桩柱一体化施工桩身空间姿态精确定位技术
2020-12-23李铭韦港荣
李铭 韦港荣


摘要:文章依托钦北高速公路改扩建工程装配式桥梁桩柱一体化工艺试验项目,结合桩柱一体化施工桩身空间姿态定位的现场实践,对桩身空间姿态定位方法进行了探讨,阐述了如何提高桩身空间姿态定位的精度。
关键词:桩柱一体化;桩身空间姿态;精确定位;极坐标法;平距法
中图分类号:U445.4A351264
0 引言
随着我国经济的飞速发展,交通压力越来越大,原有的高速公路无法满足当前的交通运输压力,需要在原有的基础上进行改扩建施工。常规桥梁下部结构需要在墩和柱之间现场浇筑承台,该方式不但会占用已有道路,而且会影响快速施工进度。为降低改扩建工程对已有交通的影响,对施工持续时间以及施工作业面提出了较高的要求。在讲效率的今天,桩柱一体化桥墩取消了承台,桩柱直接连接,从而达到快速施工桥梁的效果,通过该方式可以减少现场作业环节,缩短施工工期,提高工程品质,降低交通的影响。
1 工程概况
兰州至海口高速公路广西钦州至北海段改扩建工程位于广西钦州市及北海市境内,项目分为主线兰海高速钦州至山口段及北海支线。本项目桥梁设计中的大部分桩基为端承桩,具有桩基不深、桩柱不高的工程特点,因此下部结构可以很容易地实现装配化施工。为了验证“桩柱一体化”装配式工艺构想的可行性,本文特进行本次试验。试验采用2根直径为1.3 m的管桩桩柱,壁厚0.3 m。每根试验桩均由三段管桩连接组成,长度组成为(12+12+5)m,桩柱接头在地面上1 m的位置,進行盖梁吊装工艺测试。盖梁在墩顶处设置24根6 cm灌浆镀锌波纹管管桩采用C70高强混凝土,采用C50混凝土预制的盖梁。
2 精确定位的重要性
桩柱一体化施工中的桩基和桩柱采用工厂预制生产,桩基成孔后植入预制桩,桩柱连接后,再进行预制盖梁吊装,桥梁的桩基、桩柱和盖梁采用全装配式施工。常规桥梁下部结构需要在墩和柱之间现场浇筑承台,浇筑承台时可以进行偏位、高差调整,而桩柱一体化施工去掉需要现浇的承台,桩柱直接连接,可以进行偏位、高差调整的空间被挤压。因此,对桩柱一体化施工桩身空间姿态定位的精度,要求就变得更加严格。桩身精确定位是桩柱一体化施工成功与否的关键,如何提高桩身空间姿态的定位精度,是本篇文章所要研究的主体。
3 桩身空间姿态定位方法
3.1 控制网建立
3.1.1 控制网的原理
根据施工现场条件,利用高精度全站仪和数字水准仪同时对若干控制点进行观测,获取各控制点间边长、角度和高程数据,进而解算控制点的坐标和高程,最终获取控制网成果,用于指导现场施工。
3.1.2 控制网的布设
在施工现场布设控制点,控制点设置在稳固、可靠、不易破坏且便于测量的位置,既要考虑满足全站仪观测的需要,又要考虑适合桩柱施工对控制点的要求。从施工现场外GPS控制测量确定的点引入,施工现场内、外平面控制宜以边连接进行联测,高程控制宜以闭合导线进行往返测量,以提高桩身空间姿态定位的精度。
为方便控制观测,结合施工现场,平面和高程控制点为同一测点,以施工现场外GPS控制点KZ1和KZ2为起算点,在施工现场内布设2个控制点,考虑到角度和垂直度的控制,在沿盖梁轴线方向布设KZ4控制点,垂直于盖梁轴线方向布设KZ3控制点。
