分析滚珠螺杆型单轴机械手臂应用要领
2020-12-23闫京
闫京
摘要:本文首先简要介绍了单手机械手臂,并以滚珠螺杆型单轴机械手臂为例,简述了其结构及其零部件的选型计算,同时针对机械手臂的安装方式、安装问题及解决方案也进行了说明,最后介绍了机械手臂的适用工况,为单轴机械手臂的实际生产提供理论指导。
关键词:机械设计;单轴机械手臂;滚珠螺杆;
0引言
随着工业技术的蓬勃发展,单轴机械手臂的应用领域也越来越广泛。其原因是单轴机械手臂的结构简单,根据不用的工况选用不同的型号可以应对不同的实际工程问题[1]。
单轴机械手臂(Single AxisRobot)在国内也被称之为电动滑台,线性模组,单轴驱动器,单轴机器人等。单轴机械手臂通过不同的组合样式可以实现多轴组合,实现直角坐标机械手,XYZ多轴机械手臂(XYtable)等应用。
从传动结构上来看,目前的单轴机械手臂主要有滚珠丝杠传动和同步齿形带传动,直线电机传动等方式。从成本和使用范围来说,滚珠丝杠式和同步皮带式应用比较广泛。由于结构原理不同,產品的性能和使用场合也有所差别[2-3]。
单轴机械手臂一般通过滚珠丝杠或者同步齿形带传动,以精密直线导轨作为导向机构,用以实现单一方向的搬运,定位,移载,取放,检测等功能。在自动化领域应用广泛。单轴机械手臂配合伺服电机或者步进电机,可以实现不同应用场合下的精确定位。作为现代工业模块化和集成化理念的不断应用,单轴机械手臂的出现无疑减轻了自动化生产线和自动化设备开发的时间和效率。
单轴机械手臂虽然在实际生产中给加工等带来了便利,但是从单轴机械手臂的设计到实际安装应用和维修等一系列过程,如何做到精准合理,就目前而言,还存在很多需要深入研究。本文就典型的滚珠螺杆型单轴机械手臂的理论设计及实际应用做简要阐述。
1滚珠螺杆型单轴机械手臂的设计
1.1滚珠螺杆型单轴机械手臂的结构设计问题
单手机械手臂的结构相对简单,主要可以分为9个部件,分别为马达、联轴器、固定端轴承、底座、滑台、线性滑轨、螺母、滚珠螺杆和支撑端轴承,如图1所示。在工作时,构件5-滑台的作用是承重,而构件8-滚珠螺杆的作用是通过螺纹作用推动构件5-滑台使其运动,至于构件8-滚珠螺杆的运动是构件1-马达通过构件2-联轴器来实现的。整体构架需要机架支撑,构件8-滚珠螺杆的自由旋转运动需要通过轴承实现,因而联接构件2-联轴器和构件8-滚珠螺杆的轴承称为固定端轴承,而另一端仅仅起到支撑作用的轴承称为支撑端轴承。
滚珠螺杆型单轴机械手臂的运动主要依靠滚珠螺杆的旋转实现,考虑到实际承重和共振等因素,需要限定滚珠螺杆的最高转速。通常情况下,为了避免共振的问题,需要实际安全系数(0~1.0)降低转速,一般采用比较大的安全系数0.8,则滚珠螺杆实际过程中的许用转速可以表示为
式中,np为实际许用转速;Mf为滚珠螺杆组装形式系数;dr为滚珠螺杆的直径;Lr为固定端轴承与支撑端轴承之间的螺杆跨距。另外由公式(1)可知,许用转速和螺杆跨距成正比,而且具有指数关系,影响单轴机械手臂的有效行程范围。因此在选择型号的时候,首先要依据实际工况运转过程中需要的工作转速来确定螺杆的转速,在这个过程中还需要将螺杆导程和转速进行对应的转换换算,进而确定跨距和行程。通常而言,在选用单轴机械手臂的时候,产品所提供的有效行程往往符合工况需求,但是考虑到共振的问题,螺杆的许用转速会受到限制,尤其是行程超过规定越长,共振造成的影响也就越大,也就是说需要考虑的安全系数也就越小,螺杆的许用转速下降的越多。如果实际工况需求长行程的滚珠螺杆型单轴机械手臂型号,可以在跨距中间增加螺杆支撑座,保证其结构刚度,分散其受力,有效加长螺杆的总长度。
1.2滚珠螺杆型单轴机械手臂的使用寿命问题
产品的投入使用不仅需要考虑实用性,还需要考虑其使用寿命。但就滚珠螺杆型单轴机械手臂来说,其使用寿命和工作负载息息相关。构件8-滚珠螺杆、构件6-线性滑轨、构件3-固定端轴承和构件9-支撑端轴承中涉及到滚珠的使用,其具体的使用寿命均不同。由机械设计基础原理可知,轴承的使用寿命和基本额定动载荷和当量动载荷有关,因此,在考虑使用寿命时,首先需要考虑机械结构的承载问题。在实际中,大多数的单轴机械手臂在出厂时会有厂商给予的既定寿命,但是给定的标准通常为规定行程和负载。这里额外需要值得关注的是,厂商所给定的负载标准不是基于整体的机械结构强度,而是以行程寿命值来量化的。
