基于RecurDyn的2K-V型减速机回差仿真研究
2021-01-05韩林山魏征温泉王大兵
韩林山,魏征,温泉,王大兵
基于RecurDyn的2K-V型减速机回差仿真研究
韩林山,魏征,温泉,王大兵
(华北水利水电大学 机械学院,河南 郑州 450045)
通过SolidWorks软件对2K-V型减速机进行三维实体建模,利用RecurDyn软件进行多体动力学的回差分析。以2K-V110E型减速机为例,基于高精度测量仪对其进行实体数据的测绘,建立含有偏差上下限的针齿半径、曲柄轴偏心距、轴承游隙等误差的虚拟样机与依据图纸绘制的虚拟样机进行对比分析,验证了所建立的回差虚拟样机模型的正确性。
2K-V型减速机;回差;高精度测量仪;虚拟样机
前言
2K-V型减速机是一种新型传动机构,它采用了渐开线齿轮和摆线针轮复合传动的行星传动形式,具有传动比大、结构紧凑、传动平稳、传动精度高、使用寿命长等优点,因此被广泛应用于工业机器人中。回差是指输入轴反转时,输出轴在运动时滞后于输入轴的滞后量。对于2K-V型减速机来说,回差体现减速机设计精度以及传动误差的关键性因素,它主要分为三方面:因加工及装配引起的几何回差,因扭转刚度及弹性变形引起的刚度误差、因减速机转速导致温升而引起的温度回差。本文主要针对2K-V型减速机的几何回差进行仿真研究,通过对实际测得的几何数据进行三维实体建模,利用RecurDyn软件完成虚拟样机回差仿真分析,验证了所建立的回差虚拟样机模型的正确性,为后续2K-V型减速机误差的研究奠定了基础。
1 2K-V型减速机传动原理
2K-V型减速机整体结构较复杂,为了更加直观的表述其传动原理,可将其简化为如图1所示,主要零部件有行星轮、摆线轮、行星架、太阳轮、曲柄轴、针齿壳,该减速机是二级行星减速机构,其中标准直齿轮啮合机构为第一级减速机构,少齿差摆线针轮啮合机构为第二级减速机构。

图1 2K-V型减速机机构简图
2 回差仿真流程及方案确定
本文采用RecurDyn多体动力学仿真软件进行2K-V型减速机回差仿真计算,并制定回差仿真方案。首先将2K-V型减速机零件各项误差等效处理,利用SolidWorks三维建模软件建立含有误差项虚拟样机1与虚拟样机2模型,设置零件质量属性,添加约束、电机、接触及扭矩,最后导入RecurDyn软件进行2K-V型减速机回差仿真,仿真流程图如图2所示。

图2 基于RecurDyn回差仿真的流程图
根据回差的定义,在仿真过程中设置RecurDyn模型实现不断正反转,为了实现输入轴不断正反转且正转角度大于反转角度,同时考虑换向平稳,在输入轴添加转速为=sin()+形式的正弦函数,其计算公式如公式(1)所示,对输出轴进行n次回差进行测试。

式中:
φ——第次测试的回差值(′);
t——输入轴第次换向的时间(s);
t——输出轴第次换向的时间(s);
θt——输入轴t时刻的转角(°);
θt——输出轴t时刻的转角(°)。
3 仿真模型的建立
以2K-V110E型减速机为例,根据高精度测量仪测绘数据进行三维实体建模,通过分析灵敏度,取其主要误差项的偏差上限及偏差下限,如表(1)样机误差参数,设置误差参数,从而建立有误差项的虚拟样机1和虚拟样机2。
在对2K-V110E型减速机进行三维实体的建模过程中需要特别注意摆线轮模型的建立,由于摆线轮渐开线的形成比较复杂,一般采用方程驱动方式来建立齿廓曲线,如公式(2)所示,该方法能够方便调节摆线轮各个误差的参数。
表1 虚拟样机误差参数


式中:
r——针齿分布圆半径(mm);
r——针齿半径(mm);
i——摆线轮针齿间的相对传动比;
1——短幅系数;
——啮合相位角(°);
——偏心距(mm)。
其余零件按照测绘数据依次进行三维实体建模,在建模过程中省去倒角、螺栓、轴承、孔等不会对整体运动造成影响的细节,根据零件配合关系完成装配体配合。完成后的装配体模型如图(3)所示。在导入RecurDyn进行回差仿真之前需要对其进行干涉检验,保证后续仿真计算的准确性。

图3 装配体模型
4 基于RecurDyn回差仿真计算
4.1 RecurDyn的模型导入
(1)RecurDyn初始条件的设置
设置模型名称、单位以及重力方向,采用国际单位制MMKS(毫米、千克、牛顿、秒),将建立的2K-V110E型减速机装配体保存为Parasolid(*.x_t)格式导入RecurDyn中,修改该模型的质量及材料属性。
(2)建立约束
将装配体导入RecurDyn后,根据 2K-V型减速机装配体结构特点添加约束,约束的添加类型如表2所示。
表2 设置约束副表

