精密电子设备运输预警系统实现
2020-12-25张小峰
杨 楠,薛 帆,张小峰
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
精密电子设备包括精密测试仪器仪表、电子控制机柜、通信传输装置等。在运输过程中精密电子设备容易因驾驶员操作不当造成冲击或者碰撞,或因车厢环境因素影响导致仪器参数发生变化、贵重物品损毁等情况,使得仪器测量结果不准确或者无法正常使用,甚至发生灾难性的损毁。在实际生产活动中,由于保密需求及实际运输环境需求,各种精密电子设备可能需要通过汽车进行长途运输。
精密电子设备在运输过程需要极其规范的运输流程及运输记录。当一台电子控制机柜经历的机械振动超过了建议级别将会发生机柜机械结构损坏、元器件预设参数发生变化等损害。[1]这些损害一般比较隐蔽但危害极大。如果操作不慎造成精密设备损坏,使用时极易发生故障从而导致各类使用问题的出现。所以,在物流运输过程中对冲击有如下要求:精密电子设备在刹车操作过程中发生的纵向冲击和由于路面情况而出现的垂直和横向冲击、垂直和横向加速度应小于0.5 g(重力加速度值);避免发生滚动、颠簸和偏离航线;避免以规律性周期出现的低频率振动;横滚最大加速度应小于0.3 g。[2-3]所以,需要一种准确性高、灵敏度好、低功耗、低成本、实时性的精密电子设备运输预警系统对整个运输过程中受到的速度、加速度、震动和撞击,以及环境的温湿度等进行检测和记录,当精密物体受到损坏或可能发生损坏时进行预警,并为最终损坏判定提供数据支持。
车辆姿态解析是精密物品运输状态追踪预警系统中的关键技术。该技术的研究日益受到国内外学者的广泛关注[4]。该技术应用三轴加速度系列传感器(如加速度传感器、陀螺仪、地磁传感器)得到车辆姿态信息,并对其进行有效处理、分析,能够准确无误地识别出车辆的运行状态,从而判断是否发生碰撞;应用温湿度传感器从而判断温湿度、光照强度对精密物品是否有影响。当以上数据超出设定阈值,管理端会向车载显示端发出提示信息来指导驾驶员的驾驶行为。[5]
1 预警系统框架设计
精密雷达设备动态运输预警系统整体框架如图1所示,其主要分为检测系统和数据处理系统。
