基于模糊神经网络PID的水轮机组频率控制
2020-12-23陈德海朱正坤王超
陈德海 朱正坤 王超

摘 要: 在水电站发电过程中,频率控制至关重要,但是对于这种非线性、时变性的复杂控制系统来说,传统PID控制方法存在参数整定困难,控制效果不佳的缺陷。因此在传统的PID算法、模糊控制以及神经网络控制算法的基础之上,提出一种模糊神经网络PID联合控制算法来优化水轮机调节系统的PID参数,并应用到水轮机调节系统当中,与传统PID控制器进行对比,结果表明模糊神经网络PID控制算法对水轮机调节系统的控制上在调整时间以及超调量方面都比传统PID算法更好,控制效果好,克服了传统PID算法的不足。
关键词: 频率控制; 水轮机调速; 系统参数优化; PID控制器设计; 模糊神经网络PID; 水电站
中图分类号: TN876?34; TP13 文献标识码: A 文章编号: 1004?373X(2020)23?0099?04
Abstract: Frequency control is very important in the process of hydroelectric power generation, but the traditional PID control method for the complex control system with non?linearity and time?varying characteristics has the defects of difficult parameter tuning and poor control effect. Therefore, on the basis of the traditional PID algorithm, fuzzy control and neural network control algorithm, a combined control algorithm of fuzzy neural network and PID is proposed to optimize the PID parameters of hydraulic turbine governing system. It is applied to the hydraulic turbine governing system and compared with the traditional PID controller. The results show that the fuzzy neural network PID control algorithm is better than the traditional PID algorithm in adjusting time and overshoot, and has good control effect. It has overcome the shortcomings of the traditional PID control algorithm.
