植保无人飞机喷施作业的雾滴信息采集方法研究
2021-01-04杜睿方治豪韩小强窦泽晨付威
杜睿 方治豪 韩小强 窦泽晨 付威


摘要 :农药雾滴信息是评价农药施用质量的主要指标,农药雾滴采集器的设置对于获取雾滴信息有较大的影响。针对如何科学地设置农药雾滴采集器从而准确地获取真实雾滴信息等问题,本文以油动单旋翼植保無人飞机和电动六旋翼植保无人飞机为供试药械,以诱惑红为雾滴示踪剂,采用将卡罗米特纸卡直接固定在棉花叶片上和使用金属杆固定2种方法采集雾滴信息,研究2种方法下采集的雾滴信息的差异。结果表明,油动单旋翼植保无人飞机作业,在添加助剂情况下,金属杆固定法在棉花冠层上、中、下层采集的雾滴体积中径分别为(435.4±66.1)(434.6±68.3)μm和(398.9±66.7)μm显著大于植株固定法在相应部位采集的雾滴体积中径(361.2±93.1)(351.9±95.7)μm和(338.1±71.1)μm;金属杆固定法采集的雾滴密度在棉花冠层上层为(29.9±13.6)个/cm2,中层为(13.4±4.5)个/cm2,下层为(6.7±4.2)个/cm2,显著大于植株固定法在相应冠层采集的雾滴密度(12.9±5.0)(8.6±3.4)个/cm2和(1.9±1.3)个/cm2。添加助剂能够提升两种植保无人飞机喷施作业的雾滴覆盖率和雾滴的沉积量,提高农药的利用率。
关键词 :植保无人飞机; 雾滴信息; 采集方法
中图分类号:
S 252.3
文献标识码: A
DOI: 10.16688/j.zwbh.2020464
The methods for droplet information collection in plant-protection unmanned aerial vehicle spraying
DU Rui1, FANG Zhihao1, HAN Xiaoqiang1*, DOU Zechen1, FU Wei2
(1.College of Agriculture, Key Laboratory of Oasis Agricultural Pest Management and Plant Protection Resources
Utilization, Xinjiang Uygur Autonomous Region, Shihezi University, Shihezi 832003, China;
2.College of Mechanical and Electrical Engineering, Hainan University, Haikou 570228, China)
Abstract
Droplet information is the main index for evaluating the quality of pesticide application, and the setting of pesticide droplet collector has a great influence on the droplet information. Plant-protection UAV is characterized by high efficiency, safe operation and strong applicability, which has developed rapidly in recent years and has become one of the main prevention