资源一号02D卫星几何定位精度保障链设计及在轨验证
2020-12-25安萌梁德印张宏宇韩波于生全
安萌 梁德印 张宏宇 韩波 于生全
(1 北京空间飞行器总体设计部,北京 100094)(2 中国空间技术研究院遥感卫星总体部,北京 100094)(3 北京空间机电研究所,北京 100094)
遥感卫星图像数据的定位精度是衡量卫星图像几何质量的重要的系统指标之一,其指标的高低直接影响到用户对于卫星数据产品应用的效率。资源一号02D卫星(又称为5米光学业务卫星)是自然资源部用户定制的业务卫星,采用一步正样的研制模式,即卫星通过方案设计后,直接进入正样研制,主要应用于国土资源调查、地矿勘探和山水林田湖草等高精度观测等领域。这些领域中目标精细分类,面积估算和红线划定等主要业务对于卫星的几何定位精度均具有较高的要求。
CE90(Circle Error 90%)定位精度评价标准作为当今世界上主流的定位精度评价标准之一,已经被国外大多数遥感卫星的应用评价机构所采用[1]。资源一号02D卫星在几何定位精度的定量化水平,用户对于定位精度要求在无控制点和星下点成像条件下,可见近红外相机(VNIC)平面定位精度≤50 m(CE90),高光谱相机(AHSI)平面定位精度≤100 m(CE90)。这是资源系列卫星第一次采用CE90评价标准对卫星的几何定位精度进行评价。传统的卫星定位精度设计和方法中,主要是针对卫星定位精度进行指标分解,根据分解后各个项目的指标要求,在设计和研制过程中对项目进行控制,最终实现定位精度的要求[2]。但这种方式,没有对影响因素的传递环节进行分析,并与研制流程紧密结合,容易在某个环节上出现疏漏,控制时机也难以把握。同时,也没有对影响定位精度的因素给出一个定量化的权重影响,因此无法对影响定位精度的关键环节进行识别和控制。影响了定位精度的控制结果。
本文根据用户提出的高定位精度要求,梳理出影响定位精度的主要因素,提出了一种卫星定位精度传递保障链的设计方法,在原有定位精度分析控制方法的基础上,增加了控制链路和关键环节分析,并将关键环节与卫星研制流程相结合,从而保证了卫星定位精度控制的全面性和可操作性。通过在轨验证,卫星定位精度各项指标均满足用户指标要求,对其他卫星定位精度的分析和控制具有借鉴意义。
1 几何定位精度指标分解
1.1 几何定位精度表示方法
目前,遥感卫星几何定位精度的评价方法主要分为中误差和圆概率误差两种,两者的定义有较大的差别。遥感卫星以往采用的中误差评价方法主要反映测量值与参考值的偏差程度,即精确度(Accuracy),一般用误差的均方根(RMSE)来度量[3],方差是中误差或均方根误差的平方,比较方便的是采用1σ来进行。中误差的计算方法下。
(1)
式中:xi为某个测量点沿轨方向测量值;yi为某个测量点垂轨方向测量值;x0为某个测量点沿轨方向参考值;y0为某个测量点垂轨方向参考值。Xi为某个测量点沿轨方向测量值与参考值的偏差;Yi某个测量点为垂轨方向测量值与参考值的偏差。ux为沿轨方向测量值与参考值偏差的中误差;uy为垂轨方向测量值与参考值偏差的中误差;σx为沿轨方向的定位精度;n为测量点的个数。σy为沿轨方向的定位精度;σxy是在两个方向上定位精度的均方根误差,即总定位精度。传统中误差评价方法的核心在于中误差的计算,得到几何定位精度σx和σy,即求其样本数据的标准差σ。在计算单一方向上的几何定位精度(沿轨、垂轨)时,传统的中误差评价方法简单可靠[4]。
而圆概率误差的物理意义为样本中的被测点的偏差落在以圆概率误差(Circular Error Probable,CEP)为半径的圆内的概率为P,当P为90%时,CEP即为CE90。以目标点为圆心时,CEP能够表征外部符合精度。资源一号02D卫星采用CEP精度中的CE90来进行几何精度的评价,分别为可见近红外相机不大于50 m和高光谱相机不大于100 m。圆概率误差下的几何定位误差的联合概率密度分布为
(2)
式中:ρ为x、y方向定位误差的相关系数。对于平面几何定位精度来说,圆概率误差和中误差两者的转换关系可以由采用服从二维卡方分布的统计量出发来进行度量。圆概率误差和中误差两个独立随机变量,如果都服从标准的正态分布,则这两个服从正态分布的变量可以构成一个新的随机变量,并服从卡方分布,自由度为2。设两个随机变量分别是X,Y,分别为水平面上X和Y向上的定位误差,且定位结果不存在系统误差,这时X,Y应为独立变量,且服从如下的分布N,式中0为期望,σ2为方差。
X:N(0,σ2),Y:N(0,σ2)
(3)