3.1.3 观测方法及精度
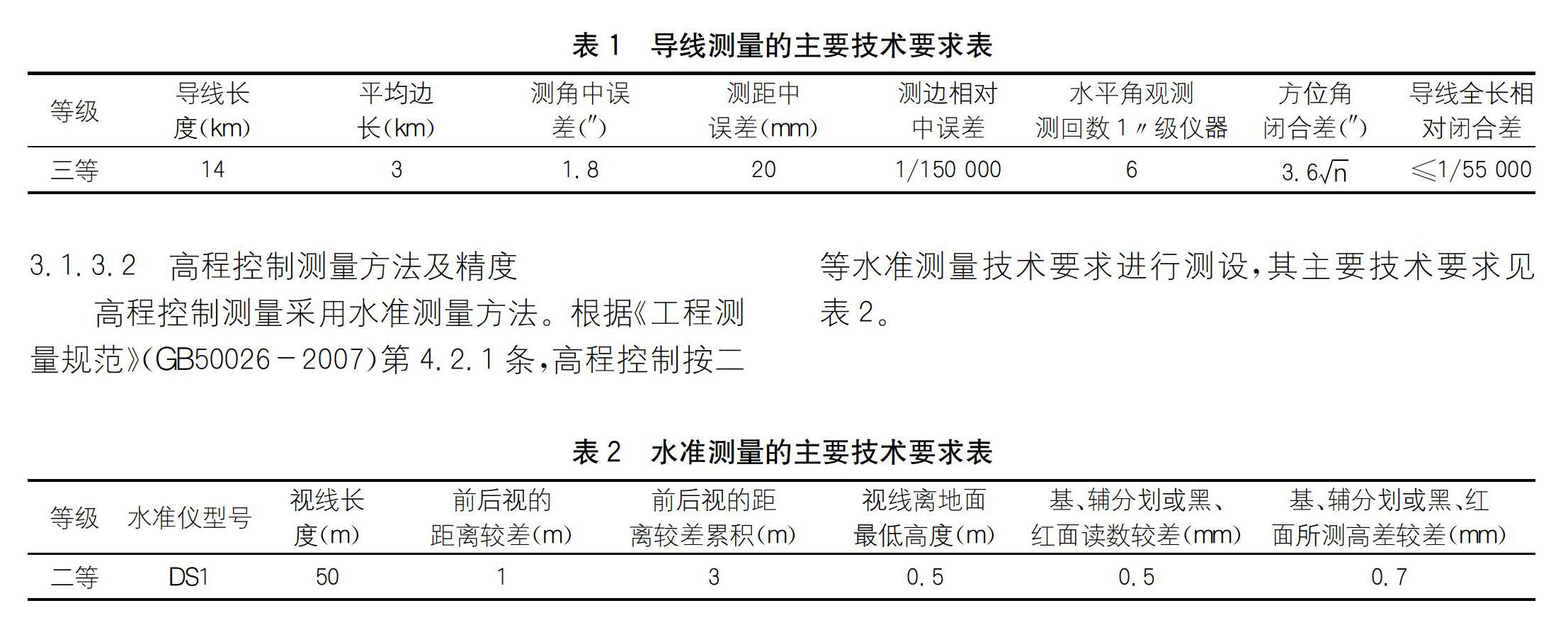
3.1.3.1 平面控制测量方法及精度
平面控制测量方法为导线测量,根据《工程测量规范》(GB50026-2007)第3.3.1条,平面控制按三等技术要求进行测设,其主要技术要求见表1。采用高精度徕卡全站仪TS50进行测量。TS50具有自动目标搜索、自动照准、自动跟踪、自动测量和自动记录等功能。水平角采用方向观测法,边长采用电磁波测距法。
3.1.3.2 高程控制测量方法及精度
高程控制测量采用水准测量方法。根据《工程测量规范》(GB50026-2007)第4.2.1条,高程控制按二等水准测量技术要求进行测设,其主要技术要求见表2。
3.1.4 观测结果
选择较好的气候条件对控制点进行观测,经评测各项指标均满足《工程测量规范》(GB50026-2007)中规定的相关要求,平面和高程控制测量结果分别见表3。
3.2 桩位放样
3.2.1 桩位放样的原理及必要性
桩位放样是把设计图纸上桩柱的平面位置和高程用一定的测量仪器和方法测设到实地上,桩位放样分为控制桩和护桩放样,护桩是在控制桩遭受破坏后进行引桩,使得原控制桩迅速准确地予以恢复。
桩位放样精确与否是整个桩柱一体化施工桩身空间姿态定位精度控制的关键。
3.2.2 桩位放样的方法
根据设计图对控制桩位进行实地放样,同时给出护桩的位置,护桩为木桩(3×3 m),桩顶钉钉,高度为80 cm,埋入地下45 cm,并用砂浆或素混凝土进行保护,沿桩中心呈“十”字型引出四个桩位点用来控制桩位,作为单桩护桩。
为保证桩位的精确度,桩位放样采用双测站极坐标法,按《工程测量规范》(GB50026-2007)第3.3.1条,平面控制按三等技术要求进行测设。
测站1:全站仪TS50架设于控制点KZ3处,以控制点KZ2为后视点,分别对1个控制桩和4个护桩进行测量,共进行6个测回的观测。
测站2:全站仪TS50架设于控制点KZ4处,以控制点KZ2为后视点,分别对1个控制桩和4个护桩进行测量,共进行6个测回的观测。
3.2.3 桩位放样结果
桩位放样采用高精度全站仪TS50进行测量,测点布置如图1所示,测量结果见表4。
3.3 桩身空间姿态实时监测
3.3.1 监测原理
桩柱一体化施工对桩柱空间位置的施工精度提出了较高的要求。由于涉及接桩,若还是按照常规的方式将很难保证施工精度。
施工需要在下部結构拼装过程中进行实时跟踪定位,为了精确定位,需要对桩柱安装过程进行实时监控。具体需要在下部结构安装过程中,在预制桩柱上安装棱镜及反射片(如图3所示),采用高精度全站仪极坐标法和平距法实时测量桩柱安装施工桩身的空间姿态。通过控制桩柱中心坐标、垂直度及方位的监测结果来实时调整桩身空间姿态,从而确保桩柱精确定位。
3.3.2 测点布设
在即将施工的桩柱顶中心及盖梁轴线方向侧面安装棱镜,在靠近桩顶、底表面分别沿盖梁轴向方向和垂直盖梁轴向方向上安装反射片。
3.3.3 监测方法