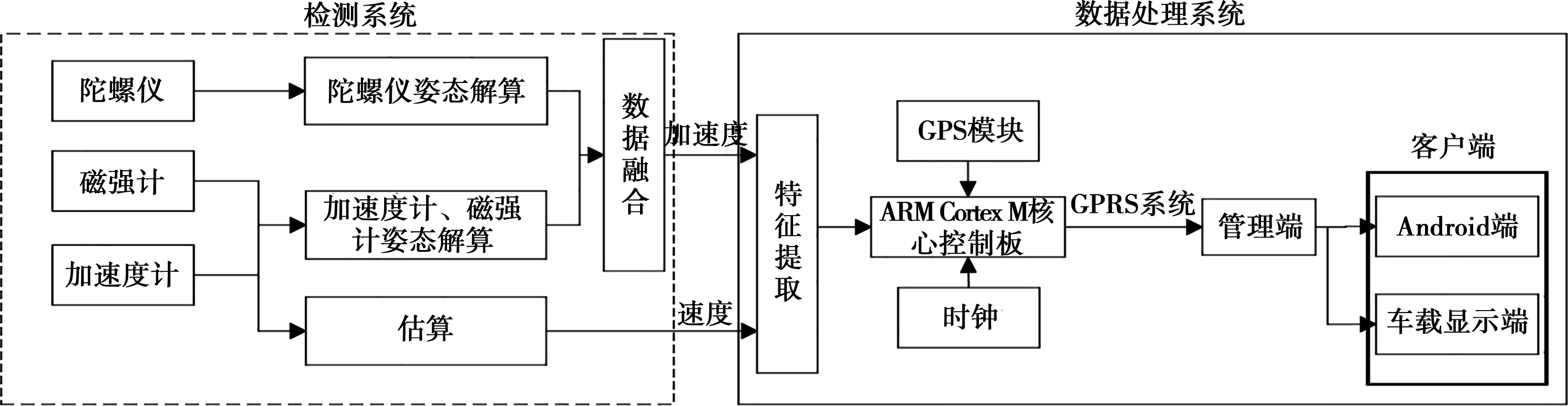
图1 可视化管理系统框架设计示意图
精密电子设备预警系统的检测系统以航向姿态参考系统为基础实现交通工具姿态和速度信息的估计。航向姿态预测系统主要由陀螺仪、三轴加速度计和三轴磁强计等传感器组成,能够提供载体三轴的姿态角度、加速度、角速度、磁场值等信息。当对三轴加速度传感器数据进行融合分析后,核心控制板将这些数据连同温湿度、GPS地理信息数据与时钟信息通过GPRS模块发送至管理端进行数据处理与存储。这些数据都可以使用唯一的ID通过web客户端和Android客户端进行查询及轨迹追踪。
管理端数据处理程序接收GPRS模块发送的解析的车辆行为参数,以及环境温湿度、GPS地理位置和时间信息。管理端对车辆行为参数进行特征提取,进而识别车辆行为,并对识别出的车辆行为、温湿度信息进行判断,若超出设定阈值则会发送预警信息至车载显示端,以此来对驾驶员的驾驶行为进行指导。管理端数据处理程序的流程如图2所示。
2 车辆行驶姿态解析
