基于STM32的智能物料搬运小车
2020-12-24林健全刘浩捷孙伟卿
林健全 刘浩捷 孙伟卿
摘 要: 设计了一种基于STM32F103ZET6处理器的智能物料搬运小车。该小车使用红外传感器和激光模块进行循迹和定位,软硬件双重消抖;通过麦克纳姆轮实现全方位移动;使用openmv摄像头来读取信息和识别物料;通过六自由度机械臂配合空气泵抓取和放置物料,其中摄像头配合机械臂实现PI闭环抓取和放置;超声波模块完成避障;降压DC-DC变换器稳定各个模块的工作电压。经试验验证,该小车能够很好的完成信息读取,物料的抓取,搬运和放置任务。
关键词: 智能物料搬运小车;STM32;软硬件双重消抖;Openmv;PI闭环算法
中图分类号: TS958.2+8 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.07.005
本文著录格式:林健全,刘浩捷,孙伟卿. 基于STM32的智能物料搬运小车[J]. 软件,2020,41(07):27-30
STM32-based Intelligent Material Handling Trolley
LIN Jian-quan1, LIU Hao-jie2, SUN Wei-qing1
(1. University of Shanghai for Science and Technology School of Mechanical Engineering,Shanghai 200093;2. University of Shanghai for Science and Technology School of Optoelectronic Information and Computer Engineering, Shanghai 200093)
【Abstract】: This paper designs an intelligent material handling trolley based on the STM32F103ZET6 processor. The car uses infrared sensors and laser modules for tracking and positioning, and dual deshake of software and hardware; it can be moved in all directions through Mecanum wheels; it uses Openmv cameras to read information and identify materials; and it uses a six-degree-of-freedom robotic arm with an air pump grabbing and placing materials, the camera cooperates with the robotic arm to realize