一种双车协同搬运控制技术的研究
2021-01-04胡泊楼佩煌钱晓明武星楼航飞
胡泊,楼佩煌,钱晓明,武星,楼航飞
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
当前全球在“德国工业4.0”、“中国制造2025”等新兴理念影响下,智能物料输送系统应运而生,自动导引车(automated guided vehicle,AGV)已成为工业自动化和物流自动化系统的重要部分。但是当需要运输例如飞机机翼、高铁车厢等大型零部件时,单AGV就会暴露出结构强度较弱、承载不足的缺点。为了解决这类问题,可以通过利用现有结构简单、易于设计制造的AGV,采用多AGV协同搬运大型零部件。本文提出了一种基于Leader-Follower控制策略的双AGV编队的方法[1]和基于指数趋近率的自适应滑膜控制器,以实时调整从车轨迹跟踪误差,最终实现大型零部件的搬运。
1 双车协同搬运模型
本文使用麦克纳姆轮AGV作为双车协同搬运的平台,该搬运模型如图1所示。

图1 双车协同搬运模型
图1中主车按照既定的轨迹运行,从车和主车之间保持确定距离和角度,即主车和从车采用Leader-Follower编队策略,按照预设编队队形前行,共同搬运大型的零部件。主车和从车搭载着零部件承载平台,该平台可小幅旋转和移动,保证了从车在轨迹跟踪存在偏差的时候有一定的余量进行距离补偿和角度补偿。两车所搬运零件的长度为L,两车之间夹角为θ。双车协同搬运模型即保证在运输过程中保持L和θ不变。
2 运动控制分析
2.1 麦克纳姆轮AGV的运动模型
设麦克纳姆轮AGV轮距为2 m,轴距为2L。设第i个车轮的角速度为ωi(i=1,2,3,4),单位为rad/s。当车体与世界坐标系下的夹角为β时,车体中心的速度为:
(1)

2.2 主-从车轨迹跟踪误差模型
在主-从车协同搬运的过程中,主车沿着既定的路径前进,从车以主车的位姿作为参考点实时调整运动状态,以保持主-从车之间的相对位姿不变,即相对于主车,从车保持静止。因此可以将主-从车协同搬运的问题转换为从车的轨迹跟踪问题。
对于从车的轨迹跟踪,首要任务是保持从车对主车的相对静止,即以主车的几何中心为参考点,主-从车几何中心之间拥有确定的距离和角度,进而求解出从车的轨迹跟踪误差[2]。主-从车控制模型如图2所示。

图2 主-从车控制模型图

(2)

(3)

(4)
至此,得出从车的轨迹跟踪误差。其中(xe,ye,φe)T是从车与其理想位姿之间的轨迹跟踪误差。于是,主-从协同搬运问题又转换为从车的运动控制器问题。控制器以(xe,ye,φe)T为输入,控制其趋近于0,最终保持主从车的相对静止。
2.3 从车轨迹跟踪运动控制器

1)基于指数趋近律的滑模控制器
对于从车的运动控制,因为滑模变结构能够对非线性系统以及非连续性系统进行控制,并且响应迅速,具有较强鲁棒性,但是由于主-从车运行环境复杂以及伺服电机系统的不稳定性,滑膜趋近率的参数需要进行实时调整,因此本文采用基于指数趋近律的滑模控制轨迹跟踪控制器对从车进行控制[3]。

(5)
其中:Kp=diag(Kp1,Kp2,Kp3);Ki=diag(Ki1,Ki2,Ki3)。
为了提高系统的稳定性,减少滑膜控制在控制过程中位于平衡点的抖动,本文采用基于指数的滑模趋近律方法。相较于一般趋近率、等速趋近率等方法,该方法具有快速收敛的特点,能够提高从车实时控制的动态性能。基于指数的滑模趋近律表达式如下:
λi>0,μi>0 (i=1,2,3)
(6)

(7)

符号函数sgn()会导致趋近率趋近0时,在切换面附近出现跳变,导致系统的抖动。为了缓解这种现象,引入饱和函数sat(),其表达式如下:
(8)
其中εi是正小量。则趋近率为:
(9)
2)基于指数趋近律的自适应滑模控制器

