据矢量控制原理和电机参数对改进型转子位置检测方法进行仿真建模,如图8所示。
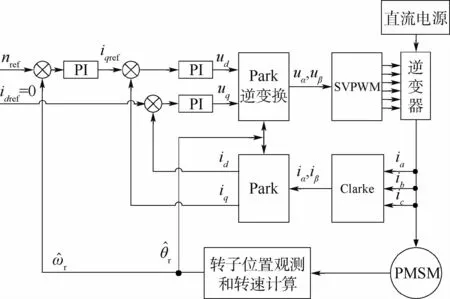
图7 PMSM矢量控制系统框图Fig.7 PMSM vector control system block diagram
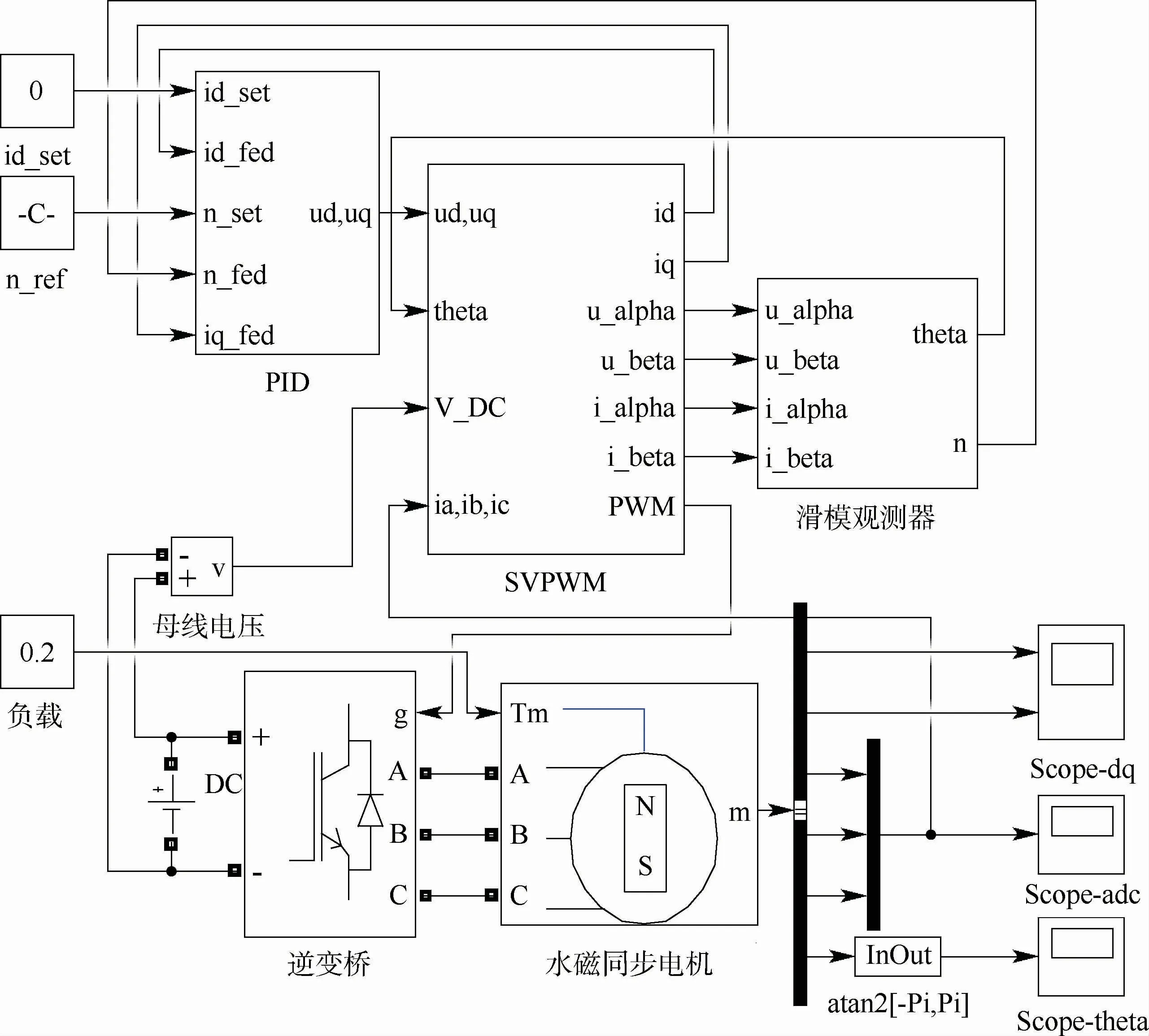
图8 改进型SMO仿真模型Fig.8 Improved SMO simulation model
在仿真模型中使用传统SMO控制,电机转速在50000 r/min时转子位置角抖动很大,限制了电机进一步提速,因此以50000 r/min转速为例对转子位置角波形进行对比分析。图9为传统SMO观测角度和改进切换函数观测角度的波形对比,转子位置角转化到-π~π范围。图中实线为实际转子位置角,点画线为传统SMO观测的转子位置角,虚线为改进切换函数观测的转子位置角角。右下角局部放大图为转子位置角从π经过一个电周期切换到-π时的波形,从图中可以看出传统SMO有5次切换过程,而改进切换函数只有一次切换,说明改进切换函数提高了切换准确率,但是与实际切换位置仍有10μs偏移时间。