(4)
通过如下方程可求解CE90对应的半径大小,可由卡方分布在概率小于0.9时的分位点求得。
(5)
通过查表,R=2.146σ。根据两种评价方式的转换关系可以看出,CE90的评价方式较1σ的评价方法的要求更高,50 m(CE90)的定位精度相当于34.2 m(1σ),因此对于卫星各项指标的控制要求更高,需要在卫星方案和正样阶段进行更严格的控制。
1.2 定位精度指标分解
按照常规方法[5-6],在资源一号02D卫星的方案阶段对影响可见近红外相机和高光谱相机定位精度的各项指标进行了分解。
可见近红外相机几何定位精度指标分解如表1所示。高光谱相机几何定位精度指标分解如表2所示。
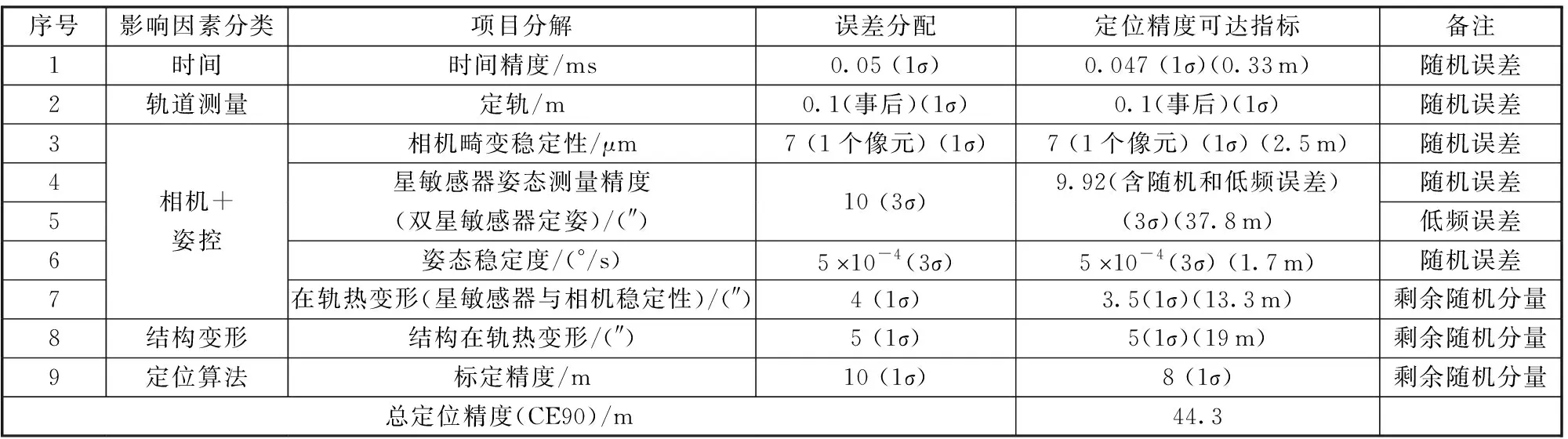
表1 可见近红外相机几何定位精度指标分解Table 1 Distributed factors for geo-location of VNIC