3.3.3.1 全站仪极坐标法
(1)全站仪极坐标法通过测量桩顶中心和表面(盖梁轴线方向)控制点的平面坐标和高程来确定桩的平面坐标、高程及方位角。具体检测步骤如下:
①检测方向
以盖梁轴线为横向,垂直盖梁轴线方向为纵向。
②测站选择、后视基准点设置
全站仪架设于盖梁轴线方向KZ4处,以KZ2为后视点。
③平面、高程和方位角测量
调平仪器,输入温度、气压、湿度等参数后,分别照准桩顶中心和表面(盖梁轴线方向)控制点进行坐标测量得到测点平面坐标和高程,如图2所示。
(2)桩柱定位调整
①确定桩柱中心位置:通过全站仪连接电脑实时测量桩顶中心点的平面坐标和高程,电脑自动计算出桩中心点实测坐标与设计坐标的偏差,实时进行桩身中心位置调整。
②确定桩柱方位角:通过全站仪连接电脑实时测量桩顶表面(盖梁轴线方向)测点的平面坐标,电脑通过桩顶中心点与表面(盖梁轴线方向)测点的坐标计算出桩柱实时的方位角,实时进行桩柱方位的调整。
3.3.3.2 全站仪平距法
(1)全站仪平距法通过测量盖梁轴线方向和垂直轴向方向上桩柱上部表面和下部表面至全站仪的水平距离差值来确定竖直度。具体检测步骤如下:
①检测方向
以盖梁轴线为横向,垂直盖梁轴线方向为纵向。
②测站选择、后视基准点设置
对架设于盖梁轴线方向KZ4处的全站仪进行平面、高程和方位角测量后自动转到竖直度测量,以控制沿盖梁轴向方向上的垂直度;将另一台全站仪架设于垂直盖梁轴线方向KZ3处,以KZ2为后视点进行垂直度测量,以控制垂直盖梁轴向方向上的垂直度。
③竖直度测量
架设于KZ3处的全站仪分别照准垂直盖梁轴向方向桩柱表面上部和下部测点进行水平距离测量,得到测点至仪器的平距和高程;架设于KZ4处的全站仪分别照准盖梁轴向方向桩柱表面上部和下部测点进行水平距离测量得到测点至仪器的平距和高程。如图3和图4所示。
(2)垂直度调整
通过全站仪连接电脑实时测量桩柱轴线方向和垂直轴向方向桩柱上部表面和下部表面测点,电脑自动计算桩柱的实时垂直度,以配合桩柱顶中心位置和方位,实时进行桩柱空间姿态调整。
3.3.4 监测结果
通过对桩桩空间姿态进行精确定位,定位结果见表5。
从控制结果可以看出:x、y向位置偏差较小,ZK2在z向偏差有9 cm,主要是因桩底座浆过厚导致,拼装盖梁时需要截桩;桩柱垂直度和方位角偏差较小。施工质量和偏差均在可控范围内。
4 结语
桩身空间姿态定位技术是桩柱一体化施工中的一项技术性难点。在施工定位中存在诸多的不确定性因素,桩身空间姿态的精确定位会直接影响到盖梁的拼装,从而影响到整个桥梁的施工精度。为保证桩身空间姿态定位的准确性,将理论和实际现场相结合进行论述,对桩身空间姿态定位进行分析,通过现场定位测量的数据和盖梁拼装结果来看,证实了桩身空间姿态精确定位的合理性,可指导日后桩柱一体化工程施工。
参考文献:
[1]GB50026-2007,工程测量规范[S].
[2]曾广辉.施工放样中护桩、引桩方法[J].西部探矿工程,2010(9):31.
[3]辛金珠.老安山隧道洞内控制网的建立及其贯通精度[J].测绘通报,2018(3):150-151.
收稿日期:2020-05-10
