三八超混沌系统的时滞反馈控制
2020-12-28李德奎
摘 要:本文研究了时滞反馈控制的三八超混沌系统平衡点的Hopf分岔问题。首先分析了线性化系统特征方程纯虚根的存在性,然后讨论了平衡点发生Hopf分岔的横截性条件,给出了系统平衡点失稳发生Hopf分岔的时滞值,最后数值仿真证明了理论分析的正确性。
关键词:三八超混沌系统;时滞反馈控制;Hopf分岔
中图分类号:O175
文献标识码: A
美国著名气象学家Lorenz于1963年提出第一个三维连续混沌系统,称之为Lorenz系统[1],此后,大量的混沌系统相继被提出,比较著名的连续混沌系统有Chen系统[1]、Lü系统[1]和Chua电路系统[2],离散系统有Logistic映射[3]、Hénon映射[4]等。文献[5]基于Lorenz混沌系统,利用增加状态方程和反馈控制的方法,提出了一个新超混沌系统,由于其混沌吸引子形状出现了数字“3”和“8”的样式,为此将这个超混沌系统称为“三八超混沌系统”。
混沌控制是混沌应用的前提,比较著名的混沌控制方法有:参数微扰法[6]、时滞反馈控制法、自适应控制法、滑模变结构控制法等。时滞反馈控制法是一类重要的混沌控制方法,一方面时滞反馈控制法不需要知道精确的系统模型,这一点是参数微扰法方法无法比拟的;另一方面时滞现象在通信和生态系统中是普遍存在的[7],例如通信过程中信号传输的拥挤阻塞,捕食者从出生到具有捕食能力,需要一定的成长时间等。因此, 有必要研究时滞反馈控制混沌系统的动力学行为。
许多学者在时滞动力系统方面做了大量工作。文献[8]研究了Arneodo混沌动力系统的时滞反馈控制,分析了系统平衡点的稳定性及局部Hopf分岔的存在性。文献[9]研究了时滞反馈控制Rssler系统的平衡点的局部稳定性和Hopf分岔的存在性。文献[10]研究了一类食饵具有阶段结构的时滞捕食系统的全局稳定性与Hopf分岔。然而这些研究考虑的是三维混沌系统的时滞反馈控制或时滞依赖分析。目前,对时滞反馈控制的四维超混沌系统的动力学研究却较少,同时超混沌系统是比混沌系统更加复杂的动力系统,能够产生更加复杂的时间序列,在保密通信与图像加密领域具有重要的应用价值。
基于以上考虑,本文对三八超混沌系统进行了继续研究,给出了时滞反馈控制的三八超混沌系统模型,分析了其平衡点的稳定性以及平衡点失稳时发生Hopf分岔的参数空间和时滞值。本文的研究可以看成是对文献[8-10]研究成果的进一步推广,具有一定的理论价值。
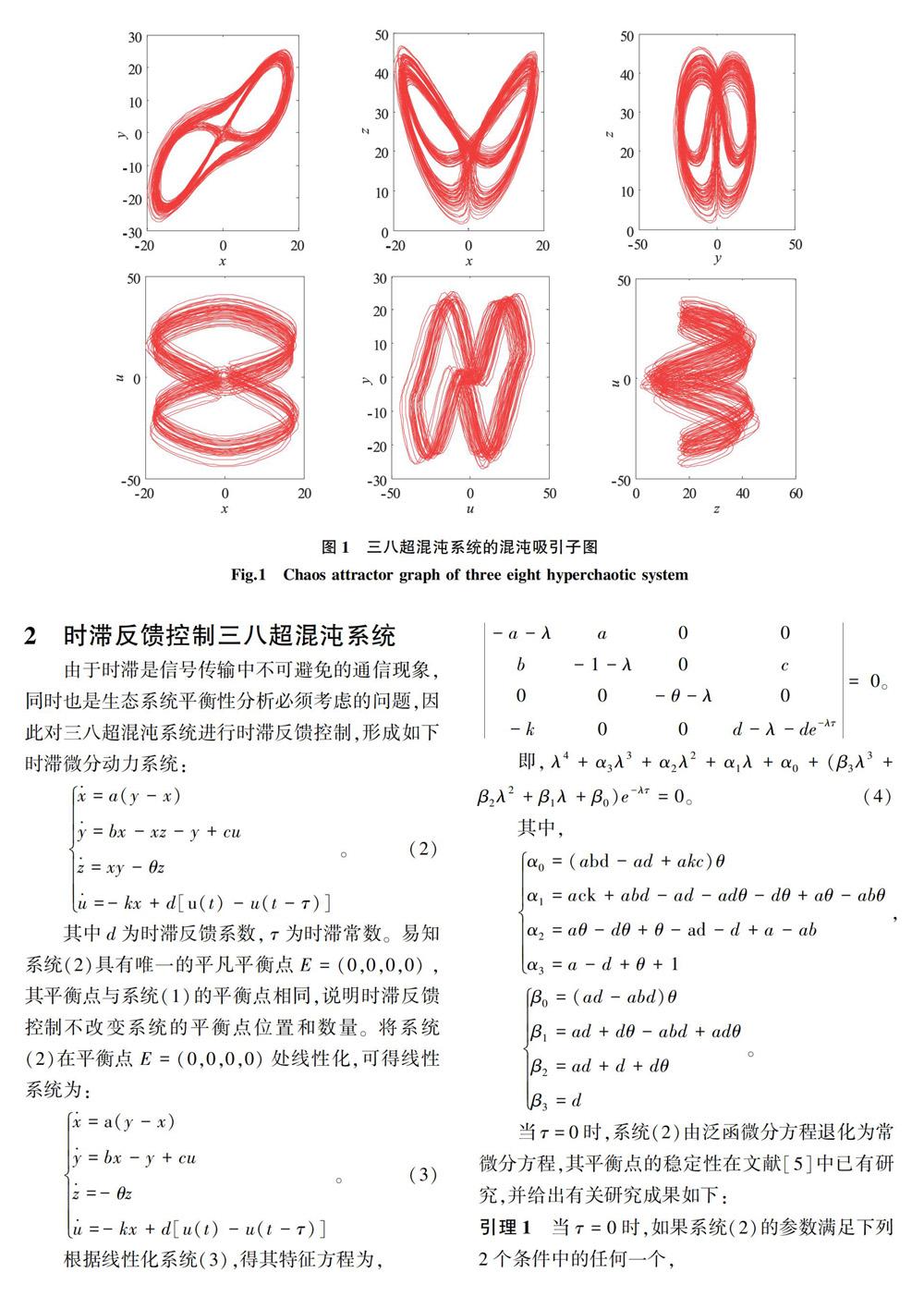
1 三八超混沌系统
文献[5]基于著名的三维Lorenz混沌系统,利用线性反馈方法,构造了三八超混沌系统,其动力学方程为:
2 时滞反馈控制三八超混沌系统