在考虑负载时,以构件6-线性滑轨的基本额定动载荷为设计基础,因而线性滑轨的使用寿命可有如下表示
式中,L为线性滑轨的使用寿命;fh为材料的硬度系数;C为轴承的基本额定动载荷;ft为温度载荷系数;Pc为当量动载荷;fw为负载系数。
2滚珠螺杆型单轴机械手臂的应用
2.1安装形式
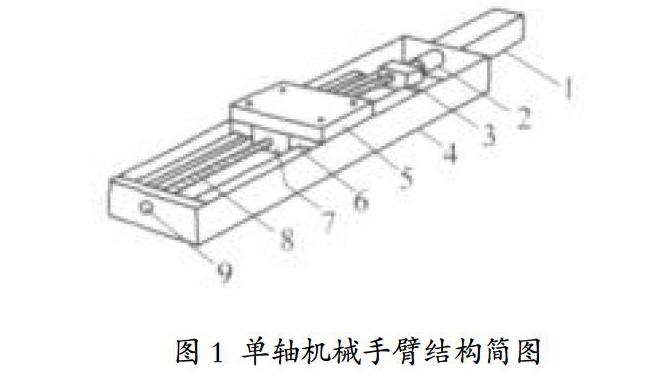
单轴机械手臂的安装控件往往受到限制,因此合理的进行安装才能保证单轴机械手臂的正常使用。如图2所示,通常情况下的安装方式可以分为四种:水平安装、侧挂安装、倾斜安装和垂直安装。在水平安装时需要考虑单轴机械手臂的刚性,避免受力不均、结构悬空、底座不平等问题。在侧挂安装需要注意滑轨的承载问题,保证其各个方向的力矩在规定范围之内。倾斜安装时因为单轴机械手臂和水平面成一定的角度,所以需要考虑负载的空间分量,一般情况下,产品在制造时已经考虑到,按照相对应的标准安装即可。安装最为困难的是垂直安装,因为此时的负载均由螺杆支撑,导致大部分载荷都集中在固定端轴承上,严重影响固定端轴承的使用寿命。
2.2常见问题及解决方案
单轴机械手安装底面平面度不达标。单轴机械手安装底面平面度过大,会导致电动滑台底面被强行锁附,导致滑台底面,直线导轨和滚珠丝杠发生强弯变形。轻则会使单轴机械手运行阻力加大,重则有可能是电动滑台无法运行,急剧缩短电动滑台寿命。根据单轴机械手的精度等级,一般普通级对安装底面的平面度要求应小于0.05mm/m。对于精密级,安装底面的平面度应小于0.02mm/mm。
单轴机械手底部固定螺钉锁附顺序不对。单轴机械手底部固定螺钉应遵循先中间,后两端,依次锁紧的原则。若先将两端锁死,会导致由于形变产生的拱起形变量无法消除,从而导致直线导轨不能顺畅运行,降低行走平行度和直线度精度。单轴机械手电机轴和丝杠轴端不同心。虽然联轴器能消除一定的偏心度,但如果单轴机械手丝杠轴端和电机轴的同心度跳动值超出联轴器的允许范围,则会加速联轴器的损坏,导致联轴器异响,或弹片发生断裂。应该尽量避免。
单轴电动滑台同步带张紧过松或过紧。电动滑台同步带涨紧度要保持适中,皮带张力过紧,会使同步轮和同步带张力过大,并产生异响。皮带张力过松,会使传动过程中产生间隙,降低精度,严重时会产生跳齿。同步带涨紧程度一般通过涨紧力和挠度来确定,测量方法为:使用推力计下压皮带中点垂直方向,施加一定大小的安装力时,测量所产生的挠度值。对应不同中心距和皮带规格的参考值。单轴电动滑台同步带安装未对齐。同步帶型传动的电动滑台,或者马达侧面安装型电动滑台,应该使同步轮保持平齐,否则,会导致皮带跑偏,进而皮带边沿和同步带挡边发生摩擦,同步带短时间内就会损坏和断裂。
机械手臂(电动滑台)悬臂轴行程过长,悬出长度过大。机械手臂的悬臂长度过大,会造成导轨的容许力矩过载,在不同的加减速度下,收束时间会发生变动。收束时产生的振动最终被电动滑台吸收,长时间振动会造成导轨寿命缩短。机械手臂/电动滑台负载超出使用范围。机械手臂选型时,除了参照选型手册的可搬运负载数据,还应校核动态容许力矩,加减速变动,以及悬臂长度等造成的影响,并预留足够的安全系数[4-5]。
2.3应用环境
滚珠螺杆型单轴机械手臂属于精密机械,在选用时需要考虑实际工作环境,根据不同的工作环境可选择不同类型的机械手臂,如表1所示。
3结论
单轴机械手臂应用广泛,属于机电一体化,涉及到机械、电气、控制等,要合理的使用需要深入了解其结构组成及其使用准则,加强对实际机械手臂的实际应用。
参考文献
[1] 杨松楷. 滚珠螺杆型单轴机械手臂应用要领[J]. 金属加工(冷加工), 2010(06):34-37+66.
[2] 韩阳阳, 李亚芹. 高速滚珠丝杠进给系统机械性能分析[J]. 机械工程师, 2007(06):31-32.
[3] 姜鑫, 王均馗. 基于MATLAB/Simulink高速滚珠丝杠进给系统机械模型的仿真与分析[J]. 机械制造与自动化, 2011(03):97-100.
[4] 雷永志, 沈义伦, 刘建. 利用机器人单轴手臂测皮带长度的装置.
[5] 胡金华, 傅江成, 陈丽珍, 等. 一种刚性强度高的单轴机械手.