and control methods for pests and diseases. However, there still are some problems during the droplet information collection, such as how to scientifically set up the droplet collector to accurately obtain the real droplet information. In this study, single rotor fuel-powered unmanned aerial vehicle and six rotor electric unmanned aerial vehicle were used as the test equipment, allure red was used as the droplet tracer, and two methods (Kromekote card directly fixed on cotton leaves or fixed by metal rod) were used to collect the droplet information. The difference in the droplet information collected by using the two methods was studied. The results showed that with the addition of adjuvants, the volume median diameter of droplets collected by metal rod fixation method on the upper, middle and lower layers of cotton canopy were (435.4 ± 66.1)μm, (434.6 ± 68.3)μm and (398.9 ± 66.7)μm, respectively, in the operation of single rotor fuel-powered unmanned aerial vehicle, which were significantly higher than those collected by plant fixation method [(361.2±93.1)μm, (351.9±95.7)μm and (338.1±71.1)μm]. With the addition of adjuvants, the droplet densities collected by the metal rod fixation method on the upper, middle and lower layers of cotton canopy were (29.9±13.6), (13.4±4.5)pcs/cm2 and (6.7±4.2)pcs/cm2, respectively, which were significantly higher than those by the plant fixation method [(12.9±5.0), (8.6±3.4)pcs/cm2 and (1.9±1.3)pcs/cm2]. The addition of adjuvants can improve the droplet coverage and droplet deposition during the operation of two UAVs and improve the utilization rate of pesticides.