由于时滞是信号传输中不可避免的通信现象,同时也是生态系统平衡性分析必须考虑的问题,因此对三八超混沌系统进行时滞反馈控制,形成如下时滞微分动力系统:
3 数值仿真
为了研究系统(2)在平衡点的稳定性问题,检验定理4的三个条件。数值仿真在满足条件 (H1)中①的情况下进行,对于条件 (H1)中②的情况与①的情况类似,这里不再赘述。
4 结论
本文对三八超混沌系统进行了时滞反馈控制,被控的超混沌系统是一个泛函微分动力系统,通过线性化系统的特征方程根的分布,分析了時滞值对系统平衡点的影响,给出了系统在平衡点附近发生Hopf分岔的参数和时滞条件。本文的研究成果可以看作是对被控三维混沌系统研究的进一步延伸,具有重要的理论意义和应用价值。
参考文献:
[1]陈关荣, 吕金虎. Lorenz系统族的动力学分析、控制与同步[M]. 北京: 科学出版社, 2003.
[2]CHUA L O, KOMURO M, MATSUMOTO T. The double scroll family. Part I: Rogorous proof of chaos[J]. IEEE Trans. Circuits. Syst., 1986, 33: 1072-1096.
[3]刘秉正, 彭建华. 非线性动力学[M]. 北京: 高等教育出版社, 2005.
[4]刘晓君, 李险峰, 何万生. 二维三次方离散系统的混沌控制与广义同步[J]. 河北师范大学学报(自然科学版), 2010, 34(4), 406-410.
[5]李德奎. 一个新超混沌Lorenz系统的Hopf分岔及电路实现[J]. 宁夏大学学报(自然科学版), 2016, 37(3), 294-301.
[6]OTT E, GREBOGI C, YORKE J A. Controlling chaos[J]. Physics Review Letters, 1990, 64(11): 1196 -1199.
[7]CHEN H B. Hopf Bifurcation and stability analysis for a predator-prey model with time-delay[J]. Chin. Quart. J. of Math, 2015, 30 (1): 93-106.
[8]徐昌进. Arneodo混沌动力系统的时滞反馈控制[J]. 西南大学学报(自然科学版), 2013, 35(3): 1-8.
[9]陈立林, 徐昌进. 时滞反馈控制策略在三维混沌系统中的应用[J]. 河北师范大学学报(自然科学版), 2018, 42(6): 465-471.
[10]袁媛, 段复建. 一类食饵具有阶段结构的时滞捕食系统的全局稳定性与Hopf分支[J]. 云南大学学报(自然科学版), 2013, 35(1): 13 -20.
(责任编辑:于慧梅)