4.2 驱动设置
输入轴驱动转速采用=1100d*sin(45*time)+600d正弦函数,而负载转矩按照额定转矩的3%设置,设置大小为33N·m,仿真时间设置为1s,进行多体动力学仿真。
4.3 仿真结果
利用RecurDyn对2K-V110E型减速机装配体模型几何回差进行多体动力学仿真,得到输入轴、输出轴转速及转角仿真结果,后处理得到输入轴(太阳轮)转角和转速曲线,输出轴(法兰盘)转角和转速曲线,如图4~图7所示。

图4 输入轴转角

图5 输入轴转速

图6 输出轴转角

图7 输出轴转速
通过RecurDyn对样机1和样机2进行多体动力学回差仿真分析得到回差分析数据,观测输入输出25次换向时间和对应时刻输入轴转角值,利用公式(1)计算其回差值大小,对计算结果进行数据拟合得到图8所示仿真曲线。
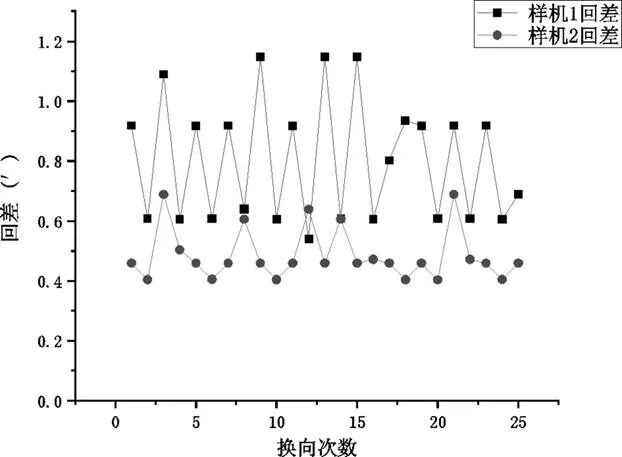
图8 回差仿真结果拟合曲线
由图8可知,样机1和样机2回差成周期上下波动,这是由于摆线轮齿圈径向圆跳动引起的,仿真得出的减速器回差为0.4044′~1.1478′,理论计算回差设计值为0.3764′~ 1.4370′,通过对比仿真分析结果与设计结果可知仿真结果在设计结果误差允许范围之内,验证了多体动力学仿真模型的正确性。
5 结论
利用SolidWorks与RecurDyn两款软件的联合仿真,建立了2K-V110E型减速机系统动力学模型,实现了二级行星齿轮系统的动力学回差仿真,得到了输入轴和输出轴的转角速度以及转速,通过计算得到回差仿真拟合曲线,将仿真所得数据与理论计算结果进行对比,在设计范围之内,说明仿真模型的几何回差技术研究的可行性,为后续动力学以及误差仿真研究奠定了基础。
[1] 何卫东,李欣,李力行.机器人用高精度RV传动中摆线轮修形对回差影响的研究[J].机械传动.1999.23(1):24-25.
[2] 张东生,关天民.针摆传动齿形优化与动态回程误差分析[J].机械传动.2007,31(2):69-71.
[3] 段钦华.2K-V型行星传动的原理分析[J].煤矿机械,2006(12):68- 70.
[4] 常安全,张迎辉,何卫东,王晓雨.基于多体动力学仿真的RV减速器角传动误差虚拟样机的建立[J].机械传动,2018,42(09):168-172.
[5] 张春亮,李充宁,戚厚军.基于Pro/E和ADAMS的2K-V型减速机的运动学仿真[J].机械传动,2008,32(3):43-45.
Simulation study of 2K-V reducer reversal rased on RecurDyn
Han Linshan, Wei Zheng, Wen Quan, Wang Dabing
(College of Mechanical,North China University of Water Resources and Electric Power, Henan Zhengzhou 450045)
The 3D solid modeling of the 2K-V reducer is carried out by SolidWorks software, and the backlash analysis of multi-body dynamics is carried out by RecurDyn software. Taking the 2K-V110E reducer as an example, based on the high-precision measuring instrument, the physical data is surveyed and mapped, and the virtual prototype of the pin tooth radius with the upper and lower limits of the deviation, the crankshaft eccentricity, the bearing clearance and other errors is established. According to the drawings, the contrastive analysis between these two virtual prototypes has verified the correctness of the established virtual prototype model.
2K-V reducer; Backlash; High precision measuring instrument; Virtual prototype
A
1671-7988(2020)24-117-03
U467
A
1671-7988(2020)24-117-03
韩林山(1964-),教授,博士,就职于华北水利水电大学机械学院,研究方向:机械设计及理论。
10.16638/j.cnki.1671-7988.2020.24.039
CLC NO.: U467