从图9中左上角局部放大图可以看出,传统SMO观测的转子位置角抖动较大,而改进切换函数观测的转子位置角抖动减小,但存在转子位置角滞后,而且抖动问题仍然比较明显。
图10为传统SMO观测角度和改进SMO观测角度的波形对比。实线为实际转子位置角,点画线为传统SMO观测的转子位置角,虚线为改进SMO(改进切换函数并使用SPLL计算位置角)观测的转子位置角。从图10中2个局部放大图的波形可以看出,在改进切换函数并引入SPLL计算的转子位置角波形和电机实际转子位置角波形接近,切换位置偏移时间减小到4μs,传统SMO观测的转子误差最大为0.08 rad,改进SMO观测的转子误差最大为0.02 rad,转子位置角静态误差被消除,几乎无抖动现象。验证了改进SMO观测的电机转子位置角抖动小,更接近电机实际位置。
通过以上分析可知,本文提出的改进型转子位置检测方法可以有效削弱传统SMO抖动,提高转子位置角切换准确性。

图9 改进切换函数转子位置角波形对比Fig.9 Comparison of improved switching function rotor position angle waveforms
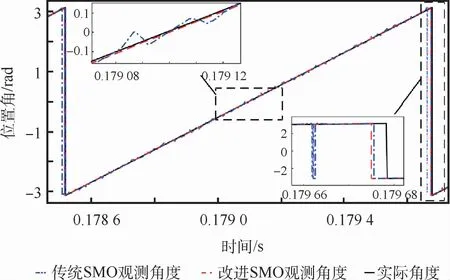
图10 改进SMO转子位置角波形对比Fig.10 Comparison of improved SMO rotor position angle waveforms
4 实验验证
4.1 控制器设计
采用改进型转子位置检测方法研发的高速PMSM控制器如图11所示。控制器由主控板和驱动板组成,主控板使用TI公司TMS320F28335数字处理芯片,主要负责采集电压电流信号、观测转子位置角并通过FOC算法产生PWM 输出,驱动板主要负责直流母线输入和三相PMSM 电压输出,并进行电压电流采集、IGBT驱动、突波吸收和硬件保护等,此外驱动电机高速运行时还需要使用水冷器散热。

图11 实验控制器Fig.11 Experiment controller
4.2 实验平台
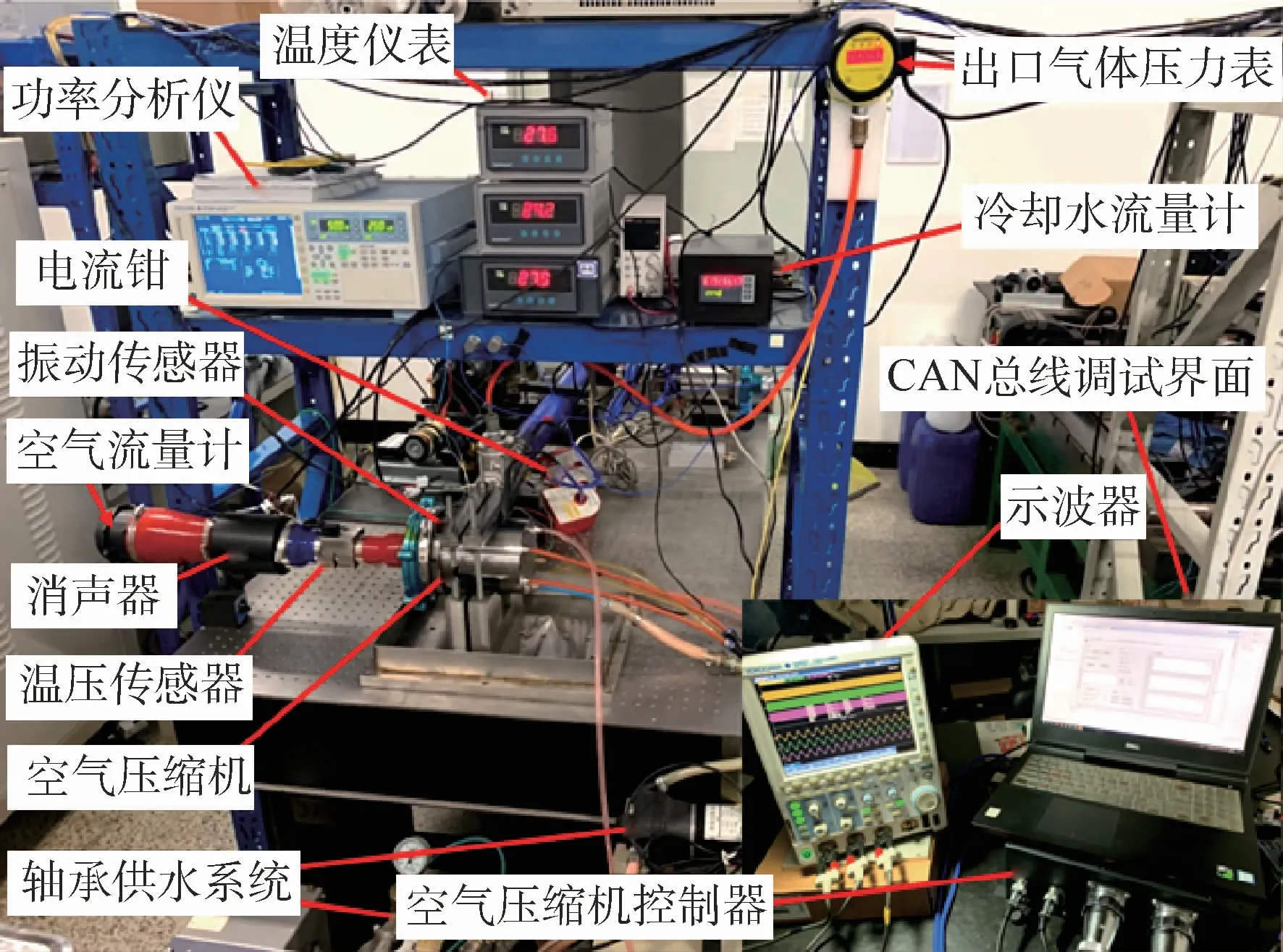
图12 实验平台Fig.12 Experiment platform
