对地基目标的三站时差定位技术研究*
2020-12-23屈渲睿王玉文姚昕彤朱志展
屈渲睿,王玉文,姚昕彤,朱志展
(电子科技大学 航空航天学院飞行器集群智能感知与协同控制四川省重点实验室,四川 成都 611731)
0 引言
面对空间中越来越复杂密集的电磁环境,为了保证可靠地获取信息,通过多架无人机搭载无源探测设备构成的无源定位系统,对敌方目标进行定位时更加隐蔽、及时和准确[1],同时可以克服地面无源定位系统受地球曲率和多径效应影响的限制。
三站时差定位是利用3 个观测站接收目标辐射信号的时差信息,根据测得的时差来构建目标位置解算方程的定位方法,具有极高的定位精度。它的定位误差不随观测站到目标辐射源的距离而变化,易于对跳频信号等短持续时间信号进行定位,以方便地利用信号的上升沿或下降沿测量信号到达不同观测站的时间差,此外在相互距离很远的监测站之间实现时间同步。采用北斗卫星导航系统可以很方便地将各站同步误差控制在10 ns 以内,完全可以满足时差定位的要求[2]。
而超短波和微波信号主要以地面空间波的形式进行有效传播。对于该频段的电磁波,通常采用直接点对点的直线传输,也就是视距传输。由于波长很短无法绕过障碍物,视距传输要求发射机与接收机之间没有物体阻碍。因为地球曲面的影响以及空间传输的损耗,视距传输的距离有限,超过视距以后需要中继转发。一般说来,每隔50 km 左右就需要设置中继站,将电波放大转发而延伸。因此,实际微波传输距离受地球曲率影响很大。另外,站高决定了微波传输距离。当发射天线和接收天线的高度越高时,电波传播的有效直视距离越远。当要对近距离非合作方辐射源目标进行测向定位时,可以通过提高接收天线高度的方式来降低地球曲面和城市环境的影响,从而提高对近距离地基目标测向定位的精度。
1 测向定位系统
基于系留无人机升空平台的三站协同无源时差定位系统简图如图1 所示。其中,该系统利用三架多旋翼无人机、系留线缆以及地面接收设备构成测向站系统。无人机使用地面设备供电,可以长时间滞空悬停,同时机载设备(天线、软件无线电平台)采集的数据可以通过系留线缆内置的光纤回传到地面。此系统具有空中长时间作业和数据传输带宽大的优势,且可独立安装也可车载安装,灵活性较高[3]。