车辆行驶姿态解析是航向解析中一个重要的研究方向。航向解析一般依靠安装在车辆载体上的磁强计解算出车辆加速度,接着通过安装在车辆上的磁力传感器、相应的车载陀螺仪以及加速度计测量出运输载
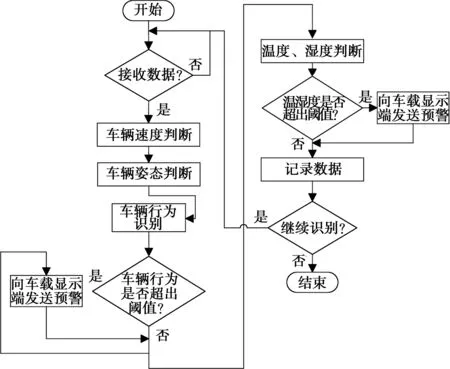
图2 管理端数据处理程序流程图
体的方位,最后通过多元异构的方式对车辆的姿态进行解析。
本系统根据精密电子设备运输预警系统的实际需求使用陀螺仪、加速度计和磁强计搭建航向姿态参考系统计算姿态、速度的估计,其结构如图3所示。
本系统的车辆解析框架采用实时旋转陀螺仪对车辆载体的变化角度进行求解,通过旋转方位积分的方式可求出车辆载体在运输工程中产生的相对姿态变化角度。接着通过加速度计和磁强计可求得车辆载体的航向坐标系, 最后通过航向坐标系与大地坐标系的坐
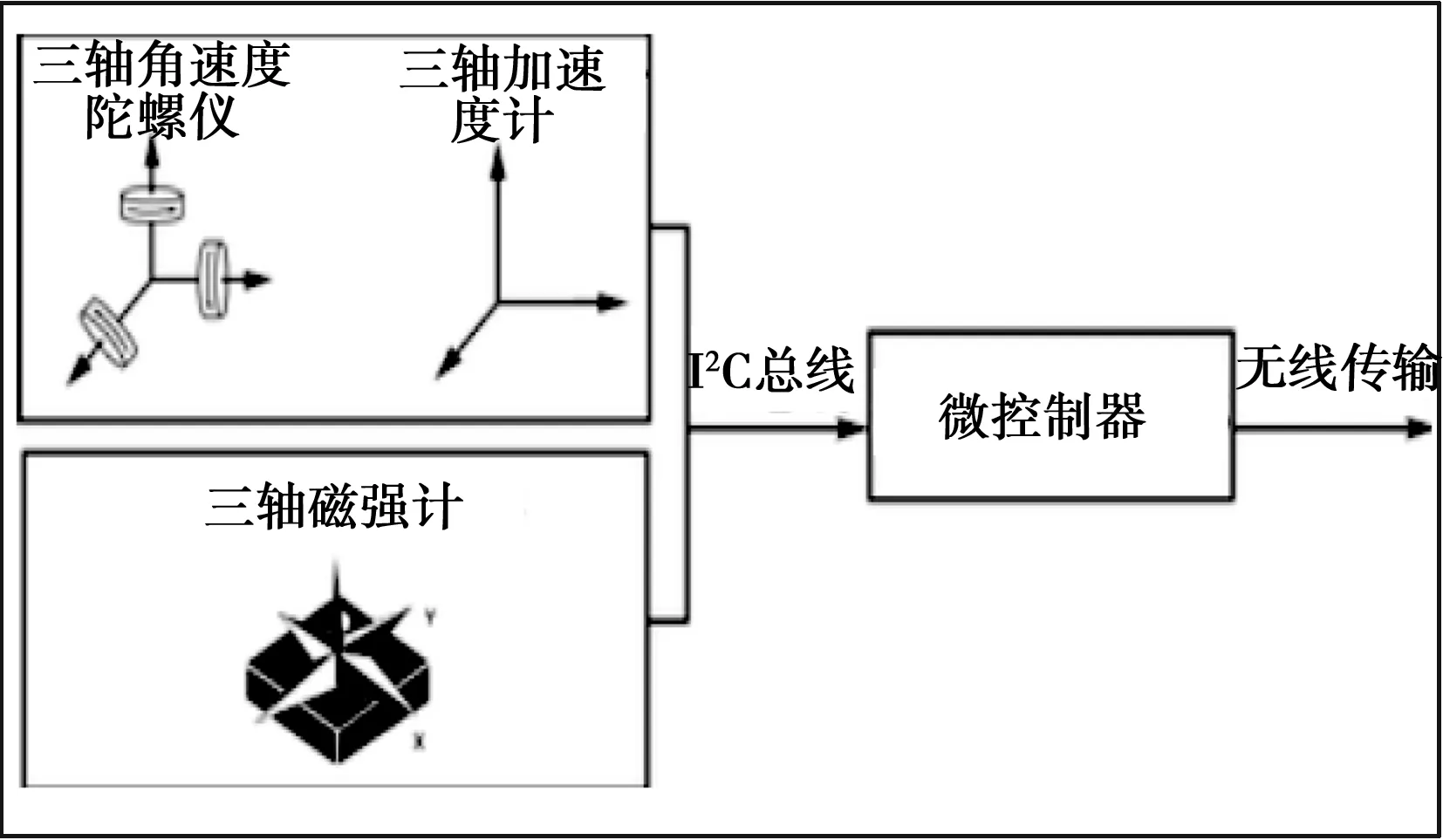
图3 车辆行驶姿态解析示意图
标级联转换的方式求解出车辆载体的航向角。