PI closed-loop grasping and placing; the ultrasonic module completes obstacle avoidance; the step-down DC-DC converter stabilizes the working voltage of each module. The test verified that the trolley can complete the tasks of reading information, grasping, handling and placing materials.
【Key words】: Intelligent material handling trolley; STM32; Software and hardware dual debounce; Openmv; PI closed-loop algorithm
0 引言
智能小車是轮式移动机器人的一种,其内容涵盖机械、汽车、电子、自动控制、计算机、传感技术等多个学科的知识领域,是目前电子设计的一个热门话题。该智能物料搬运小车集合传感器检测技术[1],智能控制理论技术[2]以及电力拖动技术为一体,能够实现各种复杂的任务。该小车可以在人无法工作“特别危险区域”,人无法直接接触的隔离区域下准确,稳定的完成物料的搬运任务。代替人在“危险地区”进行作业,提高了物料搬运的安全性,以及提升了工作的效率。
1 系统总体方案
1.1 系统设计要求
要求设计一个智能物流小车,小车能够在没人的情况下自行完成物料搬运工作。主要有以下两方面的内容:(1)机械臂配合机械臂能够正确的读取任务信息;(2)小车能够准确的完成物料搬运工作。同时小车上的显示屏能够显示物料搬运信息,出现故障时故障的原因。
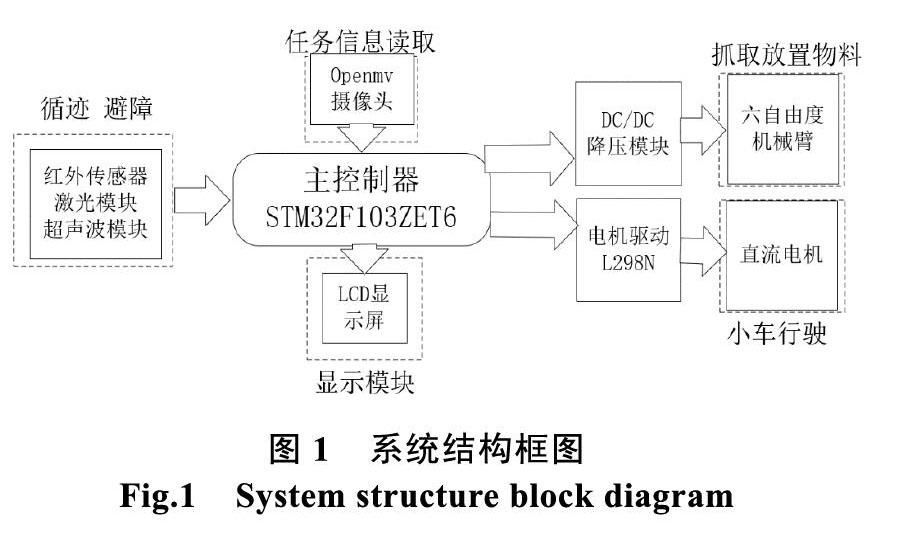
1.2 系统结构框图
该智能物流小车系统的结构框图如图1。该系统由主控制器[3],红外传感器,激光模块,直流电机,摄像头,机械臂,超声波,降压DC-DC模块 构成。
2 主要硬件设计
2.1 系统控制器模块
控制器是整个系统的核心,本系统使用STM32F103ZET6开发板。该型号单片机相比于51系列单片机,运算速度更快,有更多的与外设的通信串口与I/O口;一共21路AD转换,带有标准3.3 V输出电压,PWM发生器等。
2.2 系统供电电路设计
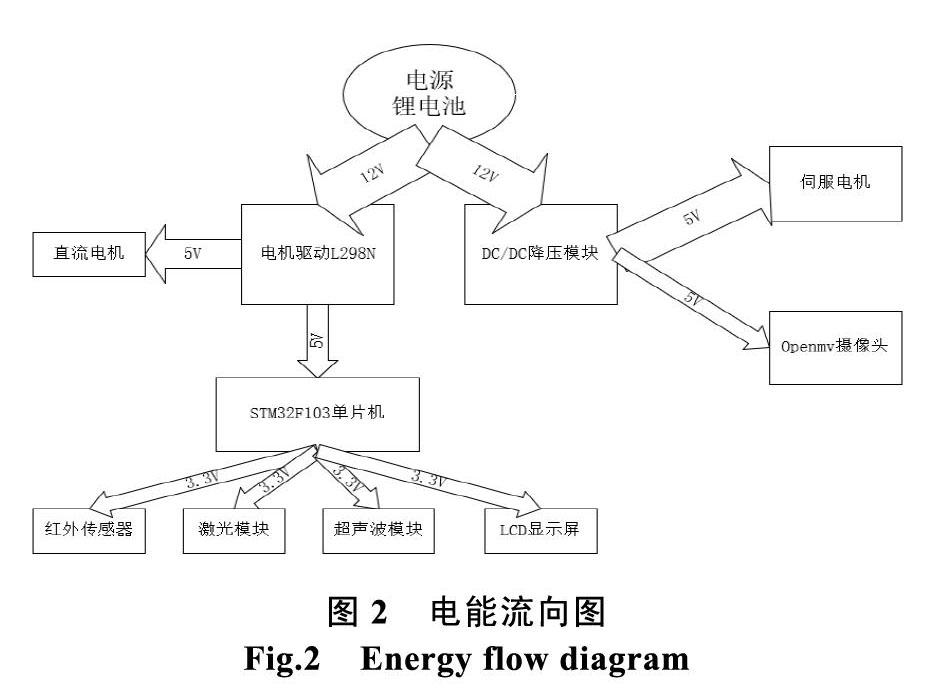
整个系统由12 V的锂电池进行供电。小车行进的直流电机和机械臂上的伺服电机在工作时均需要较大的电流,所以采用并联的方式,首先将DC/DC降压模块和电机驱动L298N并联,由锂电池直接供电。然后,DC/DC降压模块5 V输出给机械臂上的伺服电机和Openmv摄像头供电,同时电机驱动L298N的5 V输出接到单片机的5 V上,输出直接接直流电机。最后,由单片机引出3.3 V输出给红外传感器,激光模块,超声波模块等传感器以及LCD显示屏。系统电能流向图如图2所示。