Key words
plant protection UAV; droplet information; collection method
农业航空是现代农业的重要组成部分,也是反映农业现代化的重要标志之一[13]。近年来,我国农业航空产业发展迅速,特别是植保无人飞机,其不仅在水稻、小麦、玉米、棉花等主要作物上得到了广泛的应用,还在柑橘、橡胶、槟榔等高大植株的病虫害防治中占据重要地位[46]。植保无人飞机施药作业与人工施药和地面机械施药作业相比,具有效率高、成本低、农药利用率高的特点,可有效解决高秆作物、水田和丘陵山地等作业环境人工和地面机械作业困难、劳动力不足和作业人员安全等问题[79]。
植保无人飞机喷施作业雾滴沉积、流失、飘移对于农药药效的发挥以及农药对环境的影响具有重要的作用[1011]。其中雾滴流失、飘移是农药进入环境的主要途径[12]。农药沉积、流失的测定对于施药参数的优化、施药器械的改进具有重要的作用[13]。然而,目前对于植保无人飞机作业过程中雾滴沉积、飘移相关的研究较多,但是对雾滴信息采样器或者采样方法的研究较少。
雾滴信息采集卡是一种用于田间喷雾作业过程中收集雾滴信息的重要工具。雾滴信息采集器种类较多,均具有较高的雾滴收集效率、一定的承载性、不易饱和、回收率高、稳定性强、能进行定量分析、在田间条件下易于处理、价格便宜、安全性高等特点[14]。纸卡类的采样器如水敏纸(water sensitive paper)[15]、卡罗米特纸卡(Kromekote card)、滤纸(filer paper)、铜版纸等是当前最为常用的雾滴采集器。水敏纸是运用比较广泛的一种,当雾滴接触水敏纸黄色表面时,水敏纸由黄色变为蓝色,借助软件扫描后即可获得雾滴信息[16]。另一种广泛使用的雾滴收集卡是卡罗米特纸卡,通过在药液中添加彩色颜料作为示踪剂(诱惑红等)采集雾滴信息,雾滴信息获取方法与水敏纸相同[17]。Mylar聚酯薄片、滤纸等由于无法成像读取雾滴信息,主要用于雾滴沉积和飘移的定量研究[1819]。
邱白晶等以胭脂红为雾滴指示剂,通过采样支架固定采样皿(d=9 cm)的方法分析了小麦田植保无人飞机飞行参数与雾滴沉积分布的关系[20]。Wang等将水敏纸固定在金属杆上,研究了植保无人飞机喷施作业在小麦田的雾滴沉积情况[2122]。陈盛德等和Zhang等采用金属杆固定水敏纸的方法测定了小麦田植保无人飞机作业雾滴沉积量和有效喷幅[2324]。秦维彩等以荧光染料Rhodamine-B为指示剂,将圆形聚酯卡(d=9 cm)直接固定在玉米植株上,研究了植保无人飞机喷施作业对玉米冠层雾滴沉积分布的影响[25]。Qin等将水敏纸直接固定在水稻叶片上,研究了植保无人飞机喷雾在水稻上的雾滴沉积状况及对稻飞虱防效的影响[26]。陈盛德等将白纸卡片通过金属杆固定,研究了植保无人飞机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[27]。最近,Chen等以诱惑红为雾滴指示剂,通过金属杆固定卡罗米特纸卡,研究了喷头类型和施药时期对四旋翼植保无人飞机喷施作业雾滴沉积及对稻飞虱的防效[28]。在对果树喷施农药的雾滴沉积
