基于区间二型T-S模糊系统的压电迟滞特性建模
2021-01-05陈圣鑫赵新龙苏良才
陈圣鑫,赵新龙,苏 强,苏良才
(浙江理工大学 机械与自动控制学院,浙江 杭州 310018)
0 引言
压电驱动器作为一种可以将电能转化为机械运动的微位移元件,由于其体积小,精度高等特点被广泛应用于超精密系统中。但是,其固有的迟滞特性会降低精密系统中的控制精度,甚至影响系统的稳定性[1-3],故而需要对迟滞进行建模。Takagi-Sugeno(T-S)模糊模型因其结构简单、辨识精度高的特点而被广泛应用于复杂非线性系统的建模[4-6]。T-S模型的结构辨识主要包括模糊区间的划分、模糊前件参数和后件参数辨识。
在模糊区间划分方面,模糊聚类算法得到了广泛应用,主要有模糊C均值(FCM)聚类算法和模糊C回归模型(FCRM)聚类算法等。其中,FCM聚类算法作为以欧氏距离为依据进行区间划分的方法,更适用于超球型的模型结构。FCRM聚类算法作为一种超平面型聚类算法,其迭代产生的超平面与T-S模糊模型的子模型有相似的结构, FCRM聚类算法更适合于T-S模型模糊区间的划分。KUNG等[7]提出了FCRM聚类算法的有效性准则,用来选择合适的聚类个数,但对于给定的压电输入信号来说,所需划分的聚类个数有限,并不需要有效性准则的判断。