表2 高光谱相机几何定位精度指标分解表Table 2 Distributed factors for geo-location of AHSI
通过分解可以看出,相机和姿控因素是影响资源一号02D卫星两台相机定位精度的主要因素。因此在方案和正样设计中需要重点进行关注。但目前这种分解的方式较为粗犷,在设计和研制过程中难以操作,因此需要将因素进行细化,并给出定量化的传递过程,以便在适当的时机进行过程控制。
2 定位精度保障链设计和实施
2.1 卫星定位精度保障链设计
定位精度设计保障链是将对定位精度影响较大的因素,资源一号02D卫星的定位精度保障链设计是按照误差传递的思路进行,并给出设计和仿真与测试的对应关系。最终给出设计和仿真的关键控制环节。资源一号02D卫星定位精度保障链环节设计流程图如图1所示。
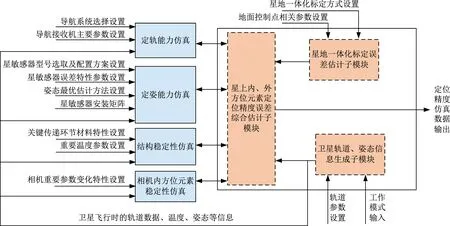
图1 资源一号02D卫星定位精度保障链设计流程Fig.1 ZY-1-02D satellite design flow of geo-location insurance chains
主要的影响定位精度的变量共4个方面分为9项,在图1中已经给出。对应的仿真流程包括星上内、外方位元素精度误差估计、星地一体化标定误差估计和卫星轨道、姿态估计3个关键环节。由于资源一号02D卫星采用一步正样的研制模式,需要进行精准的设计,同时在正样进行严格控制,在方案和正样阶段均制定了详细的研制流程,以便进行控制。
2.2 方案阶段定位精度保障设计
方案阶段定位精度工作的主要目的是对平台和载荷提出具体控制要求。保障链的传递环节为设计目标—设计验证方法—设计结果(正样设计要求),论证工作的技术流程如图2所示。
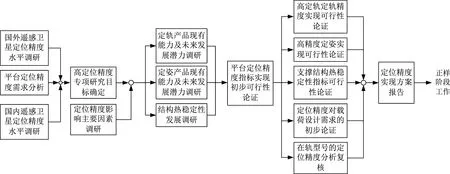
图2 方案阶段提升定位精度工作技术流程Fig.2 Technology flow chart of geo-location upgrade in scheme design phase
结合卫星的研制流程,卫星在方案阶段开展的高精度定姿系统详细设计,主要分为高精度定姿、定轨保障设计,高稳定结构保障设计和高几何精度载荷保障设计3个方面。具体项目见表3、表4和表5所示。

表3 高精度定姿、定轨保障设计Table 3 High-precision attitude and orbit determination design

表4 高稳定性结构保障设计Table 4 High-precision structure insurance design

表5 高几何精度载荷保障设计Table 5 High-geometric precision payload insurance design
2.3 正样阶段定位精度保障控制和结果
正样阶段提升定位精度工作的主要目的是提出各项指标的测试方法和测试时机,其保障链的传递环节为控制目标—测试(控制)方法—控制结果。对无法进行测试的开展仿真分析和复核复算工作,进行过程控制,技术流程如图3所示。
结合卫星的研制流程,卫星在正样阶段开展的高精度测试和分析保障,主要分为高精度定姿、定轨保障设计、高稳定结构保障设计和高几何精度载荷保障测试3个方面。具体项目见表6、表7和表8所示。

图3 正样阶段提升定位精度工作技术流程Fig.3 Technology flow chart of geo location upgrade in flight model phase