(10)
自适应律设计如下:
(11)
对式(5)两端求导,可得:
(12)
即:
(13)
式(13)与式(6)相结合,可得:
(14)
(15)
同理可得:
(16)

结合式(1),即可得到4个轮子修正后的角速度:
(17)
3 仿真与分析
为了验证第1节提出的基于指数趋近率的自适应滑膜控制器应用于麦克纳姆伦AGV轨迹追踪的可行性以及性能,本节对该控制器进行计算机仿真实验。
首先设计一条轨迹,通过对该轨迹的跟踪,分析控制器的性能。设计标称轨迹为
(18)
即: 圆心为(0,0)、半径为1的圆。轨迹的初始位置为[-2,0,0]。采用基于指数趋近率的自适应滑膜控制器进行仿真,仿真测试的系数为:
Kp=diag(11,12,7),Ki=diag(3,3,1);
λ1=λ2=λ3=2;
ρ1=1.5,ρ2=1.5,ρ3=1.5,
其仿真结果如图3-图5所示。
图3为采用基于指数趋近率的自适应滑膜控制器输出的圆弧轨迹跟踪航向角对比图。因为系统初始值与圆弧路径存在较大的偏差值,导致系统实际的航向角与理想航向角存在较大的偏差值。经过2.5 s,实际航向角逐步趋向于理想航向角。图4为圆弧轨迹跟踪航向角度偏差。
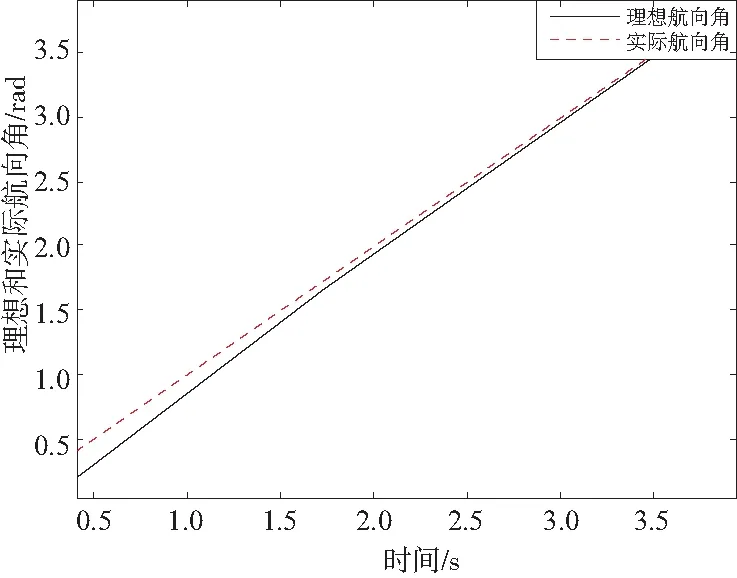
图3 圆弧轨迹跟踪航向角对比图

图4 圆弧轨迹跟踪航向角度偏差
图5为圆弧轨迹跟踪时,在世界坐标系下实际位置与理想位置关于x方向与y方向的误差。经过4 s,误差逐步趋近于0。

图5 圆弧轨迹跟踪距离偏差
图6为圆弧轨迹的位置跟踪图。从图6可以看出,采用基于指数趋近率的自适应滑膜控制器,在有较大偏差的情况下,系统很快收敛于理想路径,并在快速收敛后,系统存在较小误差,稳定于理想路径。因此该控制器具有很好的实时性、精确性和鲁棒性。

图6 圆弧轨迹的位置跟踪图
4 结语
本文提出了一种基于Leader-Follower编队策略的双车协同搬运方法,为解决搬运大型复杂零部件提供了一种思路。主车按照既定路线运行,从车实时跟踪主车保持理想编队队形。在实时调整轨迹跟踪误差时,本文所提出的基于指数趋近率的自适应滑膜控制器具有很好的实时性、精确性和鲁棒性。