CHANG等[8]使用垂直距离公式替换了传统聚类算法的误差公式,使聚类划分更准确,但并未进一步考虑聚类算法和模型的结构匹配问题。在模糊前件参数辨识方面,LI等[9]提出了新的超平面型隶属度函数,解决了传统超球面钟型高斯函数与超平面型FCRM聚类算法结构不匹配的问题。在后件参数辨识方面,利用最小二乘法来完成模糊后件参数的辨识。
基于一型模糊集的T-S模糊系统已用于复杂非线性系统建模[10-11],但是一型模糊集的隶属度值是清晰的,在处理不确定性方面存在局限性[12-14]。区间二型模糊集通过将隶属度由清晰值扩展到一个区间值,把隶属度进一步模糊化,可以更有效地处理系统的不确定性和非线性[15-17]。
本文基于文献[18]提出的区间二型FCRM聚类算法,用垂直距离更新了算法中的误差计算[8],提出了改进的区间二型FCRM聚类算法。引入超平面隶属度函数[9],解决了超球型高斯隶属度函数与改进超平面型聚类算法的结构不匹配的问题。与其他建模方法相比,本文的创新点是:
1) 用垂直距离公式替换了传统FCRM聚类算法的误差公式,使聚类算法与其所辨识的超平面结果直接相关联,提高了模糊区间划分精度。
2) 用超平面隶属度函数替换了传统的超球型高斯隶属度函数,使其与改进超平面型聚类算法的结构相匹配,提高了建模精度。