2.3 电机驱动L298N
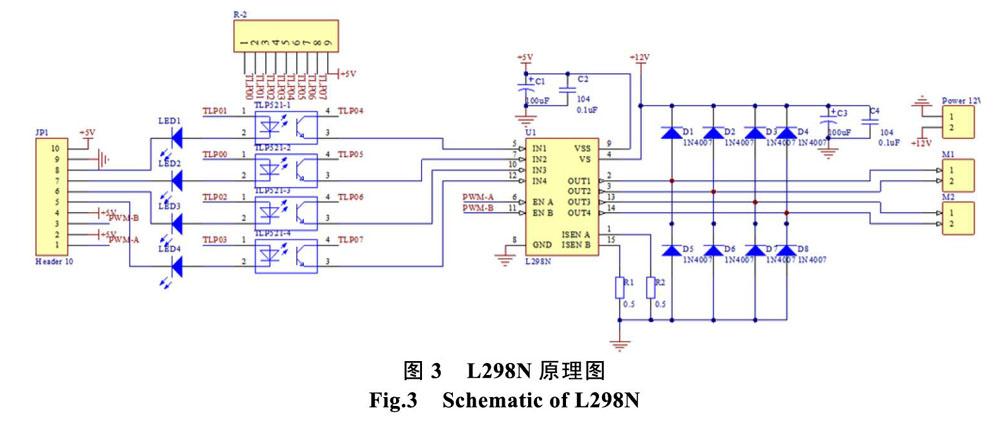
电机驱动L298N[4]是用来驱动两相电机的。L298N能够接受标准的TTL信号[5],其原理主要是通过两个H桥将单片机的PWM信号进行放大从而驱动电机。其驱动原理图如同3所示。IN1, IN2, IN3, IN4为单片机PWM信号的输入;EN A和EN B分别是两相的两个使能端,低电平有效;OUT1和OUT1,OUT3和OUT4分别接两相电机。
2.4 降压DC/DC模块
因为电源提供的电压为12 V,而伺服电机的工作电压为5 V,且机械臂需要更大的电流,所以为了降压增流使用降压DC/DC模块。DC/DC降压模块有一个12 V的固定输入,有一个可调电阻可以调节输出的电压,调节范围为5 V——输入电压,其主要的电路结构为一个Buck电路。
3 软件设计
3.1 程序设计总流程图
系统采用模块化程序设计[6]。智能物料小车从上电初始化开始,先读取任务码,用摄像头确定物料所需要放置的位置然后计算出行进路线,控制小车行驶,最后通过机械臂和摄像头准确放置物料。程序设计流程图如图4。
3.2 小车循迹定位程序
通过激光模块和红外传感器实现小车的循迹和定位。实验场地如图4,以出发区的点为原点,二维码任务板所在位置为X轴,最上方垂直于任务板所在直线为Y轴建立直角坐标系四个激光模块通过测量离场地边缘挡板的距离来得到小车目前所在的坐标;车上的八个红外传感器的通过场地黑白线不同的光强反馈不同的信息给单片机,确定小车在网格的具体位置以及行驶的距离。
3.3 任务码读取及颜色识别程序
为确保系统稳定性,调试的便利性openmv会每完成一个步骤,进行文件读写一次,进行记录。系统开始工作后,进行摄像头串口初始化,根据感光元件对颜色LAB参数进行微调,从而确保读取颜色准确;然后进行检测二维码,若长时间未检测到二维码则会通过串口交互,使小车移动;之后进行识别颜色,完成识别后对颜色进行编码,通过串口将颜色信息发送;最后进行实时检测物块与机械臂的距离,发送误差用于主控进行PI[7]闭环控制。
4 难点及关键技术
4.1 红外传感器配合麦克纳姆轮[8]循迹
控制物料小车稳定形式的难点在于机械臂的长度较长,并且在行驶过程中一直抓取着物料,若地面轻微的不平整或者小车的大幅度动作变化都会导致物料小车重心的变化从而增大物料脱落的可能性。
所以考虑使用麦克纳姆轮进行全方位的移动,能避免小车进行转向,掉头等大幅度操作。麦克纳姆轮的工作原理是通过四轮之间的速度差来改变小车的速度和行进方向,其基本运行原理图如图6。小车车身的八组红外传感器按照顺时针分别命名为zero~eight,红外传感器遇到黑线反馈1,其余反馈0,通过zero~eight的值可以确定小车车身在路线上的情况,再结合麦克纳姆轮的运动学分析,计算出小车接下来各个轮胎的速度,控制小车循迹。
4.2 软件延时+硬件遮光实现双重消抖