Keywords: frequency control; turbine speed governing; system parameter optimization; PID controller design; fuzzy neural network PID; hydropower station
0 引 言
水輪机控制系统的好坏决定了水电机组能否安全稳定的运行,同时也是水电站运行系统的核心部件。在水轮机控制系统中,频率的控制对电网的稳定性至关重要,对频率的控制效果在很大程度上决定了电能的质量以及电力系统的安全状况。电网频率的稳定性控制可以使电能质量得到大大提高,进一步提升人们的生活水平。
在控制领域中目前比较经典的方法是采用PID对调速系统进行闭环控制[1],PID依据给定值和实际测量值之间的误差,通过比例、积分、微分三个环节对系统进行控制。PID控制器相对于结构简单的线性系统来说有较好的控制效果,但是对于像水轮机调节系统这样具有非线性、时变性且存在非最小相位的系统来说,控制效果就不是那么理想了[2]。针对水轮机调节系统为了增加传统PID控制器的控制效果,本文结合模糊控制和神经网络的各自优势,利用模糊神经网络PID算法来对水轮机调速系统进行控制。
模糊神经网络PID算法[3]的原理是根据人的经验知识具有良好的学习能力,而且神经网络也不需要掌握系统精确的模型,可以很好地克服水轮机调速系统因为其非线性、时变性导致模型难以建立的缺陷,改进算法可以在线对PID参数进行实时调整,而且具有良好的抗干扰能力,模糊神经网络PID算法兼顾了模糊控制算法以及神经网络控制技术两者共同的优势,进而可以对水轮机调速系统这种复杂的系统进行很好的控制。
1 水轮机调速系统概述
1.1 水轮机调速基本原理
水轮机调速系统一般由引水系统、液压伺服系统、水轮发电机以及调速器组成[3?4],其调节的基本思路是:如果系统频率发生改变或者受到外界负荷扰动时,由于电能没办法大量存储,此时有功功率的变化将会导致频率随之变化,而水轮机转速的变化是导致频率变化的关键因素,转速的大小又跟水流量有关,因此为了平衡这种变化,根据实际情况需要对水轮机导叶开度进行调整,以维持转速变化率为0,使频率再次达到新的稳定状态。
1.2 YWCT?300/600/1000液压微机自动调速系统
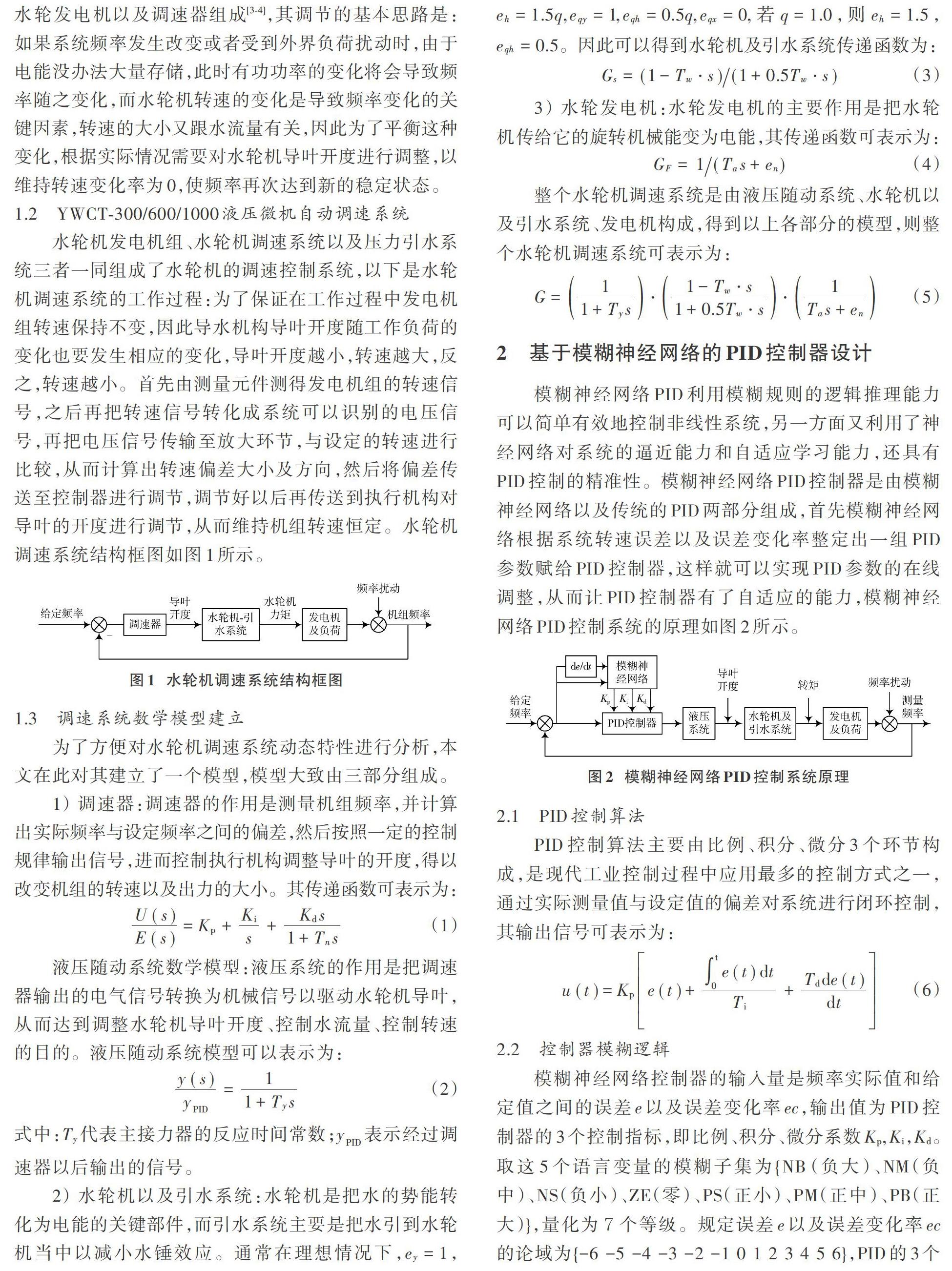