本系统采用三轴加速度计、三轴磁强计和三轴陀螺仪进行组合姿态测量。首先通过三轴加速度传感器和三轴磁强计测量出车辆载体相应的航向角度。当得到航向角度后,对航线角度在大地坐标系上进行映射,可以估算出车辆载体在大地坐标系上的观测矢量,同时依靠车辆载体在大地坐标系的观测矢量可以得到车辆载体的实时运动轨迹。
在姿态解析系统中,相应的陀螺仪是测量运动姿态最主要的传感器。本系统采用的三轴微机陀螺仪的工作原理是通过科氏加速度反推出振动力块的应力方向,从而可以测量陀螺仪的方位,接着通过检测振动力块的相对位移从而得到陀螺仪相应角速度ω,如图4微机陀螺仪工作原理所示。具体运算如下:
假设在相应的大地坐标系XOY内所对应的m在X轴方位的陀螺仪的振动速度为v,当坐标系XOY绕Z轴以角速度ω旋转时,根据牛顿力学原理,m在世界坐标系XOY的Y轴上产生的科氏力为f=-2m[ω×v],而相应产生的力与角速度ω成正比,所以测量Y轴方向力块m的位移即可求出陀螺仪的角速度ω即运动载体的姿态变化角度。
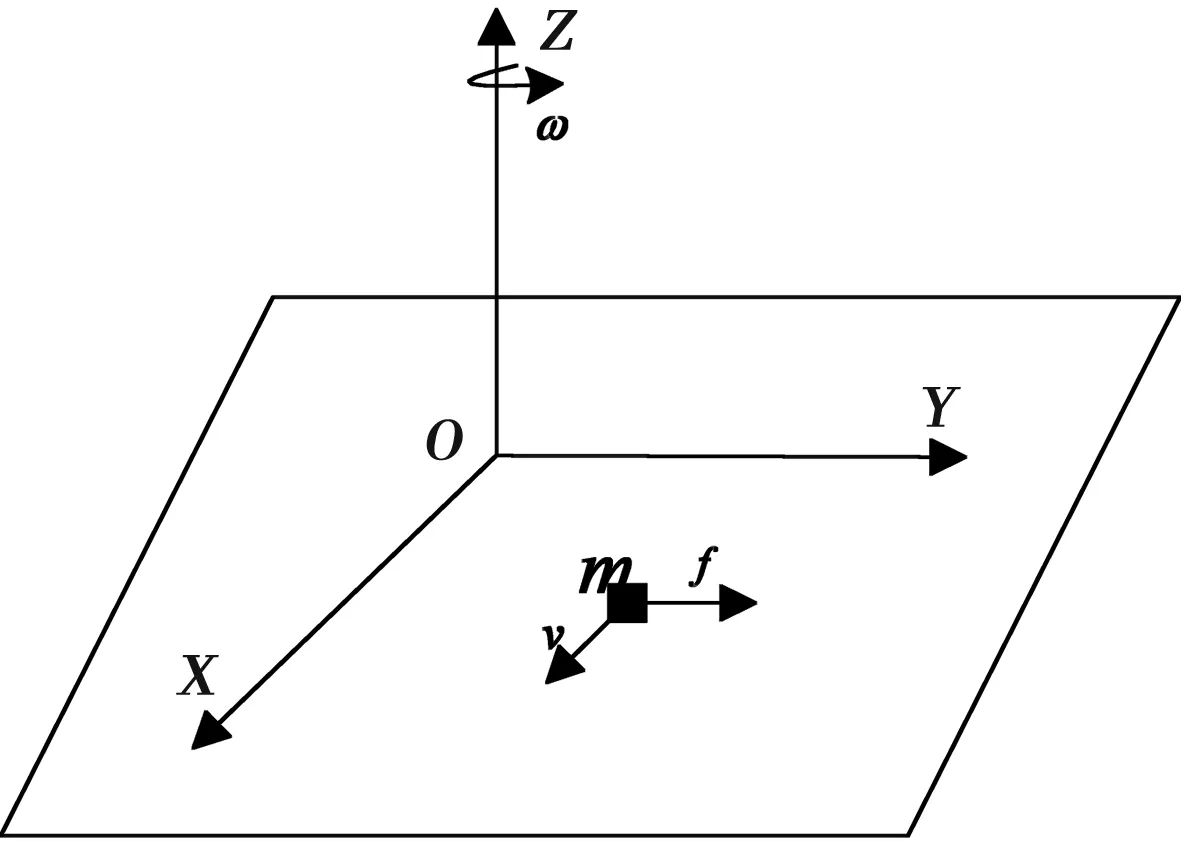
图4 微机陀螺仪工作原理图