为验证本文提出的改进SMO方法的有效性,搭建图12所示燃料电池汽车空气压缩机控制器实验台进行实验验证。功率分析仪用于观测电机的电流、电压波形,测量电机的功率、效率以及功率因数等;温度仪表用于测量电机内部绕组、蜗壳和轴承水的温度;冷却水流量计用于测量提供给水润滑轴承润滑水和冷却水的流量;出口气体压力表用于测量出气口的空气压力;电流钳与示波器和功率分析仪配合,用于测量三相电流;振动传感器用于测量电机的振动情况,并根据振动频率计算出电机的实时转速;空气流量计用于测量进气口的空气流量;温压传感器用于测量空压机进出口温度和压力;消声器用于减弱空压机运行时的噪声;空气压缩机即本文的控制对象,用于给燃料电池电堆提供高压空气;轴承供水系统用于给空压机的水润滑轴承供水及回水;CAN总线调试界面用于控制空压机的启停以及调速等;示波器用于观察电机的电压、电流波形以及对电流进行频谱分析;空气压缩机控制器即本文开发的燃料电池汽车空气压缩机控制器。
4.3 实验分析
在实验中,通过控制器片外RAM 芯片保存DSP的运算数据,使用Python上位机进行数据分析。直流母线电压为400V,在20000~98000 r/min范围内对传统SMO和改进SMO算法进行对比实验研究。