红外传感器在按照反射光强不同进行循迹时,会受到外界光照强度变化所带来的影响。并且小车行进过程中,车身重心的变化导致红外传感器与地面的距离也会影响红外传感器的灵敏度。所以考虑采用软件延时+硬件遮光的双重消抖来使红外传感器反馈更加准确。在红外传感器发射和接收管的外表面均用黑色遮光罩进行挡光,不论在室外环境下的白天和黑夜,光照强度发生变化,均不会对红外传感器的反馈造成干扰;在红外传感器判断时,因为重心改变造成的抖动持续时间极短,加入一个10 ms左右的延时函数再进行第二次判断,就能降低红外传感器的灵敏度,极大程度的降低重心改变带来的干扰。
4.3 Openmv配合机械臂PI闭环抓取和放置物料
Openmv作为图像识别[9]传感器,分别使用颜色识别和特征点检测算法[10],识别物块和机械臂,从而达到定位的目的。而后计算二者的欧氏距离,进行摄像头畸变补偿,将结果通过串口发送,利用PI算法进行机械手控制,同时继续运行,直到误差为极小值,而后进行抓取。控制结构图如图7所示。
5 结语
本文设计了一种基于stm32f103ZET6处理器的智能物料搬运小车。该智能物料小车有红外,激光模块,超声波,openmv等传感器,机械臂,直流电机,麦克纳姆轮等可控制器件。该智能物料搬运小车能够独立完成任务码识别,物料的抓取,运输和放置一系列任务;openmv读取任务码和机械臂的抓取放置均为PI算法闭环控制。经图4测试场地进行试验,能够稳定,准确的完成物料搬运任务。对于在人无法之间参与的危险地区和需要隔离的环境,该智能物料搬运小车能够发挥极大的作用。
参考文献
-
罗印. 基于手机加速度传感器的测距系统设计与实现[J]. 软件, 2015, 36(2): 73-76.
-
刘明. 计算机技术应用下的电气自动化控制系统设計分析[J]. 软件, 2018, 39(6): 170-173.
-
程小艳. 嵌入式STM32F107VCT6微处理器接口模块开发及应用研究[D]. 合肥工业大学, 2012.
-
殷留留, 韩森, 王芳, 等. 基于L298N的直流电机调速系统的设计与应用[J]. 信息技术, 2017(06): 104-106+111.
-
赵洁, 饶增仁, 郭明超. TTL逻辑电平检测电路研究与设计[J]. 甘肃高师学报, 2016, 21(03): 15-16.
-
汪友生. 电类非计算机专业C语言程序设计实验教学研究[J]. 软件, 2018, 39(3): 99-101.
-
范云飞, 任小洪, 袁文林. 基于并联PID 的四旋翼飞行控制策略设计[J]. 软件, 2015, 36(4): 37-39.
-
陈博翁, 范传康, 贺骥. 基于麦克纳姆轮的全方位移动平台关键技术研究[J]. 东方电气评论, 2013, 27(04): 7-11.
-
侯贵洋, 赵桂杰, 王璐瑶. 草莓采摘机器人图像识别系统研究[J]. 软件, 2018, 39(6): 184-188.
-
侯晓丽. 基于局部特征的图像匹配算法研究[D]. 西安电子科技大学, 2014.