表6 高精度定姿、定轨保障测试Table 6 High-precision attitude and orbit determination test
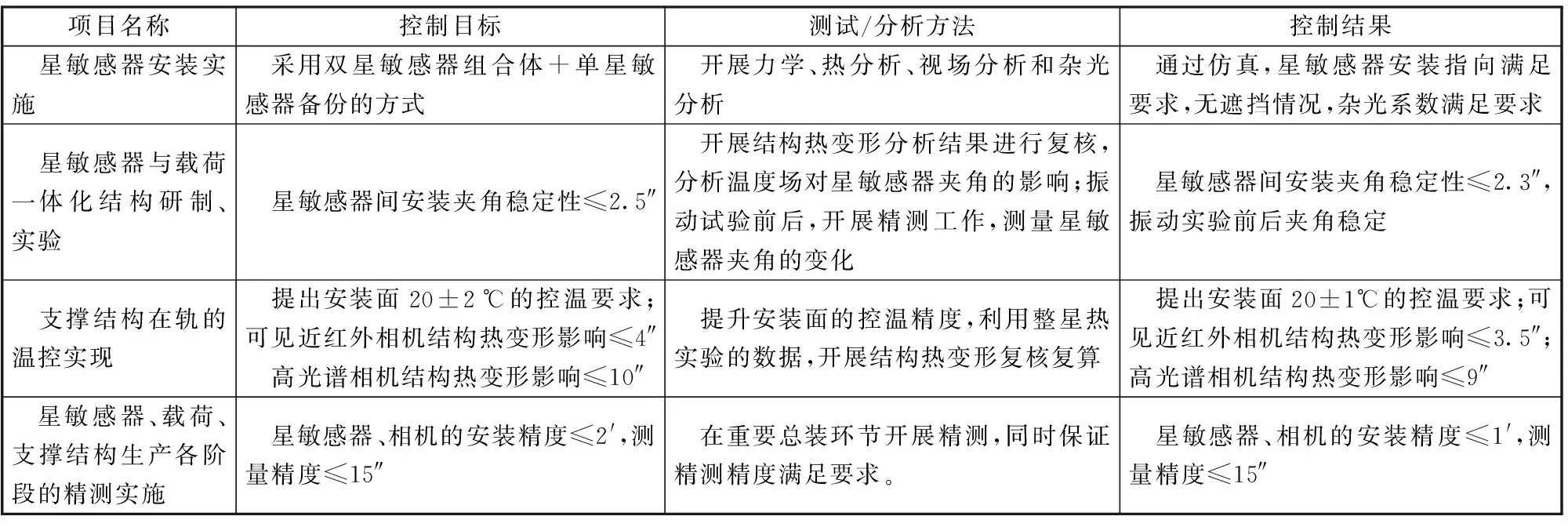
表7 高稳定性结构保障测试Table 7 High-precisionstructureinsurance test

表8 高几何精度载荷保障Table 8 High-geometric precision payload
通过正样阶段控制,得到最终控制(测试)结果。利用控制数据,按照表1和表2的方法对定位精度再次进行复算,得到可见近红外相机和高光谱相机的最终定位精度分别为21 m(CE90)和85.2 m(CE90),满足研制总要求的指标要求。
3 定位精度在轨验证结果
2020年4月到7月,对资源一号02D卫星(不同侧摆角、不同时间、不同轨道、不同地形、清晰、成像质量良好)VNIC和AHSI相机进行了定位精度的在轨测试,以全球公开的SRTM30数据为高程基准进行外部精度的测试评估。获取了资源一号02D卫星两台相机共60景数据进行在轨测试,其中可见近红外相机34景,高光谱相机24景。拍照地区覆盖东北、华北、内蒙古、西北等北方地区以及南方地区。
在轨测试方法是在经过系统几何校正的图像上,计算控制点(GCP)的图像坐标,并算出GCP的图像坐标和实际地理坐标的差值,计算多景图像GCP位置误差值的均方根误差作为图像的定位误差[7-8]。
从定位精度测试结果可知,对不同侧摆角、不同时间、不同轨道、不同地理位置的测试数据,采用公开的SRTM30高程数据进行几何校正[9],资源一号02D卫星VNIC相机几何定位精度大约为19.2 m(CE90),AHIS相机几何定位精度为87.9 m(CE90),且卫星侧摆角和地形起伏对几何定位精度的影响较小,总体指标满足研制总要求的要求。通过实测值和定位精度控制分析比较来看,两者的数值较为接近,证明了分析方法的有效性和正确性。
4 结束语
资源一号02D卫星在几何定位精度设计控制过程中,是按照测绘卫星的标准执行的。本文根据资源一号02D卫星提出的高定位精度的要求,在分析中误差和圆概率误差转换关系的同时,提出了一种定位精度保障链的传递分析模型,该方法可以较完整地梳理出对定位精度各项影响因素的传递环节,保证分解和控制的全面性,并可在各个环节中考虑误差影响的权重,并与研制流程相结合,找到影响定位精度的关键环节,从而提高控制的精准度,通过卫星在轨测试表明,该方法控制有效,可以作为其他型号的参考。后续根据在轨型号,将进一步优化模型和误差分析方法,进一步提高控制的精度。