研究中,由于树体高大,一般使用回形针将雾滴采集卡卡在叶片上,用于测定叶片表面雾滴沉积量和覆盖率[2931]。
雾滴采集器的设置对于采集到的雾滴信息有何影响,如何科学地设置雾滴采集器从而准确地获取真实雾滴信息还有待研究。为解决上述问题,本文以2种植保无人飞机为供试药械,以诱惑红为雾滴示踪剂,采用将卡罗米特纸卡直接固定在棉花叶片和使用金属杆固定2种方法进行雾滴信息采集,通过对不同方法采集的雾滴信息分析,研究2种方法下采集的雾滴信息的差异,并进一步探究了喷雾助剂对其的影响,以期为农药雾滴信息的准确获取提供理论参考。
1 材料与方法
1.1 材料与设备
1.1.1 供试植保无人飞机
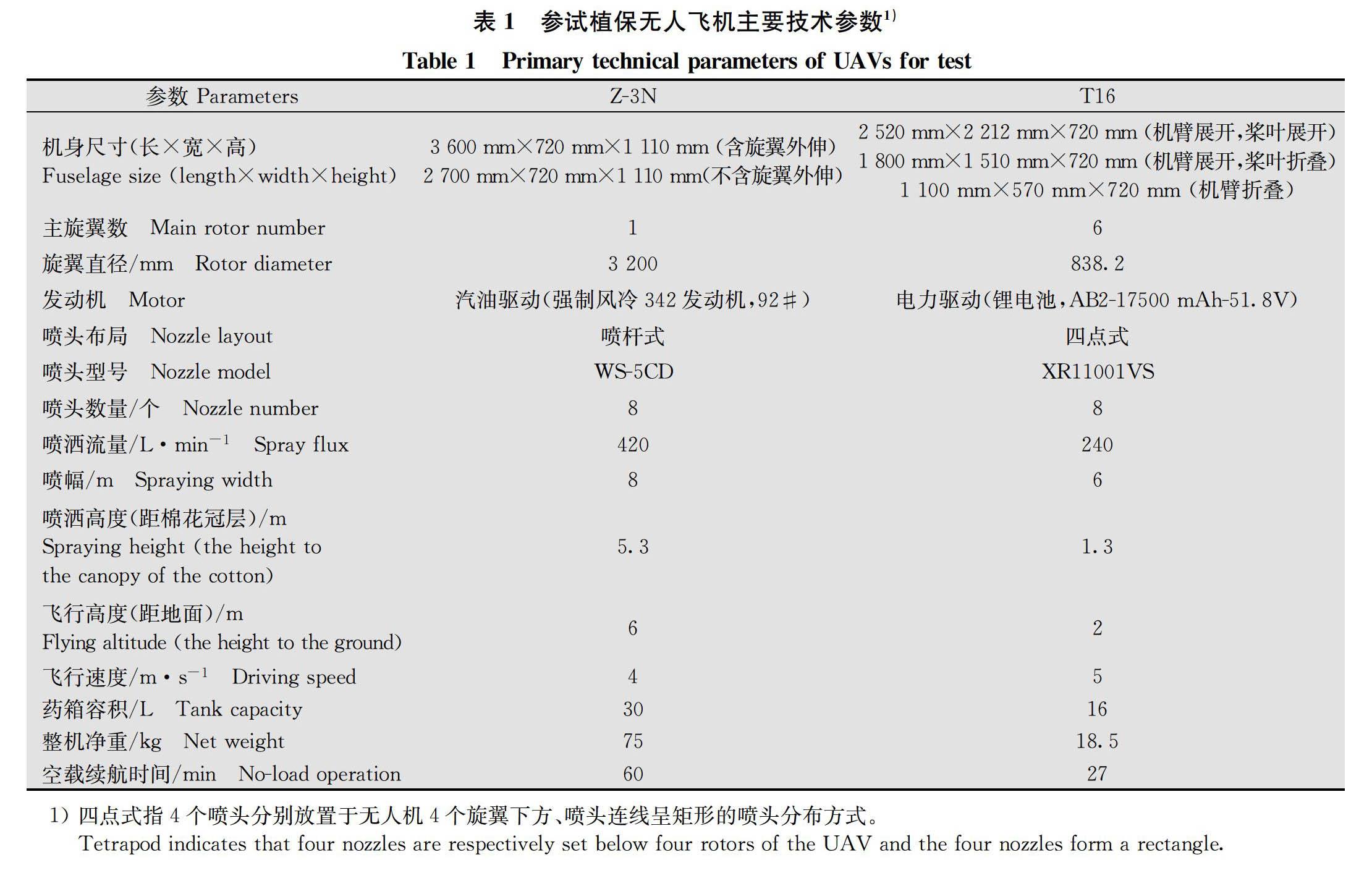
供试植保无人飞机为當前国内具有代表性的机型,分别为:深圳市大疆创新科技有限公司生产的T16电动六旋翼植保无人飞机和山西学云科技有限公司生产的Z-3N油动单旋翼植保无人飞机,表1为2种植保无人飞机的主要参数。
1.1.2 试验仪器与材料
BSA124S分析天平,赛多利斯科学仪器(北京)有限公司;手持气象站NK5500,美国尼尔森凯勒曼公司;FileScan2500扫描仪,上海中晶科技有限公司;AK-RO-200 超纯水机,成都唐氏康宁科技发展有限公司;Eppendorf 5417R离心机,德国艾本德股份公司;Infinite 200Pro酶标仪,瑞士Tecan公司。1.2 m长金属杆、卡罗米特纸卡(30 mm×80 mm),石河子大学农学院;万向夹,苍南宏均商贸有限公司;滤纸(d=70 mm),通用电气生物科技(杭州)有限公司。
1.1.3 供试药剂
45%吡虫啉可溶液剂(SL),海南正业中农高科股份有限公司;25%吡蚜酮悬浮剂(SC),吉林省八达农药有限公司;倍达通助剂,河北明顺农业科技有限公司;诱惑红,浙江吉高得色素有限公司。
1.2 试验方法
1.2.1 试验地概况
试验田设于新疆生产建设兵团第八师一三四团十三连(44°45′43″E, 85°22′21″N)。已连续多年种植棉花,试验田采用中等水平施肥。供试棉花品种为‘新陆早21号’,采用标准机采棉种植模式,一膜6行,行距(60+10)cm,宽窄行常规播种模式;2019年4月18日播种,种植密度为10 000株/667m2,全生育期采用膜下滴灌。
1.2.2 试验设计
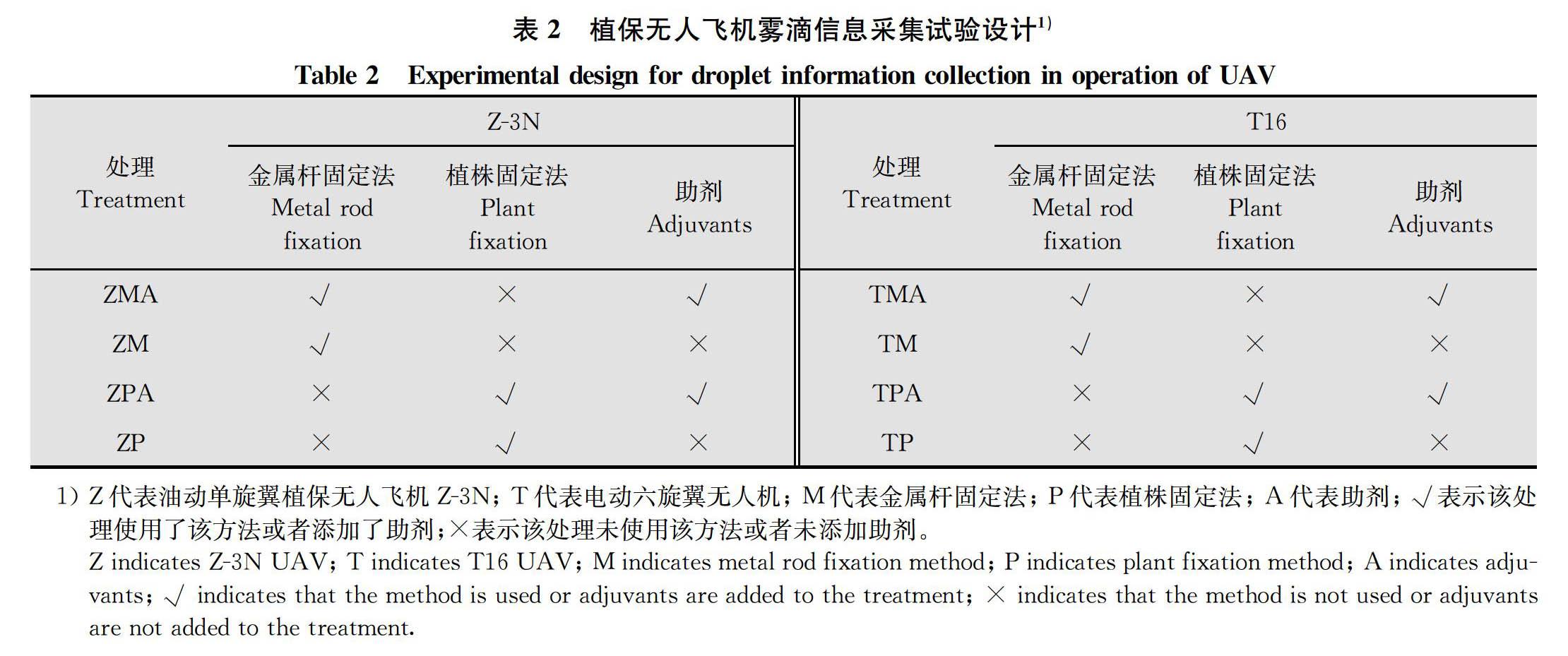
为了研究不同采集方法对获取雾滴信息的影响,以诱惑红为雾滴示踪剂,采用卡罗米特纸卡采集雾滴信息,通过滤纸获取雾滴沉积量。试验设计见表2,T16电动六旋翼植保无人飞机和Z-3N油动单旋翼植保无人飞机
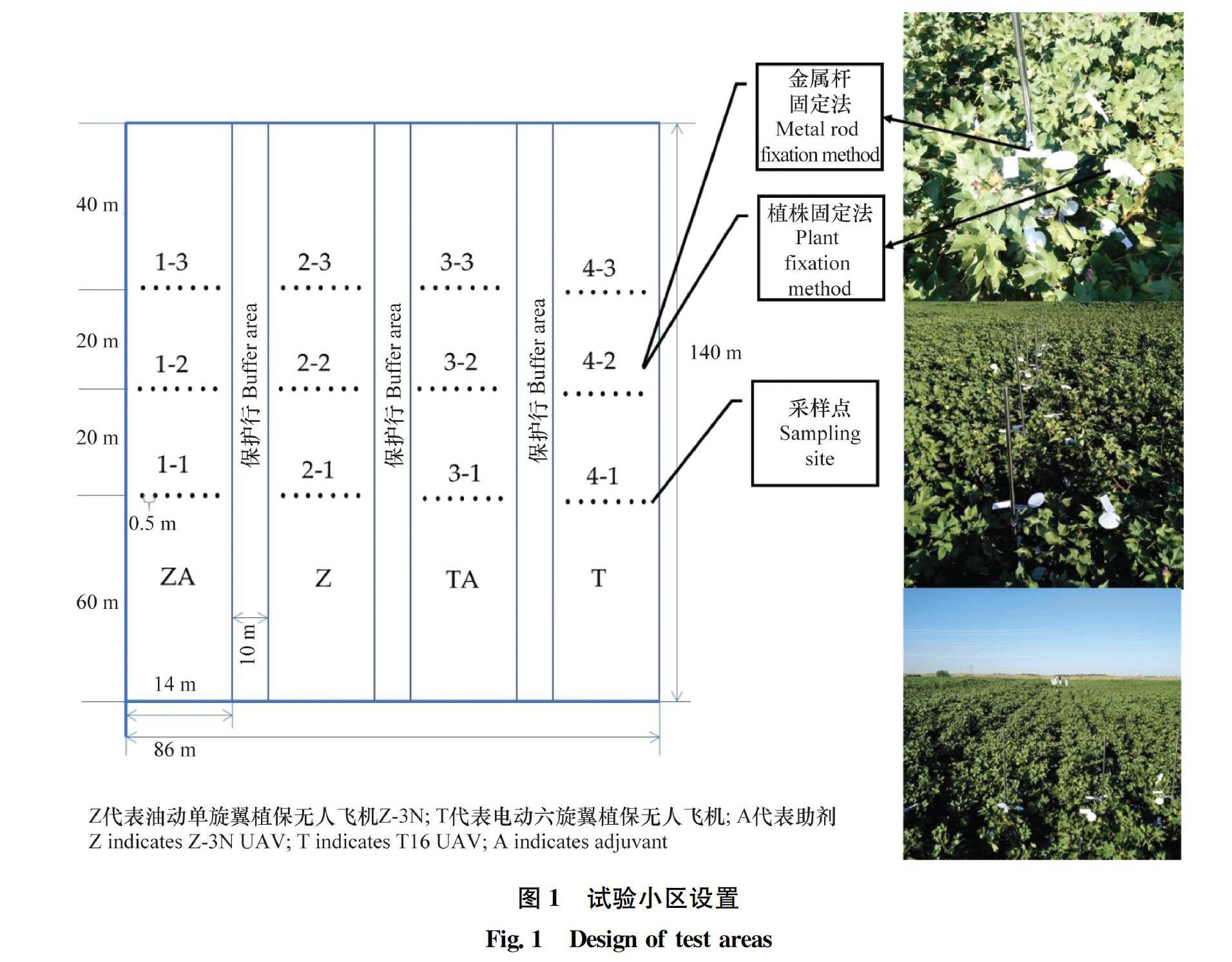
各设4个处理,分别为添加飞防助剂并使用金属杆固定卡罗米特纸卡采集雾滴信息、不添加飞防助剂并使用金属杆固定卡罗米特纸卡采集雾滴信息、添加飞防助剂并使用植株固定卡罗米特纸卡采集雾滴信息、不添加飞防助剂并使用植株固定卡罗米特纸卡采集雾滴信息。每处理喷雾1次,每间隔20 m采集雾滴信息1次,重复3次(图1)。
各处理农药的施药量为:20%吡虫啉可溶液剂30 g/667m2、25%吡蚜酮SC 30 g/667m2、诱惑红20 g/667m2。将两种药剂和雾滴示踪剂按二次稀释法配制成混合药液。添加助剂的处理组,倍达通助剂的用量为100 mL/667m2。
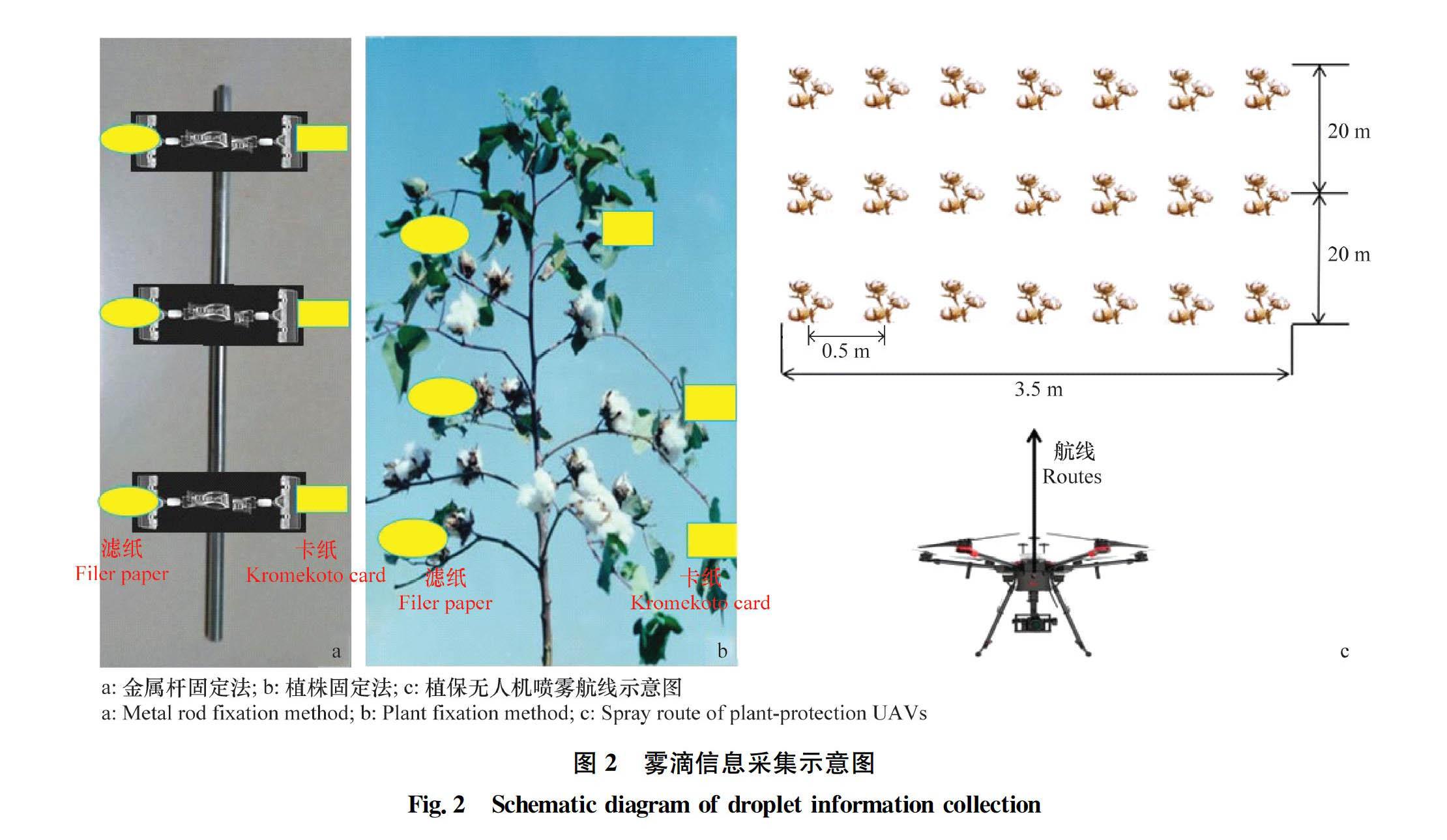