在实际的数据测量中,由于物体处于运动状态,物体质点的加速度难以进行直接测量,所以微机加速度计采用将加速度转变成间接牛顿力的方式进行测量。微机加速度计中具有相应的应力块,通过检测测量加速度计中应力块的电容、电压值可以估算出应力块的惯性力,通过测量应力块所受的相应的惯性力即可得出加速度值的大小。
通过加速度计的测量原理可知,加速度力所测量的数据是应力块所受到的惯性力与重力之和,即f=α+g。从平台的加速度得到的结果可知,当加速度计处于完全静止的状态,加速度计输出的就是相应的重力加速度。根据上述数据,可以通过计算重力场在大地坐标系的几何关系从而得到相对应的平台加速度。
磁强计是一种利用电磁感应现象测量所处空间的弱磁场的传感器。磁强计的基本工作原理是利用电磁的交变感应输出非对称变化的电压,通过间接测量输出电压的方式实现磁场的测量。由于环境中地磁场的强度很小,易受到外部磁场的干扰,难以准确测量。因此,只能将磁强计作为一种辅助方式进行航向姿态测量。
车辆姿态解析系统在传感器相应的选型如图5系统硬件部分所示。选用六轴地磁模块LSM403DLH作为三轴加速度计、三轴磁力计的载体。陀螺仪选型为三轴陀螺仪PR430AL()并使硬件与其坐标系与大地坐标系相互对应。系统部分硬件的测量范围、灵敏度、工作温度具体参数如表1所示。
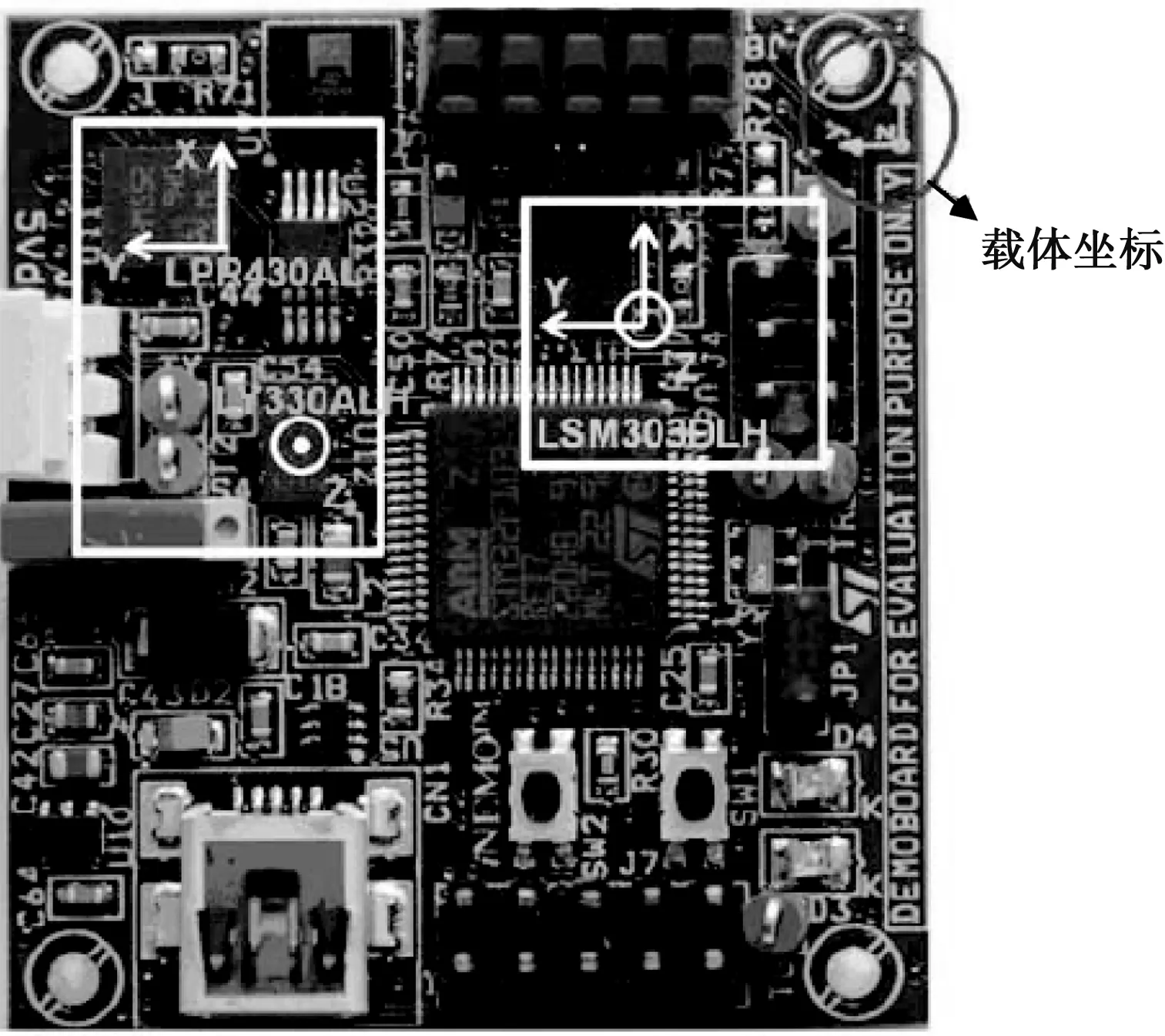
图5 系统硬件实物图
3 预警系统数据处理部分
数据处理部分接收GPRS模块发送的车辆行为参数,以及环境温湿度、GPS地理位置和时间信息。处理部分对车辆行为参数进行特征提取,进而识别车辆运输载体行为,对识别出的车辆行为、温湿度信息进行判断。如果车辆运动行为、车厢内温湿度超出设定阈值则会发送预警信息至车载显示端, 以此来对驾驶员的驾驶行为进行指导。管理端界面如图6所示。本项目同时设计并实现了精密电子设备运输预警系统Android客户查询端。经过后台管理端处理分析的数据全部可以通过客户端查询。车辆每次运输会有唯一的ID对应。客户通过ID查询可以实时地查看汽车在运输过程中的地理位置、温湿度、车速、车辆行为的详细数据,并可查询汽车的行驶轨迹,具体实现如图7、8、9所示。