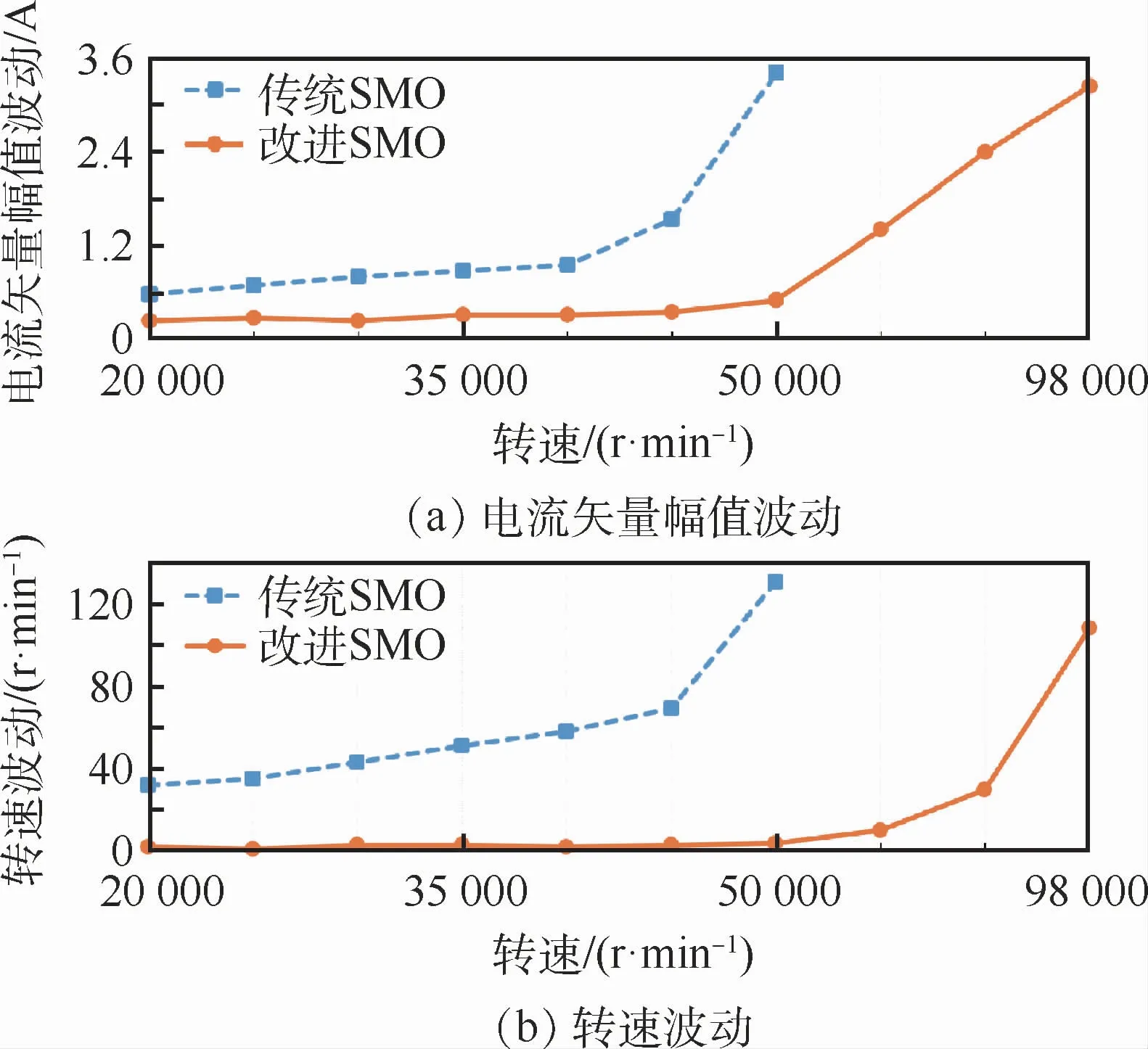
图13 电流矢量幅值及转速波动(用标准差测量)Fig.13 Current vector amplitude and speed fluctuations(measured by standard deviation)
图14为传统 SMO 和改进 SMO 算法在50 000 r/min转速时转子位置角波形。从图可以看出,传统SMO计算的转子位置角有明显的抖动;而改进SMO计算的转子位置角基本无抖动,可见改进SMO算法减弱了系统高频抖振,提高了转子位置的观测精度。图中:66.667μs为控制周期。
图15为传统 SMO 和改进 SMO 算法在50 000 r/min时的电机相电流波形。从图中可以看出,传统SMO控制时电流波形抖动较大,与正弦波形也相差较远;而改进型SMO控制电流波形抖动较小,接近理想的正弦波形。