金属杆固定法:喷雾开始前,在距起飞处60、80、100 m设3条平行雾滴采集带,植保无人飞机航线垂直于采集带并居中。每条采集带在喷幅范围内从左至右依次布置7个采集点,在每个采集点处插1根1.2 m长的金属杆,将卡罗米特纸卡和滤纸分别通过万向夹固定到金属杆上、中、下3个不同部位,分别距地面10、50、80 cm,测定棉花不同位置的雾滴密度及雾滴沉积量(图2)。
植株固定法:在金属杆固定法的植株旁边,选取1株棉花,将卡罗米特纸卡和滤纸分别用订书机固定到植株的上部、中部、下部的叶片上(图2),其余信息与金属杆固定法一致。
每次喷雾结束后,待卡罗米特纸卡(卡纸)和滤纸表面的雾滴稍微干燥,试验人员立即戴乳胶手套收集各布样点的卡纸和滤纸,用记号笔按照“处理组—重复—分层—编号”标记后,将卡纸装于信封内,滤纸装于自封袋内,带回实验室测定。
1.2.3 雾滴沉积分布测定
对收集的卡罗米特纸卡用FileScan2500扫描仪进行扫描,灰度参数设定为600 dpi。使用Image J 1.38X软件(美国国立卫生研究院)分析每张卡纸上药液的雾滴密度(个/cm2)、雾滴覆盖率(%)和雾滴体积中径(μm)。
1.2.4 雾滴沉积量测定
向每个装有滤纸的自封袋中加人5 mL蒸馏水,振荡洗涤10 min,取洗脱液于2 mL离心管中,4 000 r/min,5 min离心去除杂质。用Infinite 200Pro酶标仪于波长510 nm处测定各浓度诱惑红
标准溶液的吸光度,得到Yi,并根据标准溶液线性回归方程将洗脱液的吸光度转化为质量浓度Xi。再根据公式Yi=Xi×V/S,计算单位面积的沉积量。Yi为单位面积雾滴沉积量,Xi为洗脱液的质量浓度,V为加入洗脱液的体积,S为滤纸面积。
诱惑红标准曲线制作:使用万分之一分析天平准确称取诱惑红0.1 g后转移至100 mL容量瓶,蒸馏水定容,得到1 000 mg/L诱惑红母液,再用蒸馏水稀释为0.1、0.2、0.5、1.0、2.0、5.0 mg/L诱惑红标准溶液备用;使用Infinite 200 PRO 型酶标仪于λ=510 nm处检测其吸光度,构建诱惑红浓度吸光度标准曲线(图3),测得线性方程为y=0.238x+0.043 1,R2=0.997。
1.3 数据处理
以农药雾滴体积中径、雾滴密度、雾滴覆盖率和雾滴沉积量等为评价指标,综合作业质量进行分析。所有数据采用Origin 9.1 和Excel 2016统计软件将各试验结果按照不同处理进行分组,采用One-way ANOVA(单因素方差分析)方法分析各处理数据,将置信区间设置为95%,当P<0.05 时,表示两组间存在显著性差异。
2 结果与分析
2.1 采集方法对农药雾滴体积中径的影响
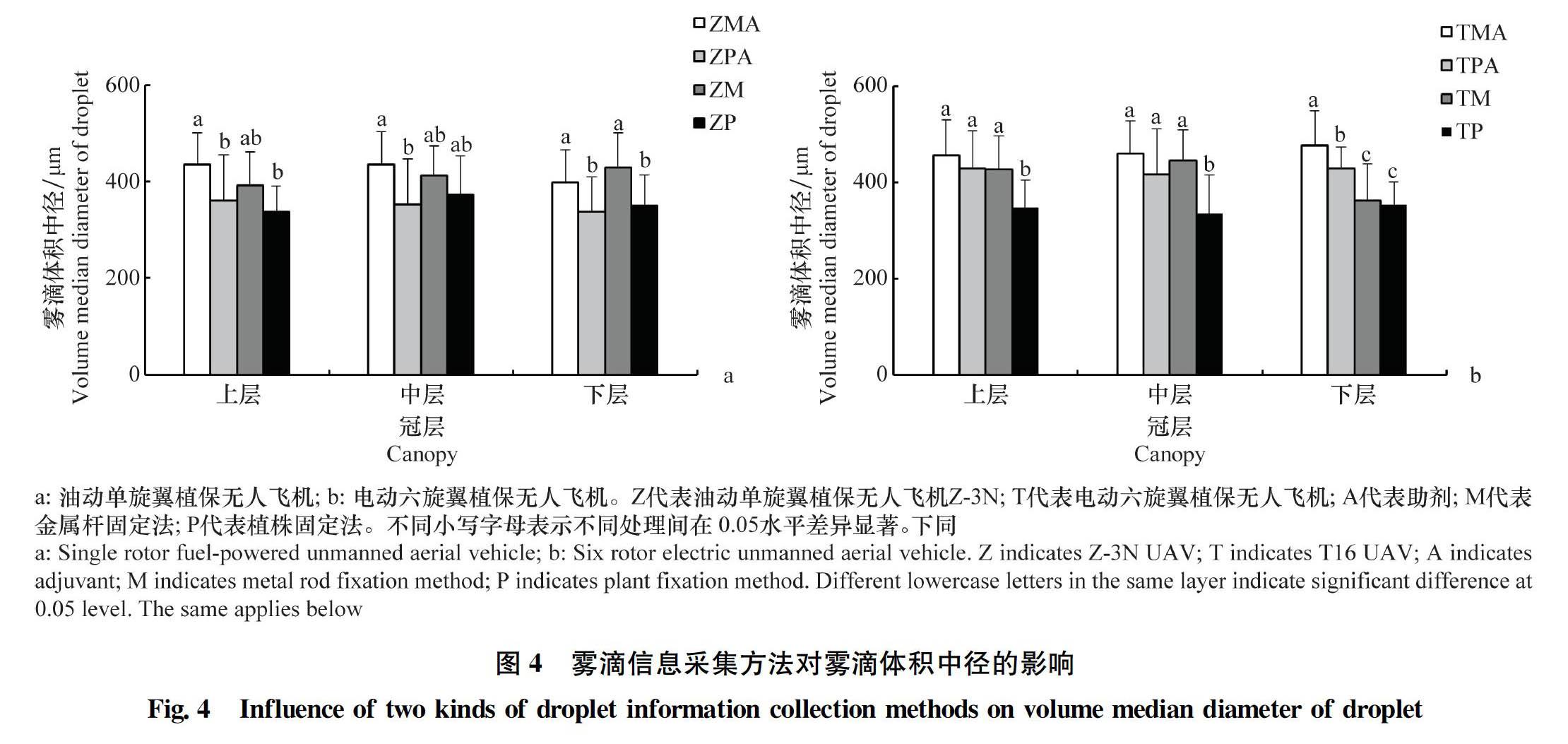
卡罗米特纸卡直接固定在棉花叶片上和使用金属杆固定2种雾滴信息采集方法对雾滴体积中径的影响如图4所示。油动单旋翼植保无人飞机在添加助剂的情况下,金属杆固定法在冠层的上、中、下层采集的雾滴体积中径分别为(435.4±66.1)、(434.6±68.3)、(398.9±66.7)μm,显著大于植株固定法在相应冠层采集的雾滴体积中径(361.2±93.1)、(351.9±95.7)、(338.1±71.1)μm。未添加助剂情况下,金属杆固定法采集的雾滴体积中径略大于植株固定法,但差异不显著。同一种固定法下添加助剂处理与未添加助剂处理差异不显著。