水轮机发电机组、水轮机调速系统以及压力引水系统三者一同组成了水轮机的调速控制系统,以下是水轮机调速系统的工作过程:为了保证在工作过程中发电机组转速保持不变,因此导水机构导叶开度随工作负荷的变化也要发生相应的变化,导叶开度越小,转速越大,反之,转速越小。首先由测量元件测得发电机组的转速信号,之后再把转速信号转化成系统可以识别的电压信号,再把电压信号传输至放大环节,与设定的转速进行比较,从而计算出转速偏差大小及方向,然后将偏差传送至控制器进行调节,调节好以后再传送到执行机构对导叶的开度进行调节,从而维持机组转速恒定。水轮机调速系统结构框图如图1所示。
1.3 调速系统数学模型建立
为了方便对水轮机调速系统动态特性进行分析,本文在此对其建立了一个模型,模型大致由三部分组成。
1) 调速器:调速器的作用是测量机组频率,并计算出实际频率与设定频率之间的偏差,然后按照一定的控制规律输出信号,进而控制执行机构调整导叶的开度,得以改变机组的转速以及出力的大小。其传递函数可表示为:
2 基于模糊神经网络的PID控制器设计
模糊神经网络PID利用模糊规则的逻辑推理能力可以简单有效地控制非线性系统,另一方面又利用了神经网络对系统的逼近能力和自适应学习能力,还具有PID控制的精准性。模糊神经网络PID控制器是由模糊神经网络以及传统的PID两部分组成,首先模糊神经网络根据系统转速误差以及误差变化率整定出一组PID参数赋给PID控制器,这样就可以实现PID参数的在线调整,从而让PID控制器有了自适应的能力,模糊神经网络PID控制系统的原理如图2所示。
2.1 PID控制算法
PID控制算法主要由比例、积分、微分3个环节构成,是现代工业控制过程中应用最多的控制方式之一,通过实际测量值与设定值的偏差对系统进行闭环控制,其输出信号可表示为:
2.2 控制器模糊逻辑
模糊神经网络控制器的输入量是频率实际值和给定值之间的误差[e]以及误差变化率[ec],输出值为PID控制器的3个控制指标,即比例、积分、微分系数[Kp][,Ki],[Kd]。取这5个语言变量的模糊子集为{[NB ](负大)、[NM](负中)、[NS](负小)、[ZE](零)、[PS](正小)、[PM](正中)、[PB](正大)},量化为7个等级。规定误差[e]以及误差变化率[ec]的论域为{-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6},PID的3个参数[Kp][,Ki]和[Kd]的论域取为{-0.6 -0.4 -0.2 0 0.2 0.4 0.6}。本文选用高斯函数作为神经元激活函数。
2.3 模糊神经网络结构和算法
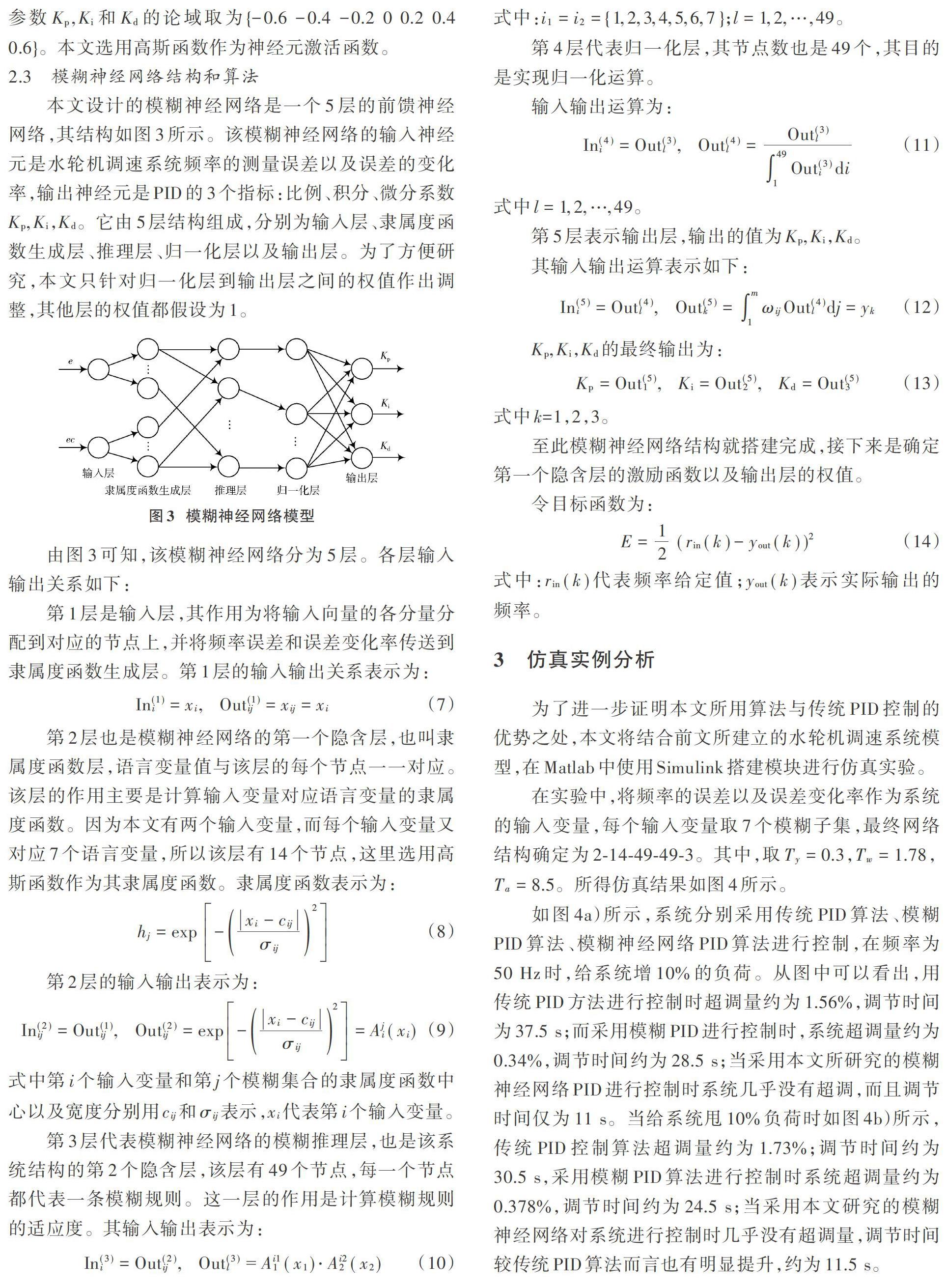