1 基于区间二型T-S模糊模型的压电迟滞特性建模
1.1 压电驱动器迟滞建模

区间二型T-S模糊模型的结构辨识过程如下:
2) 结合模糊隶属度函数进行模糊模型前件参数的辨识。
3) 利用最小二乘法进行模糊模型后件参数的辨识。
1.2 区间二型T-S模糊模型辨识
1.2.1 模糊空间划分
假设将n个数据(xk,yk)(k=2,…,n)划分为c个聚类,则每个聚类中的数据样本都符合一个线性回归模型,该模型实际上是一个超平面回归函数,其中第i(i=1,…,c)个超平面可表示为
(1)

为了匹配二型模糊区间的上、下隶属度,引用上、下超平面的形式[18]。利用加权最小二乘法,得到上、下超平面系数:
(2)
(3)
其中
(4)
Y=[yk](n-1)×1
(5)
(6)
(7)

降型得超平面系数[18]:
(8)
为了使聚类划分更精确,引入了垂直距离公式[8]:
(9)
式中dik(Qi)为xk到第i个超平面的垂直距离。

(10)
(11)
式中:m1,m2∈(1,)且m1≠m2;U=[uik]c×(n-1)为模糊划分矩阵;uik∈[0,1]为第k组数据隶属于第i个超平面的隶属度。
利用拉格朗日乘子法,式(10)、(11)可写为
(12)
(13)
式中:λk为拉格朗日乘子;L1(U,λ)和L2(U,λ)分别对λk和uik求偏导,得到uik的最优值:
(14)
(15)

(16)
(17)
降型得隶属度uik的精确值[18]:
(18)

步骤4:通过式(18)得到uik,得到新的模糊划分矩阵Ur+1=[uik]c×(n-1)。
步骤5:比较Ur和Ur+1,如果满足‖Ur-Ur+1‖≤ε,迭代结束;否则,r=r+1,重复步骤2~5。
引用式(9)替代了文献[18]中的误差计算公式,通过使聚类算法与其所辨识的超平面结果直接相关联,使聚类的划分更精确。
1.2.2 前件参数辨识
钟型高斯函数作为超球面隶属度函数,具有明确的聚类中心和宽度,与本文所提超平面聚类算法结构不符。本文采用超平面隶属度函数[9],则输入xk对应第i个模糊集合Bi的上、下模糊隶属度函数为
(19)
(20)
第i条规则的激活强度ωi(xk)为
(21)
输入xk对应的区间二型T-S模糊模型的输出如下:
(22)
1.2.3 后件参数辨识
确定了模糊前件,可以通过下式得到模糊后件参数:
y=A·θ
(23)

(24)
其中
(25)
(26)
在本文中,利用最小二乘法来辨识式(23)中的θ为
θ=(ATA)-1XTy
(27)
2 实验与仿真
整个实验平台由压电驱动器(PZT-752.21C)、 dSPACE DS1103、电压放大模块(E-505.00)、传感器模块(E-509.C1A)、控制台组成,用于实验数据的采集,实验平台如图1所示。然后针对10 Hz、50 Hz、100 Hz正弦输入进行模型验证。最后在正弦衰减输入下,与文献[10]中的建模方案进行对比。
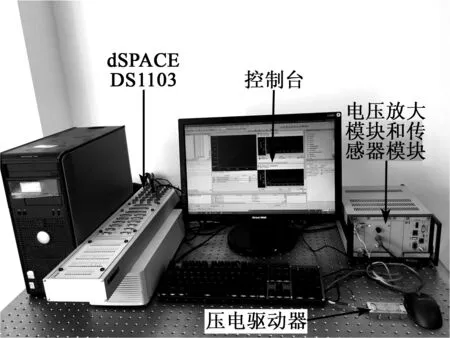
图1 实验平台
输入信号为x(t)=0.1sin(2πft),输入频率f=10 Hz、50 Hz、100 Hz,给定参数τ=4,c=5,m1=1.7,m2=3.3,ε=0.001。
图2~4为f=10 Hz、50 Hz、100 Hz时模型输出与实际输出曲线。图5~7为f=10 Hz、50 Hz、100 Hz时的误差曲线。表1为不同输入频率下的模型误差。
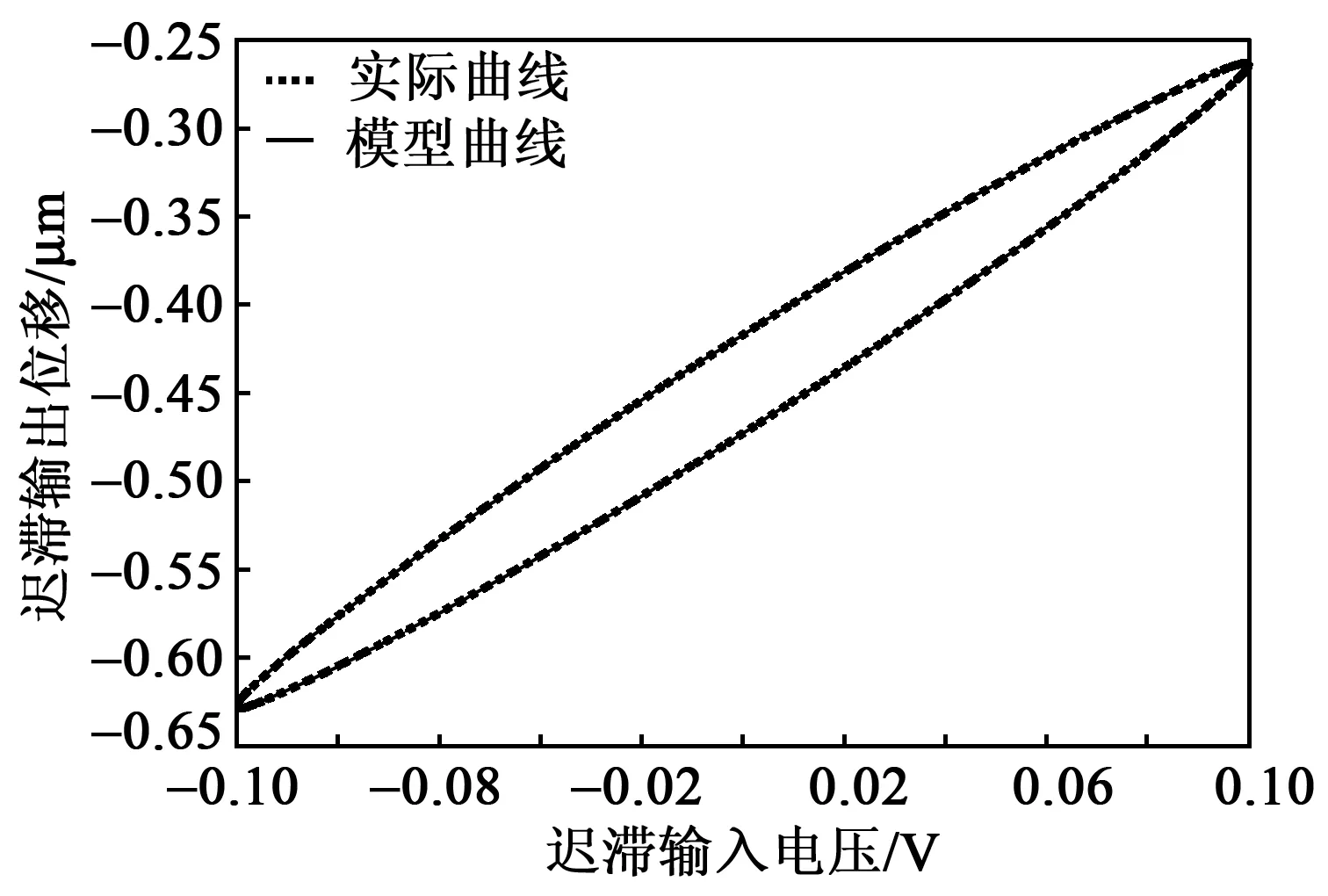
图2 f=10 Hz时实际与模型输出曲线

图3 f=50 Hz时实际与模型输出曲线
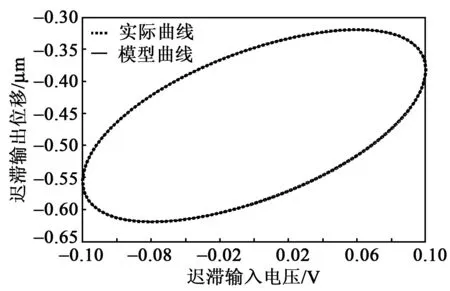
图4 f=100 Hz时实际与模型输出曲线

图5 f=10 Hz时实际模型误差曲线
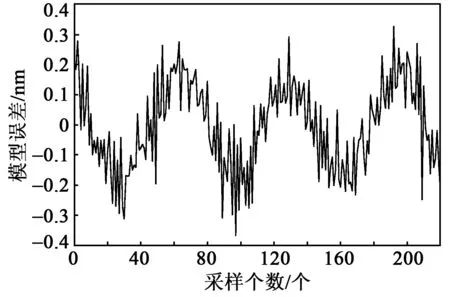
图6 f=50 Hz时实际模型误差曲线