电动六旋翼植保无人飞机在添加助剂情况下,金属杆固定法采集的雾滴体积中径略大于植株固定法,但仅下层二者差异显著。未添加助剂情况下,金属杆固定法采集的雾滴体积中径在上、中层显著大于植株固定法,但在下层二者差异不显著。金属杆固定法下添加助剂处理的雾滴体积中径在上、中层略大于未添加助剂处理,但差异不显著,下层二者差异显著。植株固定法添加助剂处理在上、中、下层的雾滴体积中径分别为(427.7±78.0)、(415.9±95.7)、(427.7±45.5)μm,显著大于未添加助剂处理在相应冠层的雾滴体积中径(346.7±58.8)、(446.2±61.6)、(361.9±76.3)μm。结果表明,添加飞防助剂能够影响雾滴的体积中径,降低蒸发对雾滴的影响,促進雾滴的沉降,有利于减少雾滴飘移。
2.2 采集方法对雾滴密度的影响
2种雾滴信息采集方法对植保无人飞机喷施作业雾滴密度的影响如图5所示。油动单旋翼植保无人飞机喷施作业后,在添加喷雾助剂的情况下,金属杆固定法采集的雾滴密度在棉花冠层上层为(29.9±13.6)个/cm2,中层为(13.4±4.5)个/cm2,下层为(6.7±4.2)个/cm2,均显著大于植株固定法在相应冠层上采集的雾滴密度(12.9±5.0)、(8.6±3.4)个/cm2和(1.9±1.3)个/cm2。不添加助剂情况下,金属杆固定法在各冠层采集的雾滴密度略大于植株固定法,其中中层二者差异显著。添加助剂对雾滴密度有较大的影响。金属杆固定法添加助剂处理采集的雾滴密度显著大于未添加助剂处理,植株固定法下添加助剂处理的雾滴密度大于未添加助剂处理,其中在棉花中层二者差异显著。这表明,添加飞防助剂能够有效增加雾滴的密度,对于提升农药防效有重要作用。
电动六旋翼植保无人飞机在添加助剂情况下,金属杆固定法在各冠层采集的雾滴密度略小于植株固定法。未添加助剂情况下,金属杆固定法在上、中层采集的雾滴密度分别为(33.7±11.5)个/cm2和(18.6±7.3)个/cm2,显著大于植株固定法的(20.6±8.9)、(11.7±5.1)个/cm2;但下层雾滴密度(6.7±4.2)个/cm2显著小于植株固定法的(9.8±4.8)个/cm2。植株固定法添加助剂处理与未添加助剂处理采集的雾滴密度在上、中冠层差异不显著,下层未添加助剂处理的雾滴密度(9.8±4.8)个/cm2显著大于添加助剂处理的雾滴密度(5.8±3.2)个/cm2。
2.3 采集方法对雾滴覆盖率的影响
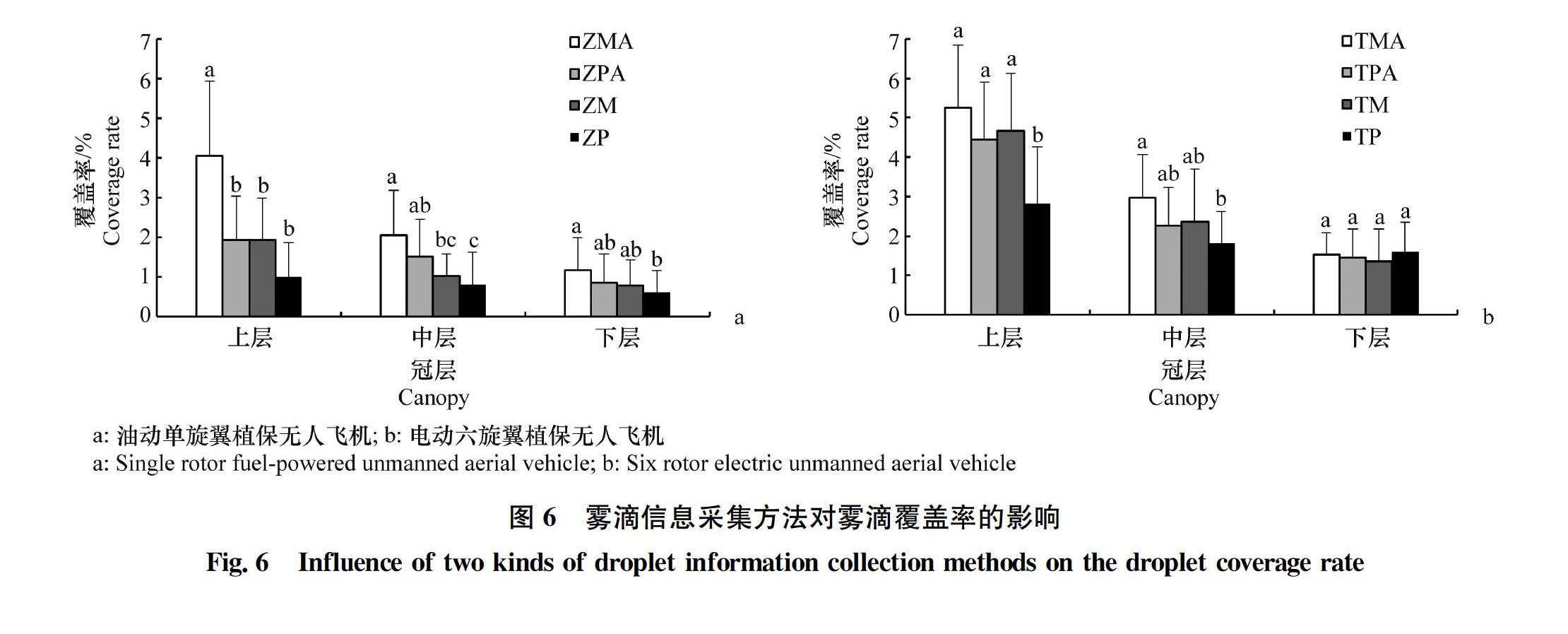
雾滴信息采集方法对雾滴覆盖率的影响如图6所示。油动单旋翼植保无人飞机在添加助剂情况下,金属杆固定法采集的雾滴覆盖率大于植株固定法,但仅在上层二者存在显著差异。未添加助剂情况下,金属杆固定法采集的雾滴覆盖率略大于植株固定法。金属杆固定法添加助剂处理采集的雾滴覆盖率在上层和中层分别为(4.1±1.9)%、(2.1±1.1)%,显著大于未添加助剂处理在相应冠层采集的雾滴密度(1.9±1.1)%和(1.0±0.6)%。植株固定法下,添加助剂处理在中层采集的雾滴密度显著大于未添加助剂处理,上、下层二者差异不显著。
电动六旋翼植保无人飞机作业,在添加助剂情况下,金属杆固定法采集的雾滴覆盖率略大于植株固定法。未添加助剂情况下,金属杆固定法采集的雾滴
覆盖率大于植株固定法,但仅在上层二者差异显著。金属杆固定法添加助剂处理采集的雾滴的覆盖率略大于未添加助剂处理。植株固定法添加助剂处理采集的雾滴覆盖率在上、中两层大于未添加助剂处理,但仅在上层差异显著。
2.4 采集方法对雾滴沉积的影响
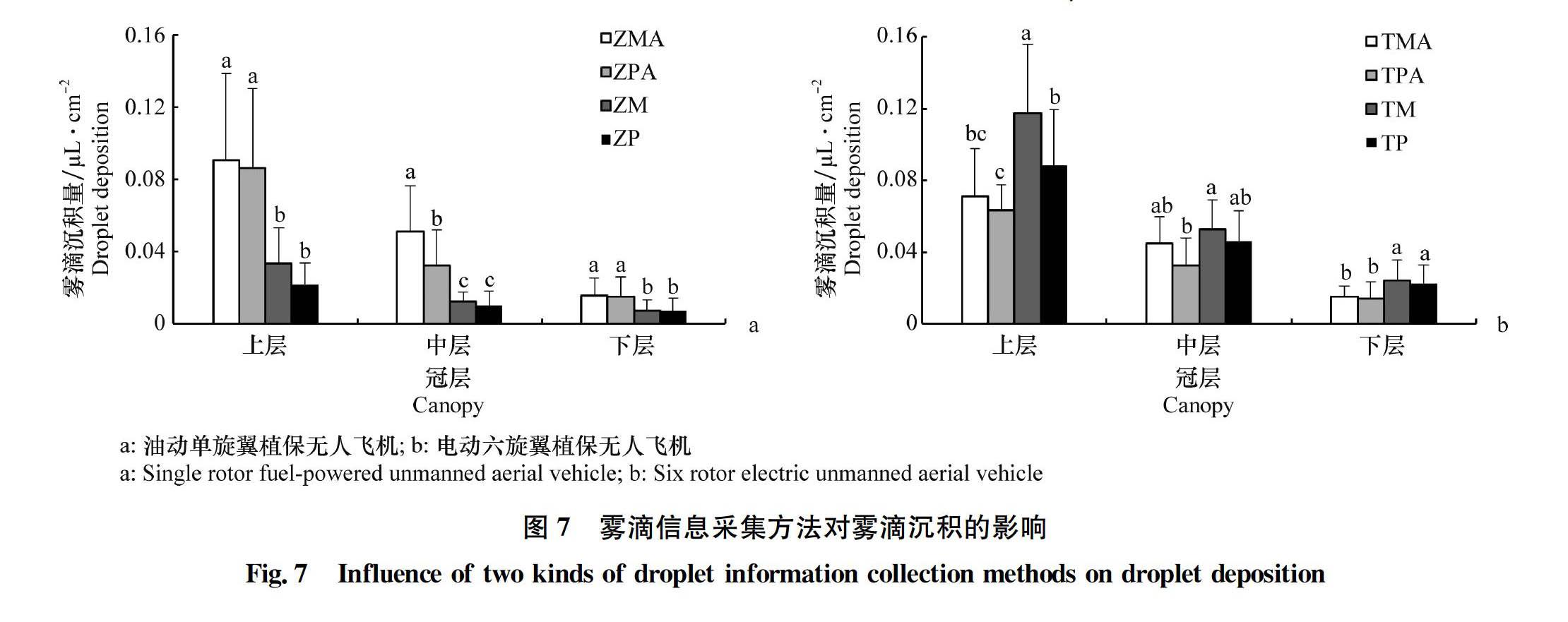