图16为传统 SMO 和改进 SMO 算法在50 000 r/min转速下电机相电压和相电流谐波分析。从图中可以看出,与传统SMO相比改进型SMO的相电压谐波含量减小2.8倍,相电流谐波含量减小2倍,说明该改进型SMO算法可以有效减小电压和电流谐波,降低了逆变器的开关损耗和空气压缩机的发热损耗,提高了空气压缩机系统的运行效率。
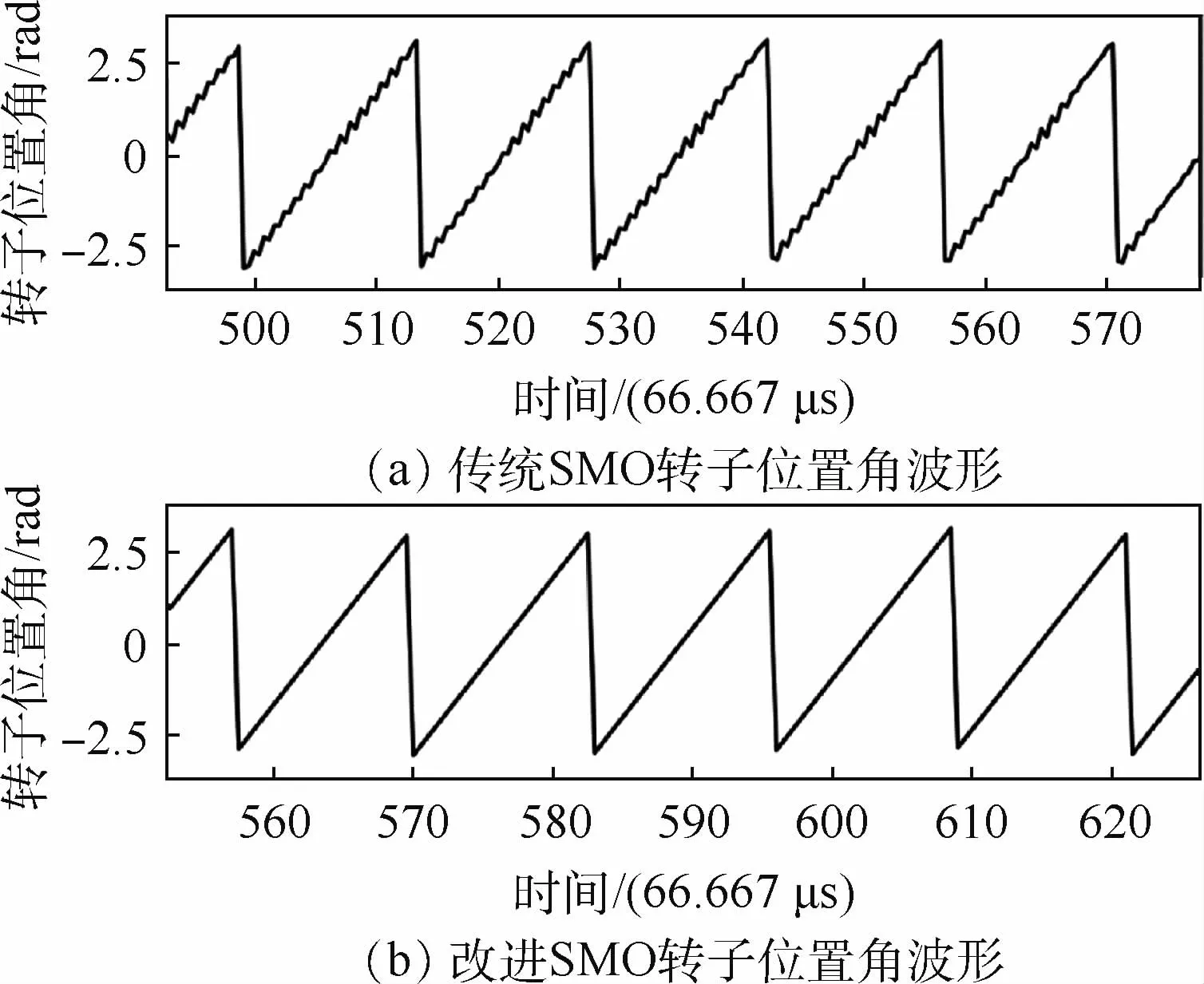
图14 传统SMO和改进SMO转子位置角波形(转速为50 000 r/min)Fig.14 Traditional SMO and improved SMO rotor position angle waveform(rotating speed equals to 50 000 r/min)
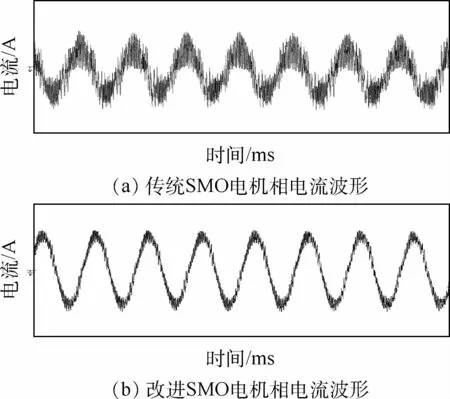
图15 传统SMO和改进SMO电机相电流波形(转速为50 000 r/min)Fig.15 Traditional SMO and improved SMO motor phase current waveform(rotating speed equals to 50 000 r/min)