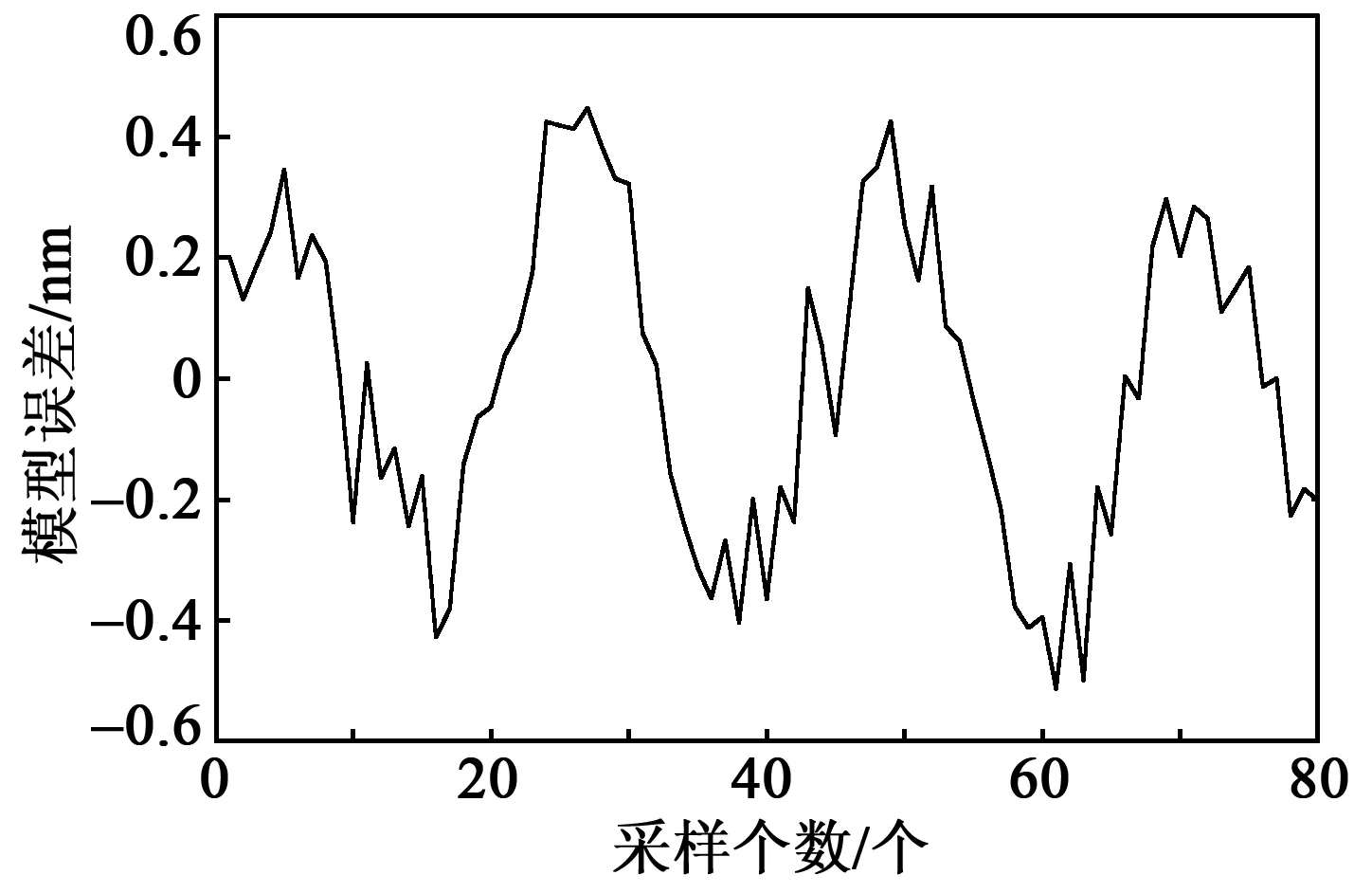
图7 f=100 Hz时实际模型误差曲线
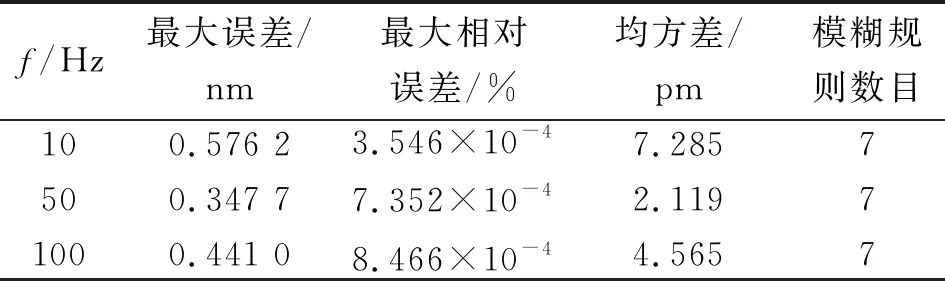
表1 不同输入频率下的模型误差
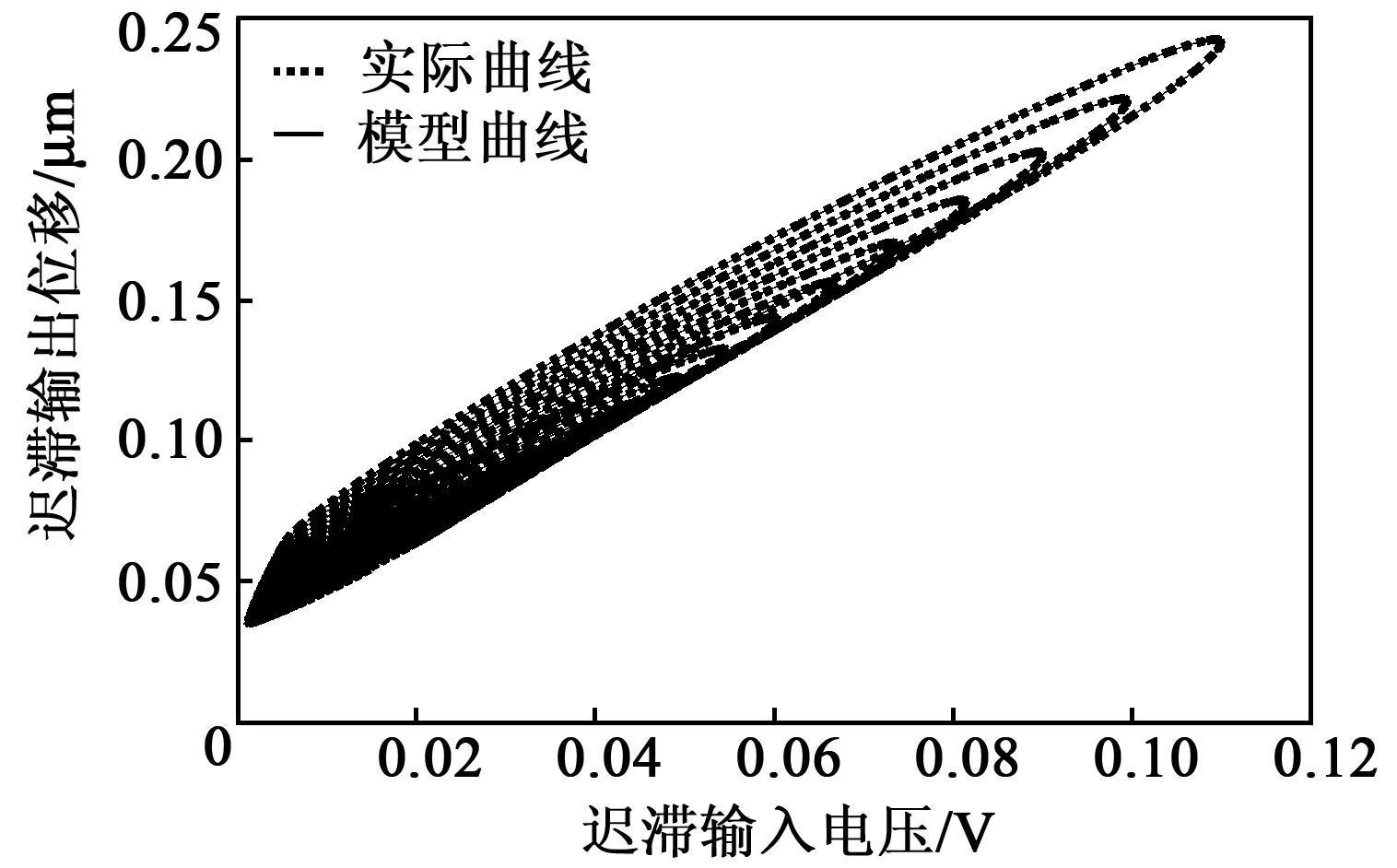
图8 实际输出与模型输出曲线
为了验证该模型的辨识精度,选择超球面型隶属度函数的建模方案作为对比。在正弦衰减输入信号作用下,均采用三输入-单输出的模型结构,将本文模型与文献[10]中的建模方案进行比较。输出曲线及误差曲线对比分别如图8、9所示。模型对比如表2所示。
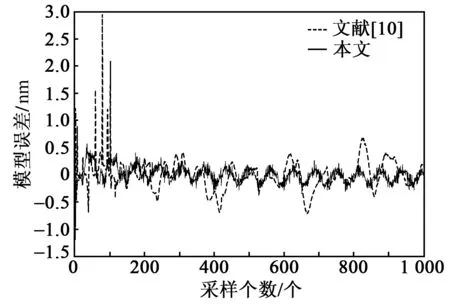
图9 本文与文献[10]建模误差对比
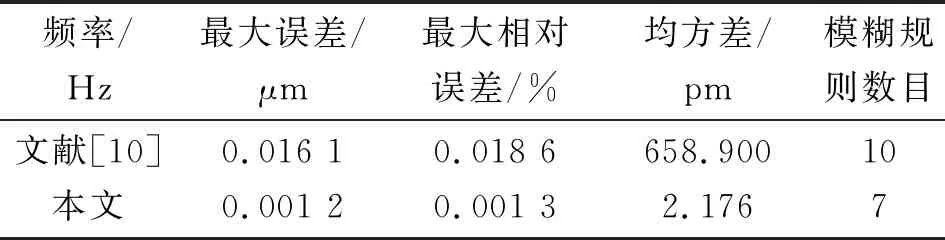
表2 本文与文献[10]模型参数对比
3 结束语
本文建立了压电驱动器迟滞特性的区间二型T-S模糊模型。引用垂直距离公式替代了传统的误差公式,提出了改进的区间二型FCRM聚类算法用于模型的结构辨识,并引入了与该超平面型聚类算法结构相匹配的超平面隶属度函数,提高了建模精度。实验结果表明,该建模方案可以有效地辨识压电驱动器的迟滞特性。