从图7可以看出,油动单旋翼植保无人飞机在添加助剂情况下,金属杆固定法采集的雾滴沉积量大于植株固定法,但仅在中层二者差异显著。未添加助剂情况下,金属杆固定法采集的雾滴沉积量大于植株固定法,但差异不显著。金属固定杆法添加助剂处理的上、中、下层雾滴沉积量分别为(0.09±0.048)、(0.051±0.025)、(0.015±0.010)μL/cm2,显著高于未添加助剂的上、中、下层雾滴沉积量(0.033±0.020)、(0.012±0.005)、(0.007±0.006)μL/cm2,植株固定法添加助剂处理的上、中、下层雾滴沉积量分别为(0.086±0.44)、(0.032±0.019)、(0.015±0.011)μL/cm2,显著高于未添加助剂的上、中、下层雾滴沉积量(0.022±0.012)、(0.010±0.008)、(0.007±0.007)μL/cm2。
电动六旋翼植保无人飞机在添加助剂情况下,金属杆固定法采集的雾滴沉积量略大于植株固定法。未添加助剂情况下,金属杆固定法采集的雾滴沉积量大于植株固定法,但仅在上层差异显著。金属杆固定法添加助剂处理在上、下层的雾滴沉积量分别为(0.071±0.027)μL/cm2和(0.015±0.006)μL/cm2,显著小于未添加助剂处理在相应冠层的雾滴沉积量(0.118±0.038)μL/cm2和(0.024±0.012)μL/cm2。植株固定法添加助剂处理在上、下层的雾滴沉积量分别为(0.063±0.014)μL/cm2和(0.014±0.009)μL/cm2,显著小于未添加助剂处理在相应冠层的雾滴沉积量(0.089±0.031)μL/cm2和(0.023±0.010)μL/cm2。
3 结论与讨论
本文采用T16电动六旋翼植保无人飞机和Z-3N油动单旋翼植保无人飞机喷雾作业,研究了不同雾滴采集方法对获取雾滴信息的影响,主要结论如下:
(1)在添加助剂的情况下,两种植保无人飞机喷雾作业后,金属杆固定法采集的雾滴体积中径均大于植株固定法;未添加助剂时,金属杆固定法采集的两种植保无人飞机喷雾的雾滴体积中径大于植株固定法,且在棉花冠层的上层和中层差异显著。这表明,添加飞防助剂可有效地增大雾滴的体积中径,减少雾滴的飘移和蒸发。
(2)油动单旋翼植保无人飞机喷施作业后,在添加喷雾助剂的情况下,金属杆固定法采集的雾滴密度大于植株固定法;添加助剂处理采集的雾滴密度大于未添加助剂处理。而电动六旋翼植保无人飞机,未添加助剂情况下,金属杆固定法采集的棉花冠层上、中层雾滴密度大于植株固定法;添加助剂反而降低了雾滴的密度。这可能是由于多旋翼植保无人飞机较为复杂的风场造成的[32]。
(3)在添加助剂情况下,两种植保无人飞机喷雾作业后,金属杆固定法采集的雾滴覆盖率大于植株固定法,且在棉花冠层的上层差异显著。添加助剂能够提升两种植保无人飞机喷施作业的雾滴覆盖率。
(4)油动单施翼植保无人飞机喷施作业时添加助剂可有效提高雾滴的沉积量,金属杆法收集的雾滴沉积量要略优于植株固定法。
(5)添加噴雾助剂,能够改善农药的雾滴沉积,减少农药的飘移和蒸发,进而提高农药利用率。
参考文献
[1]LAN Yubin, CHEN Shengde, FRITZ B K. Current status and future trends of precision agricultural aviation technologies [J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 117.