本系统主要对地面固定或缓慢移动的辐射源目标进行定位,利用3 台系留无人机搭载天线和软件无线电(Software Defined Radio,SDR)平台的硬件前端USRP(Universal Software Radio Peripheral,通用软件无线电外设)对其发出的超短波和微波通信信号进行接收。其中,3 架系留无人机作为测向站A、B、C 的升空平台,在离地面约两三百米的高度与副站通过系留电缆连接,且经过地形校准保持在同一高度,并在统一的时间基准被确立后,两个副站与主站分别对同时捕获的信号进行到达时间差计算,然后将所有的时间差信息汇总到主站A,由主站A 来实现对目标信号的定位,并在终端进行显示。主站A 是系统控制和数据处理的核心部分,可实现对副站的协同工作控制。本系统通过SDR 平台与上位机终端连接构建数据链路,将目标信息传输至上位机并通过测向定位算法进行位置解算,同时上位机与数据中心进行交互获取区域内的坐标信息,最终与终端解算完成的位置信息联合完成整个定位流程。
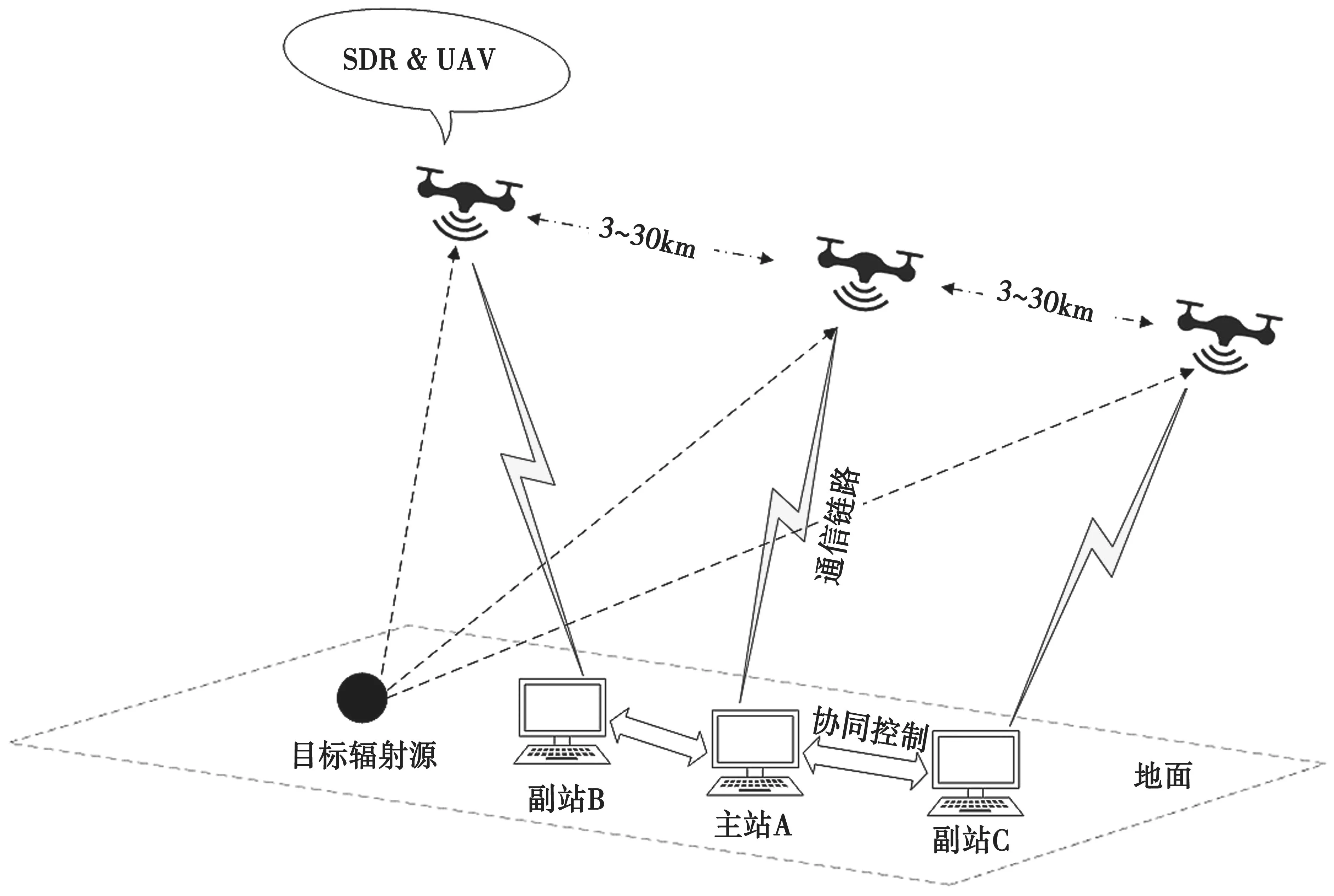
图1 三站协同无源时差定位系统
2 三站时差定位原理
时差定位主要分两步完成:先利用到达时差测量技术得到接收机间的时差测量值,后由此得到接收机间的距离差测量值,对应得到一组非线性双曲线方程(二维定位)或非线性双曲面方程(三维定位);利用定位解析算法得到这些方程组的解,当有其他限制条件时还需将限制方程引入方程组,最终解算出目标位置[4]。
在同一参考坐标系下,已知各测量站接收天线的坐标分别为A(x1,y1,h)、B(x2,y2,h)和C(x3,y3,h),设地基目标辐射源的坐标P(x,y,0),有:


其中,R(ii=1,2,3)为目标辐射源P 到测量站A、B、C 的距离;Ri(1i=2,3)为目标辐射源P 到测量站B、C 与目标辐射源P 到测量站A 的距离差;ti1(i=2,3)为目标辐射源P 到测量站B、C 与辐射源P 到A 测量站的时间差;c为光速。
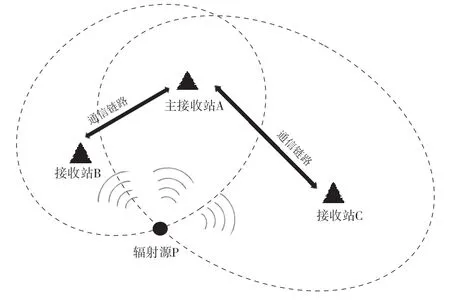
图2 三站时差定位系统

