基于非线性动态逆的无人机直接升力控制
2021-01-04魏治强王新华王凯
魏治强,王新华,王凯
(南京航空航天大学,江苏 南京 211100)
0 引言
无人机直接升力控制(DLC)是通过一些操纵面直接产生升力或者侧力,从而改变无人机的轨迹[1]。相比常规无人机升力必须通过机身的旋转得到,DLC大大提高了无人机的灵活性,对于精确飞行控制以及提高机动性具有重要的意义。
针对无人机直接升力控制系统,龚华军等[2]利用后缘襟翼偏转所产生的直接升力抵消迎角扰动产生的气动效果,使无人机达到中性稳定状态,有效地加速了无人机的姿态控制。美国的MAGIC CARPET项目[3]使用直接升力控制设计了飞行轨迹角速率控制模态以及轨迹增量控制模态,提高了着舰的安全性和成功率。王亚龙等[4]针对菱形布局无人机设计了自抗扰无人机直接升力控制,解决了着陆时姿态以及轨迹控制的问题。SHAPIRO E Y Sobel[5]根据MIMO的线性小扰动无人机模型,采用特征结构配置的方法设计了直接升力以及直接侧力多模态控制律。MERAT R[6]针对空客A380飞机设计了经典直接升力控制律,得出DLC能在高湍流环境下提高乘坐舒适性、提高自动着陆性能的结论。这些直接升力控制策略均采用经典的控制理论,动态解耦效果不强。
因此,本文设计了基于非线性动态逆的直接升力控制方法,在垂直机身平移模态下有效地将下沉率和俯仰角的控制动态解耦,并且拥有良好的航迹倾斜角跟踪效果。在直接升力模态下能够保持无人机的迎角恒定,显著提高了航迹倾斜角控制环的带宽。引入PID控制器和1阶参考模型,鲁棒性强,控制结构简单,易于工程实现。
1 鸭式布局无人机运动模型分析
某鸭式布局无人机气动布局如图1所示。Og代表无人机质心位置,Oa代表无人机气动中心,其具有水平鸭翼,双垂尾布局。襟翼产生俯仰力矩的力臂较短,对无人机姿态的影响较小,拟用作直接升力操纵面。
该飞机对象特性的建模可以用包含12个1阶非线性微分方程的方程组来描述[7]:
(1)
其中:x=[Vx,Vy,Vz,ωx,ωy,ωz,ϑ,γ,ψ,xg,hg,zg]T,矩阵内各变量分别表示无人机三轴机体速度、三轴欧拉角速率、三轴欧拉角以及北向位置、高度和东向位置;u=[δa,δe,δT,δr,δf]T,矩阵内各变量分别表示副翼、鸭翼、油门、方向舵和襟翼出舵量;t代表时间。
采用鸭翼和襟翼用作无人机的直接升力控制面时,襟翼作为直接升力主要操纵面,鸭翼则用于平衡襟翼产生的俯仰力矩。接下来验证该无人机使用直接升力控制方法的可行性。
(2)
在襟翼出舵角限幅为30°的情况下,此时鸭翼出舵角约为13.6°,无人机质量m=18 kg,那么直接升力控制舵面为无人机能提供最大的直接升力在±0.3 g左右,所带来的升力控制量相当于迎角增加3.7°的升力增加量。因此襟翼和鸭翼能为无人机提供足够的升力增量用于直接升力控制模态的设计[8]。
2 控制律设计
非线性动态逆控制系统的输入为[9]:
(3)

2.1 航迹倾斜角动态逆控制
航迹倾斜角动态逆控制结构图如图2所示,其辅助输入:
(4)
参考模型选用1阶惯性系统,1/Tγ表示闭环系统期望的带宽性能,本文设置为3 rad/s。从图2中可以看到从参考模型1阶时间导数到线性PID控制器的前馈通道,它可以消除跟踪期望指令γc时出现的时间延迟。内环动态逆控制律由于建模误差以及舵面操纵力矩的影响,只是近似的动态逆系统,因此线性控制器设计为PID控制器。积分环节引入对误差的积分,消除了系统的稳态误差。系统的输出采用δe/δf,相比于单鸭翼输出而言,襟翼没有非最小相位瞬态,可以大大提升无人机的灵活性,因此提升了γ通道的带宽。
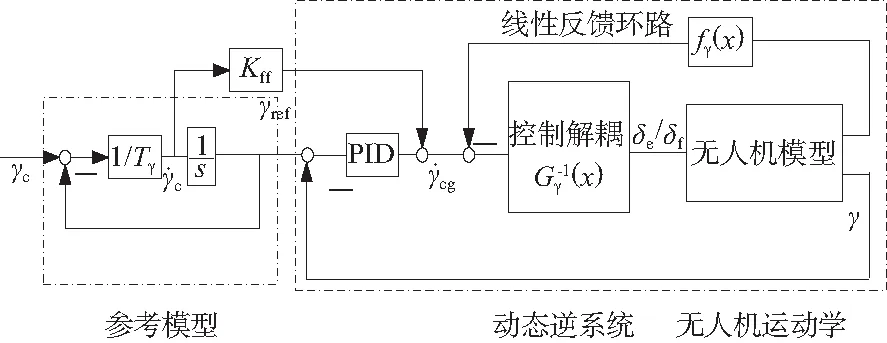
图2 航迹倾斜角动态逆控制系统
无人机的航迹倾斜角角速率
(5)
(6)
式中:L表示升力;T表示推力;θT表示发动机的安装角;S表示机翼有效面积。
由于直接升力控制模态和垂直平移控制模态下,鸭翼和襟翼的俯仰力矩应该相互平衡,则
(7)