[2] TESKE M E, THISTLE H W. Aerial application model extension into the far field [J]. Biosystems Engineering, 2004, 89(1): 2936.
[3] 周志艳, 臧英, 罗锡文, 等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报, 2013, 29(24): 110.
[4] 袁会珠, 薛新宇, 闫晓静, 等. 植保无人机飞机低空低容量喷雾技术应用与展望[J]. 植物保护, 2018, 44(5):152158.
[5] 郭永旺, 袁会珠, 何雄奎, 等. 我国农业航空植保发展概况与前景分析[J]. 中国植保导刊, 2014, 34(10): 7982.
[6] 兰玉彬, 陈盛德, 邓继忠, 等. 中国植保无人机发展形势及问题分析[J]. 华南农业大学学报, 2019, 40(5): 217225.
[7] 何雄奎. 中国精准施药技术和装备研究现状及发展建议[J]. 智慧农业, 2020, 2(1): 133146.
[8] 兰玉彬,王国宾. 中国植保无人机的行业发展概况和发展前景[J]. 农业工程技术, 2018, 38(9): 1727.
[9] HE X K, JANE B, ANDREAS H, et al. Recent development of unmanned aerial vehicle for plant protection in East Asia [J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 1830.
[10]吕晓兰, 傅锡敏, 宋坚利, 等. 喷雾技术参数对雾滴飘移特性的影响[J]. 农业机械学报, 2011(1): 5963.
[11]顾中言, 徐德进, 徐广春. 论农药雾滴的剂量及分布对害虫防治效果的影响及其与农药损失的关系[J]. 农药学学报, 2020, 22(2): 193204.
[12]曾爱军, 王昌陵, 宋坚利, 等. 风洞环境下喷头及助剂对植保无人飞机喷雾飘移性的影响[J]. 农药学学报, 2020, 22(2): 315323.
[13]袁会珠, 郭永旺, 薛新宇, 等. 植保无人飞机的推广应用对于提高我国农药利用率的作用[J]. 农业工程技术, 2018, 38(9): 4650.
[14]MUNJANJA B, NAUD Y, FORBES P. A review of sampling approaches to off-target pesticide deposition [J/OL]. Trends in Environmental Analytical Chemistry, 2020, 25: e00075. DOI10.1016/j.teac.2019.e00075.
[15]ZHU Heping, SALYANI M, FOX R D. A portable scanning system for evaluation of spray deposit distribution [J]. Computers and Electronics in Agriculture, 2011, 76: 3843.
[16]SALYANI M, ZHU H, SWEEB R D. Assessment of spray distribution with water-sensitive paper cards [J]. Agricultural Engineering International CIGR Journal, 2013, 15(2): 101111.
[17]HEWITT A J, MEGANASA T. Droplet distribution densities of a pyrethroid insecticide within grass and maize canopies for the control of Spodoptera exempta larvae [J]. Crop Protection, 1993, 12(1): 5962.
[18]DEGRE A, MOSTADE O, HUYGHEBAERT B, et al. Comparison by image processing of target supports of spray droplets [J]. Transactions of the ASAE, 2001, 44: 217222.
[19]HEWITT A, BALSARI P, CARPENTER P, et al. Tracer and collector systems for field deposition research [C]∥Aspects of Applied Biology, Cambridge, U. K, 2010: 283289.
[20]邱白晶, 王立偉, 蔡东林, 等. 无人直升机飞行高度与速度对喷雾沉积分布的影响[J]. 农业工程学报, 2013, 29(24): 2532.
[21]WANG Guobin, LAN Yubin, YUAN Huizhu, et al. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers [J/OL]. Applied Sciences, 2019, 9: 218. DOI:10.3390/app9020218.
[22]WANG Guobin, LAN Yubin, QI Haixia, et al. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: effect of spray volume on deposition and the control of pests and disease in wheat [J]. Pest Management Science, 2019, 75(6): 15461555.
[23]陳盛德, 兰玉彬, BRADLEY K F, 等. 多旋翼无人机旋翼下方风场对航空喷雾雾滴沉积的影响[J]. 农业机械学报, 2017,48(8):105113
[24]ZHANG Pan, DENG Lie, LYU Qiang, et al. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution [J]. International Journal of Agricultural and Biological Engineering, 2016, 9(4): 4552.
[25]秦维彩, 薛新宇, 周立新, 等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J]. 农业工程学报, 2014, 30(5): 5056.
[26]QIN Weicai, QIU Baijing, XUE Xinyu, et al. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers [J]. Plant Protection, 2016, 85: 7988.
[27]陈盛德, 兰玉彬, 李继宇, 等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报, 2016, 32(17): 4046.
[28]CHEN Pengchao, LAN Yubin, HUANG Xiaoyu, et al. Droplet deposition and control of planthoppers of different nozzles in two-stage rice with a quadrotor unmanned aerial vehicle [J/OL]. Agronomy, 2020, 10(2): 303. DOI: 10.3390/agronomy10020303.
[29]陈盛德, 兰玉彬, 周志艳, 等. 小型植保无人机喷雾参数对橘树冠层雾滴沉积分布的影响[J]. 华南农业大学学报, 2017, 38(5): 97102.
[30]屠俊, 丁素明, 薛新宇, 等. 不同雾滴在柑橘树中的沉积分布及灭杀性研究[J]. 农机化研究, 2020, 10: 195199.
[31]姚伟祥, 兰玉彬, 郭爽, 等. 赣南山地柑桔园有人驾驶直升机喷雾作业雾滴沉积效果[J]. 中国南方果树, 2020, 49(2): 1318.
[32]李继宇, 兰玉彬, 施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报, 2018, 34(12): 104118.
(责任编辑:杨明丽)