本文設计的模糊神经网络是一个5层的前馈神经网络,其结构如图3所示。该模糊神经网络的输入神经元是水轮机调速系统频率的测量误差以及误差的变化率,输出神经元是PID的3个指标:比例、积分、微分系数[Kp][,Ki],[Kd]。它由5层结构组成,分别为输入层、隶属度函数生成层、推理层、归一化层以及输出层。为了方便研究,本文只针对归一化层到输出层之间的权值作出调整,其他层的权值都假设为1。
3 仿真实例分析
为了进一步证明本文所用算法与传统PID控制的优势之处,本文将结合前文所建立的水轮机调速系统模型,在Matlab中使用Simulink搭建模块进行仿真实验。
在实验中,将频率的误差以及误差变化率作为系统的输入变量,每个输入变量取7个模糊子集,最终网络结构确定为2?14?49?49?3。其中,取[Ty=0.3],[Tw=1.78],
[Ta=8.5]。所得仿真结果如图4所示。
如图4a)所示,系统分别采用传统PID算法、模糊PID算法、模糊神经网络PID算法进行控制,在频率为50 Hz时,给系统增10%的负荷。从图中可以看出,用传统PID方法进行控制时超调量约为1.56%,调节时间为37.5 s;而采用模糊PID进行控制时,系统超调量约为0.34%,调节时间约为28.5 s;当采用本文所研究的模糊神经网络PID进行控制时系统几乎没有超调,而且调节时间仅为11 s。当给系统甩10%负荷时如图4b)所示,传统PID控制算法超调量约为1.73%;调节时间约为30.5 s,采用模糊PID算法进行控制时系统超调量约为0.378%,调节时间约为24.5 s;当采用本文研究的模糊神经网络对系统进行控制时几乎没有超调量,调节时间较传统PID算法而言也有明显提升,约为11.5 s。
由此可见,无论系统增减负荷,本文研究的控制算法对系统均具有很好的调节能力,且具有明显的优越性。
为了更直观表示,本文将各算法的超调量、调节时间进行了整理,结果如表1,表2所示。
4 结 语
本文提出了一种将模糊控制与神经网络控制理论结合的算法,并将其应用至水轮机调速系统控制当中,此方法结合模糊控制、神经网络控制、PID控制三者的优势,赋予了水轮机调速系统自我学习能力、逻辑推理能力。从仿真实验结果可以得出,模糊神经网络相比传统PID以及模糊PID算法来说,在超调量和调节时间上都有很明显的优势,在面对干扰时也有较强的鲁棒性以及自我调节能力,系统适应能力强,控制效果良好。因此本文所研究的方法在针对传统PID控制效果不佳难以解决非线性系统的问题上可以达到一个很好的控制效果,对水电站水轮机调速控制具有一定的参考价值。
注:本文通讯作者为朱正坤。
参考文献
[1] 王震,崔峻豪,丁泽涛,等.水轮发电机调节系统的模糊PID控制[J].信息技术与信息化,2018(10):83?85.
[2] 白国振,俞洁皓.基于改进模糊神经网络的PID参数自整定[J].计算机应用研究,2016,33(11):3358?3363.