联立式(4)-式(7)可得航迹倾斜角动态逆控制律:
(8)
2.2 姿态环动态逆控制系统
根据系统的动力学方程:
(9)
式中c1、c2、…、c9可从文献[10]中得到。
无人机的滚转俯仰力矩方程:
(10)
联立式(9)-式(10)可得内环动态逆控制律为:
(11)
姿态环的控制结构如图3所示。
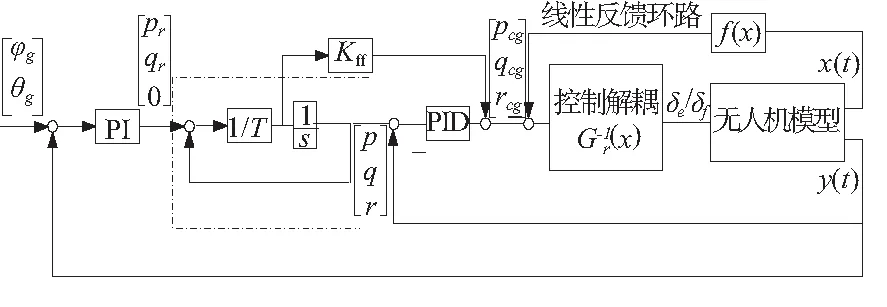
图3 姿态环的控制结构
姿态环控制结构采用内环+外环的控制结构,内环采用航迹倾斜角动态逆相似的架构,引入前馈以及参考模型。前馈的引入提高角速率环的动态响应,而外环角度环采用经典PI控制。内回路期望航向角速率设置为0,是为了提高无人机的航向阻尼特性,改善无人机的荷兰滚模态。
外环控制律设计为:
(12)
3 直接升力控制模态的实现
本文主要研究的是直接升力控制中的直接升力模态以及垂直机身平移模态。直接升力模态,即是在迎角保持不变(α=0)的基础上,控制无人机的法向加速度,从而直接控制无人机的航迹倾斜角。由于Δα=0,那么在滚转角很小的基础上,Δθ=Δγ。垂直平移模态,即是在不改变机身俯仰角(Δθ=0)的基础上,控制无人机在垂直方向上上下平移,Δα=-Δγ。
3.1 直接升力模态的实现
直接升力模态下控制无人机法向加速度并且保持无人机的迎角不变,航迹倾斜角动态逆控制信号到襟翼,与此同时还需要同时偏转鸭翼,以保持俯仰力矩平衡,其示意图如图4所示。

图4 直接升力模态传动比示意图

(13)
其中MδF和Mδe是气动系数的导数,与无人机的(V、α)相关。为保证控制精度,仅靠开环补偿是不够的,必须加上使迎角Δα=0的闭环修正。本文选择油门控制迎角恒定,其控制结构如图5所示。

图5 迎角恒定控制器

(14)

非线性动态逆直接升力模态的实现,需要断开姿态环俯仰角的控制,使用航迹倾斜角动态逆控制系统+迎角恒定控制系统。
3.2 垂直机身平移模态的实现
垂直平移模态要求保持俯仰姿态不变的情况下,控制无人机的垂向速度。因此偏转襟翼时,需要偏转鸭翼以平衡俯仰力矩,其传动比与直接升力模态相同。由于Δα=-Δγ,因此需要引入kΔα·Δα信号到襟翼输出中,用作Δα的偏置补偿,并且由于Δα改变,无人机静稳定力矩改变,因此必须引入姿态保持系统,以平衡无人机静稳定力矩。其传动比结构图如图6所示。