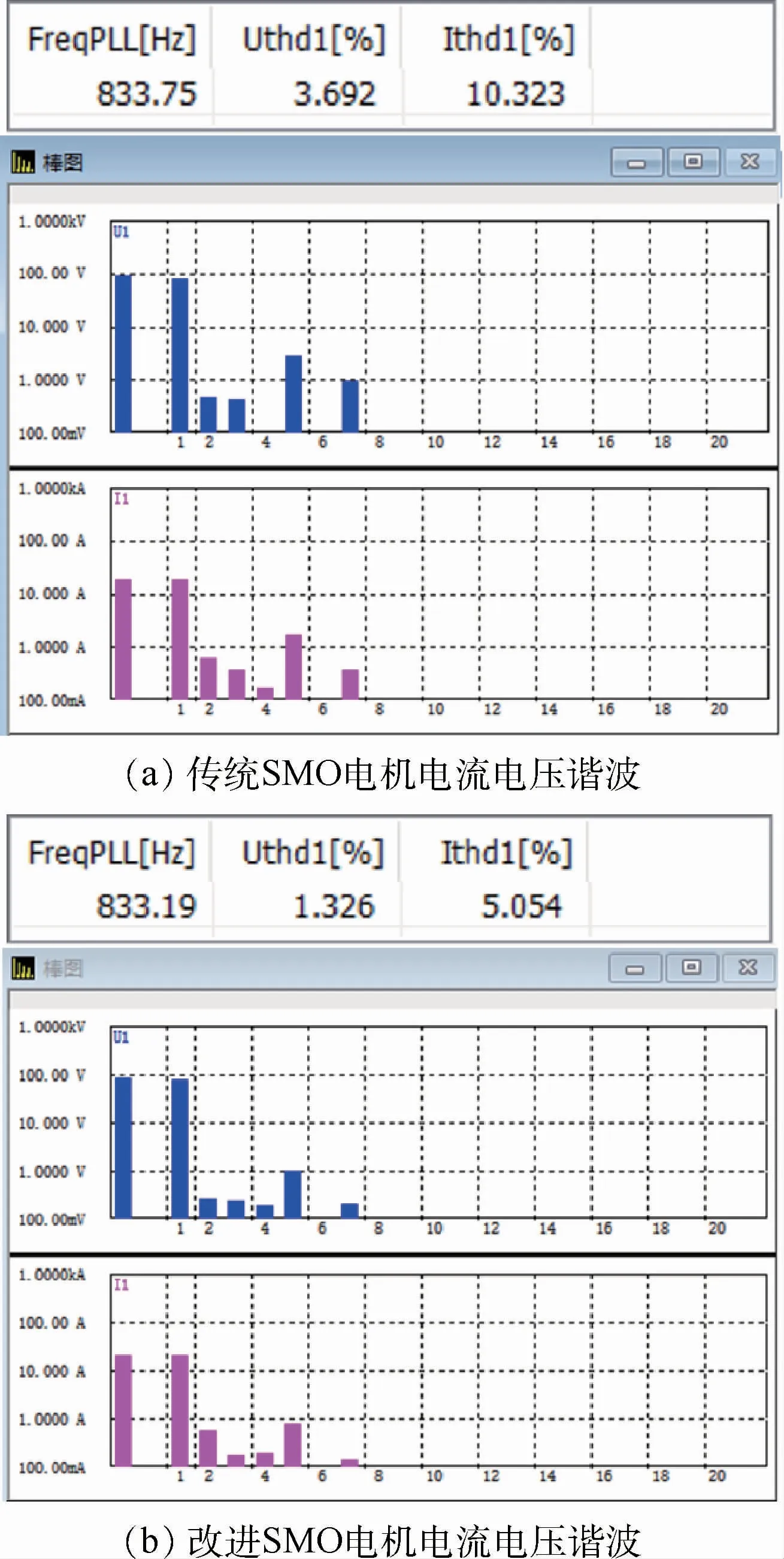
图16 传统SMO和改进SMO电机电流电压谐波Fig.16 Traditional SMO and improve SMO motor current voltage harmonics
改进型SMO在更高转速时其控制效果也有很好的表现。图17为改进SMO 算法控制在98 000 r/min时转子位置角和相电流波形。从图中可以看出,转子位置角的抖动不明显,且电流波形仍然很接近正弦波,验证了改进SMO算法在高速时的实时性和可行性。
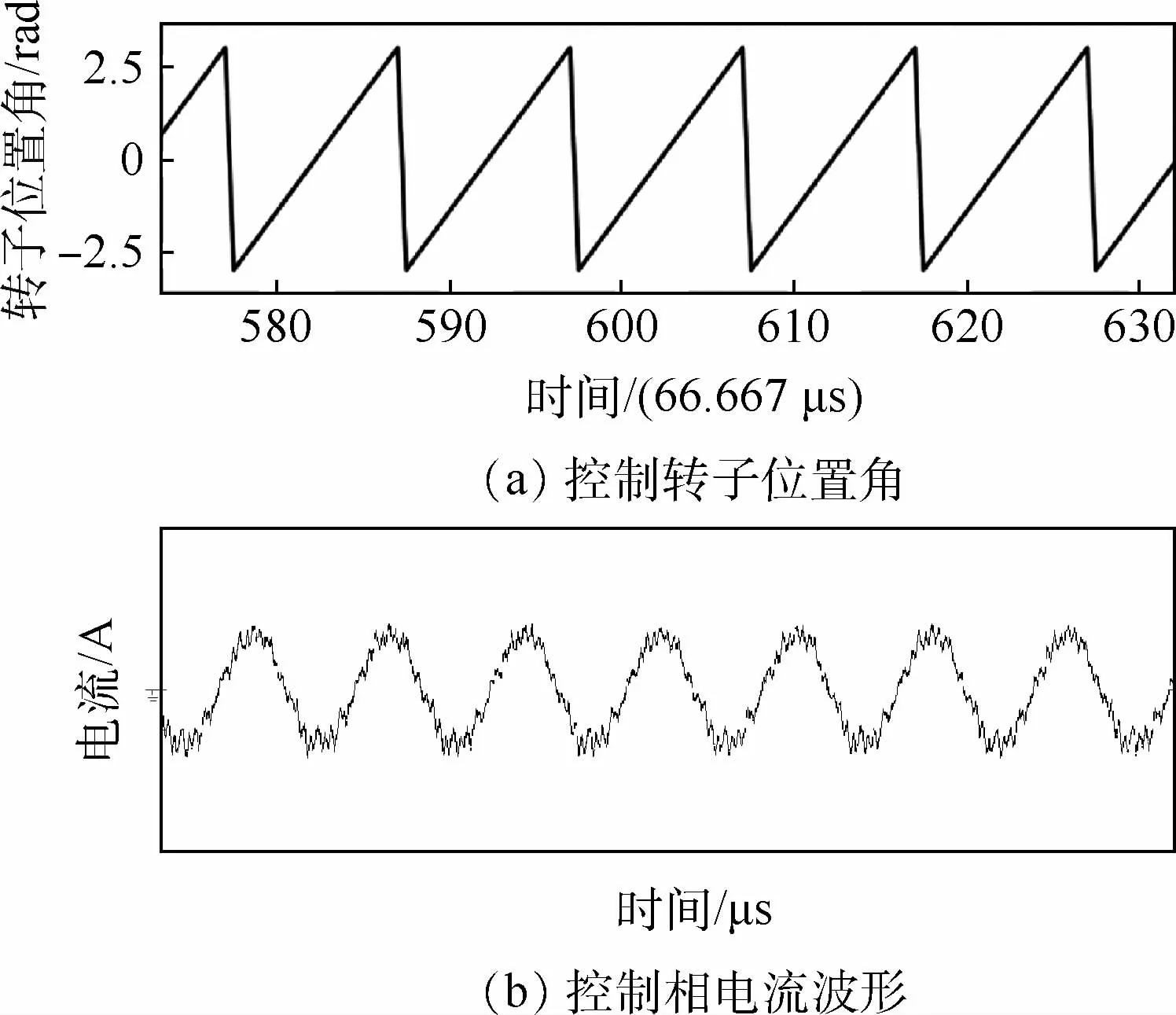
图17 改进SMO控制转子位置角和控制相电流波形(转速为98 000 r/min)Fig.17 Improved SMO control rotor position angle and control with phase current waveform(rotating speed equals to 98 000 r/min)
5 结 论