[3] 陈志环.水轮机调节系统的参数辨识与控制策略研究[D].武汉:华中科技大学,2017.
[4] 门闯社.基于水轮机内外特性复合数学模型的调节系统动态特性研究[D].西安:西安理工大学,2018.
[5] 祁华宪.基于驾驶意图识别的纯电动汽车模糊控制策略研究[D].合肥:合肥工业大学,2017.
[6] 禹腾超,陈敏.基于SOM神经网络的汽轮发电机组振动故障诊断研究[J].工业控制计算机,2016,29(1):137?139.
[7] 张永振,苏寒松,刘高华,等.基于BP神经网络的PID控制器参数调整[J].南开大学学报(自然科学版),2018,51(3):26?30.
[8] 代月明,张丽娜,朱习军.基于Ziegler?Nichols频域PID的水轮机自适应调速系统设计[J].徐州工程学院学报(自然科学版),2018,33(3):47?51.
[9] ZHANG Leike, WU Qianqian, MA Zhenyue, et al. Vibration analysis of coupled bending?torsional rotor?bearing system for hydraulic generating set with rub?impact under electromagnetic excitation [J] Archive of applied mechanics, 2016, 86(9): 1665?1679.
[10] EGUSQUIZA E, VALERO C, PRESAS A, et al. Analysis of the dynamic response of pump?turbine impellers. Influence of the rotor [J]. Mechanical systems and signal processing, 2016, 68/69: 330?341.
[11] LI Chaoshun, MAO Yifeng, ZHOU Jianzhong, et al. Design of a fuzzy?PID controller for a nonlinear hydraulic turbine go?verning system by using a novel gravitational search algorithm based on Cauchy mutation and mass weighting [J]. Applied soft computing, 2017, 52: 290?305.
[12] 王雪珂.水电机组灰色模糊PID调速器设计与仿真[D].郑州:郑州大学,2017.