图6 垂直平移模态传动比结构图
由图6可以得到:
(15)
非线性动态逆直接升力控制系统需要断开迎角保持回路,使用航迹倾斜角动态逆控制器(加入Δα反馈偏置)+俯仰角保持系统。
4 仿真验证
仿真分为两部分:1)对姿态控制闭环回路进行仿真验证,然后在保持滚转角在配平状态的基础上,验证航迹倾斜角动态逆控制器的控制性能。2)验证本文设计的直接升力控制模态以及垂直平移模态控制器的控制性能。仿真的初始条件为H=100 m,V=30 m/s,无人机配平输入为utrim=[0,-0.007 7,0,0,0.34,0],配平状态量xtrim=[29.93,0,0.628,0,0,0,0,0.021 1,0],控制参数整定如表1所示。

表1 控制参数整定
4.1 姿态环和航迹倾斜角控制系统仿真
姿态环期望指令选取φg=θg=5°,仿真时长15 s,仿真结果如图7所示。

图7 姿态环动态逆控制系统响应曲线
从图7中可以看出姿态外环的上升时间为1.8 s,调节时间为2.4 s左右,并且稳态误差几乎忽略不计,内环角速率误差在2.5 s左右稳定,动态响应满足要求。
断开俯仰角控制器,设置期望滚转角φg=0,期望航迹倾斜角γg=5°,航迹倾斜角动态逆控制仿真结果如图8所示。
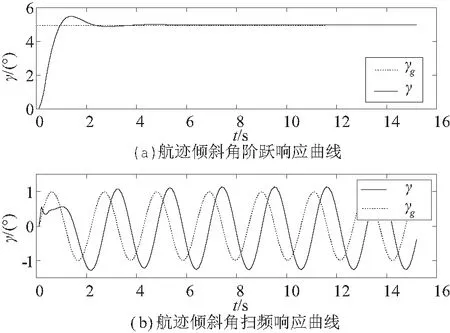
图8 航迹倾斜角动态逆控制系统响应曲线
从图8(a)可以看出,航迹倾斜角的上升时间为0.7 s,调节时间为1.8 s,稳态误差为0,动态响应良好。接着用频率3 rad/s、幅值为1的扫频信号对闭环系统进行测试,仿真结果如图8(b)所示。闭环响应没有幅值衰减,但有一定的相位滞后,相位滞后约为90°,因此航迹倾斜角的带宽约为3 rad/s,相比于常规航迹倾斜角闭环系统而言,其带宽提高了约8倍。
4.2 直接升力和垂直机身平移模态仿真
断开俯仰角控制器,设置期望滚转角φg=0,期望航迹倾斜角γg=5°,加入油门迎角保持系统,测试直接升力控制模态,其仿真结果如图9所示。

图9 直接升力模态仿真
根据仿真结果可以看出,图9(a)航迹倾斜角动态响应和图8(a)基本一致,动态响应良好。图9(b)反应了直接升力模态中θ、α、γ的变化,迎角α在2 s左右稳定在无人机的配平迎角1.2°,并且保持不变,此时Δθ=Δγ,符合直接升力模态的特征。
断开油门迎角保持系统,设置期望滚转角φg=0°,期望航迹倾斜角γg=2.4°,加入俯仰角控制器,设置期望俯仰角为配平俯仰角1.2°,测试垂直机身平移控制模态,其仿真结果如图10所示。

图10 垂直机身平移模态仿真
图10(a)是航迹倾斜角响应曲线,垂直平移模态下,其动态响应由于迎角的减小而比直接升力模态慢,上升时间和调节时间约为4 s,没有超调以及稳态误差。由图10(b)可以看出,在1.5 s以后,俯仰角进入稳态,稳定在配平俯仰角1.2°,Δα=-Δγ,在4 s以前建立法向加速度,当建立一定的迎角变化后,无人机升力减小,法向加速度趋向于0。飞机在姿态不变条件下以一定的航迹倾斜角飞行,符合机身垂直平移模态的特征。
5 结语
本文研究了一种基于非线性动态逆的直接升力控制方法,将其应用于鸭式布局无人机飞行控制系统的设计。在动态逆控制系统中加入期望指令模型,用于给出期望指令的动态过程,闭环系统的动态过程符合一般飞行品质的要求,加入参考模型到线性PID控制器的一阶时间导数前馈,消除了跟踪参考信号的时间延迟。根据姿态角和航迹倾斜角动态逆控制系统设计了直接升力模态以及垂直平移模态控制律,其动态响应良好,相比于经典连续闭环高度控制系统而言,带宽更高,航迹跟踪更加精确。