针对高速PMSM 无位置传感器控制提出了一种改进型转子位置检测方法,使用S型切换函数并引入SPLL算法计算转子位置角,有效改善了传统观测器固有的观测精度低、抖振问题。通过理论分析及实验验证,证明了该算法的可行性和稳定性。仿真和实验结果表明:
1)相对传统SMO算法,改进SMO算法可以削弱转子位置角的抖动,提高转子位置角的估计精度,转速升至98000 r/min时转子位置角抖动仍较小,相电流波形接近正弦,验证了改进SMO算法的有效性和正确性。
2)采用SPLL结构避免了转子位置角的计算误差,提高了观测精度。该方法对电机的参数和负载扰动具有较强的鲁棒性,系统稳定性和动态性能良好。通过实验对比得到该改进算法使相电压谐波含量减小2.8倍,相电流谐波含量减小2倍,验证了该算法在减小电压和电流谐波的有效性,提高了空气压缩机系统的效率。
3)针对燃料电池汽车空气压缩机开发出满足车载使用要求的100 000 r/min、18 k W 的无位置传感器高速PMSM 矢量控制器。该控制器采用本文所提出的新型控制策略减弱了系统高频抖振,减小了电机的转速波动、电流和电压谐波,更利于电机的动态控制,提高了空气压缩机系统的工作性能。