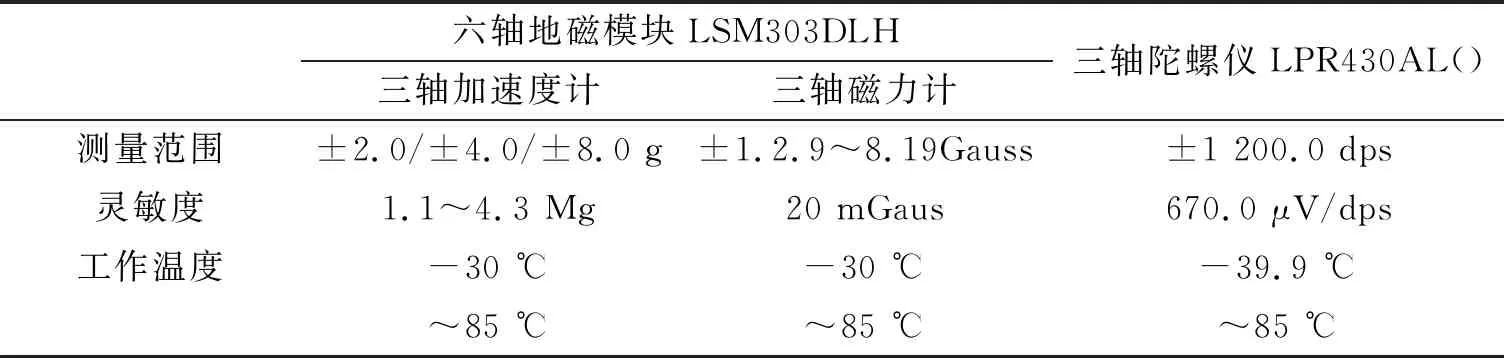
表1 系统部分硬件指标

图6 系统管理端示意图
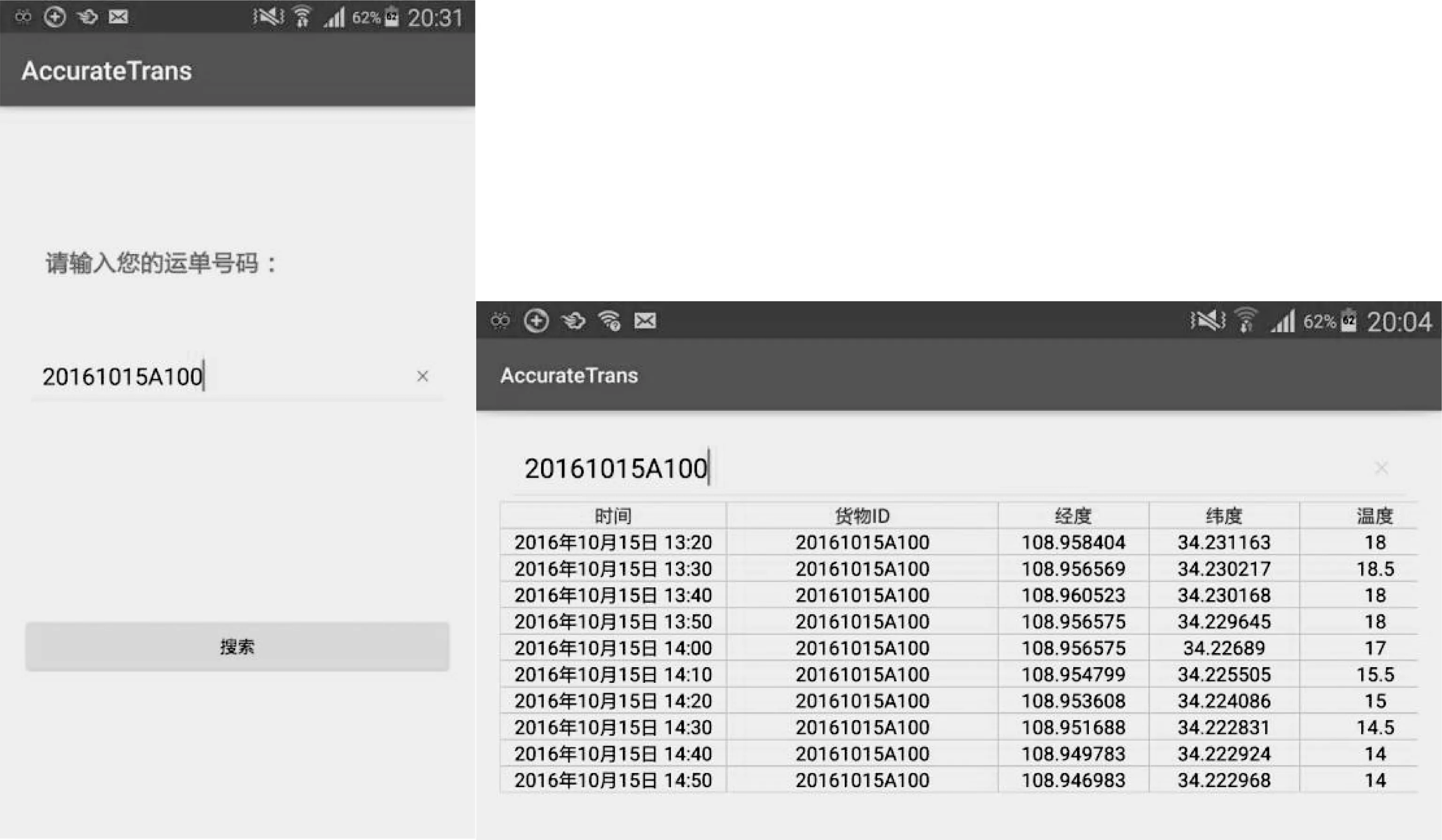
图7 Android客户端界面-查询界面示意图

图8 Android客户端数据分析结果示意图
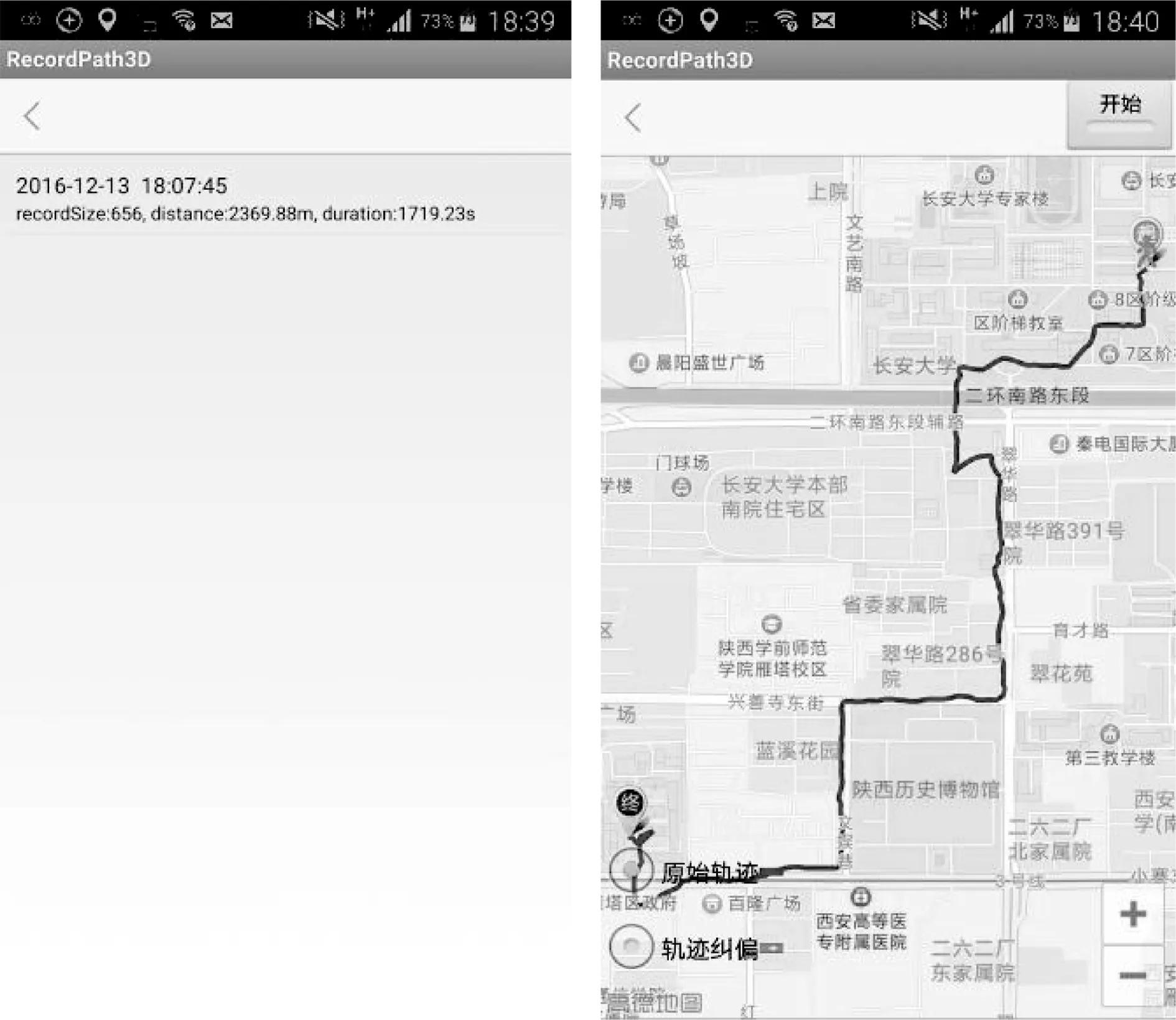
图9 Android客户端界面-轨迹跟踪示意图
4 结束语
本文设计了一种具有精度高、硬件成本低、安装方便等优点的精密电子设备运输预警系统。该设备能够对精密电子设备运输状态进行预警及运输过程进行存储。该系统能够通过融合加速计、磁强计等多源传感器数据解算出运输设备运动中的状态(如载体加速度、载体倾角、载体振动幅度等)。同时,此设备利用温湿度传感器记录精密电子设备运输过程中设备的温湿度状态,并且本系统开发了Android客户端的查询软件,能够通过后台数据库查询历史分析结果、运行轨迹、温湿度等数据。