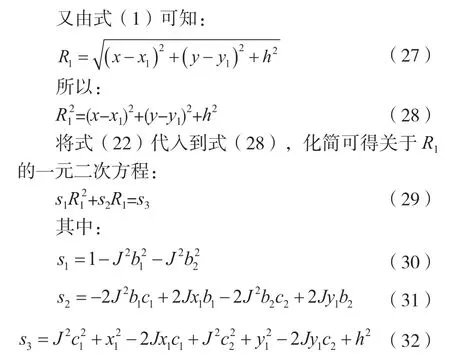
针对R1的方程式(29),可能会出现以下3种情况:
(1)当Δ=s22+4s1s3>0,R1有两个解。当两个解为一正一负时,取正值;均为正时,存在定位模糊;均为负值时,无法定位。
(2)当Δ=s22+4s1s3=0,R1只有一个解,若R1为正值,此时不存在模糊;若R1为负值,无法定位。
(3)当Δ=s22+4s1s3<0,定位方程组无解。
针对上述算法中的R1存在模糊解以及无解的情况,首先进行解模糊,先解出R1的值,再将其代入到式(16)中,即可求出目标辐射源P 的位置。
其中,解模糊一般有几种方式:
(1)增加测向站的数量,即通过增加TDOA的测量值来消除模糊解;
(2)通过引入其他定位体制来消除模糊现象,如增加测向功能,先获取目标源的辅助信息,从而初步地判断目标的方向,为后续时差定位消除模糊解;
(3)对某些特殊的定位模糊,可以根据一些先验信息来排除模糊。例如,对一些对敌系统,可以利用该系统和测向站的相对位置来消除模糊解[5]。
3 仿真实现及数据分析
基站和目标的位置仿真示意图如图3 所示。
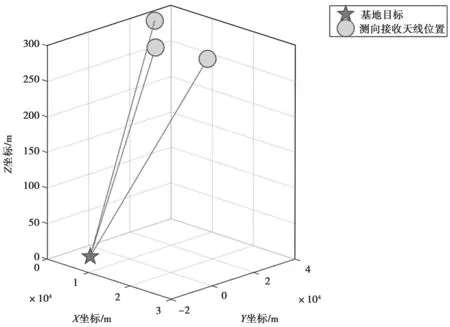
图3 基站和目标的位置仿真
假设授时精度为10 ns,在分别计算两个副站到目标点的距离与主站到目标点的距离差时,每一次都叠加上一个正态分布的随机噪声作为时差测量的误差,且采用合理的布站方式(站间距离控制在3~30 km,各站与目标点的距离控制在40 km 以内),。测向站天线的接收高度通过系留无人机的方式相对地基目标点的高度拉高300 m,设地基目标的高度为0 m,则得到如表1 所示的10 组数据。
通过对以上10 组数据进行计算分析,可以进一步得到对目标点定位的圆概率误差(Circular Error Probable,CEP)分别为20 m、74 m、71 m、85 m、10 m、22 m、20 m、66 m、58 m、68 m。
可知,当授时精度为10 ns 时,通过合理的布站方式,圆概率误差可以控制在较小的范围内,其实际目标位置与定位目标位置的二维坐标点(x 和y 轴坐标)仿真结果如图4 所示:
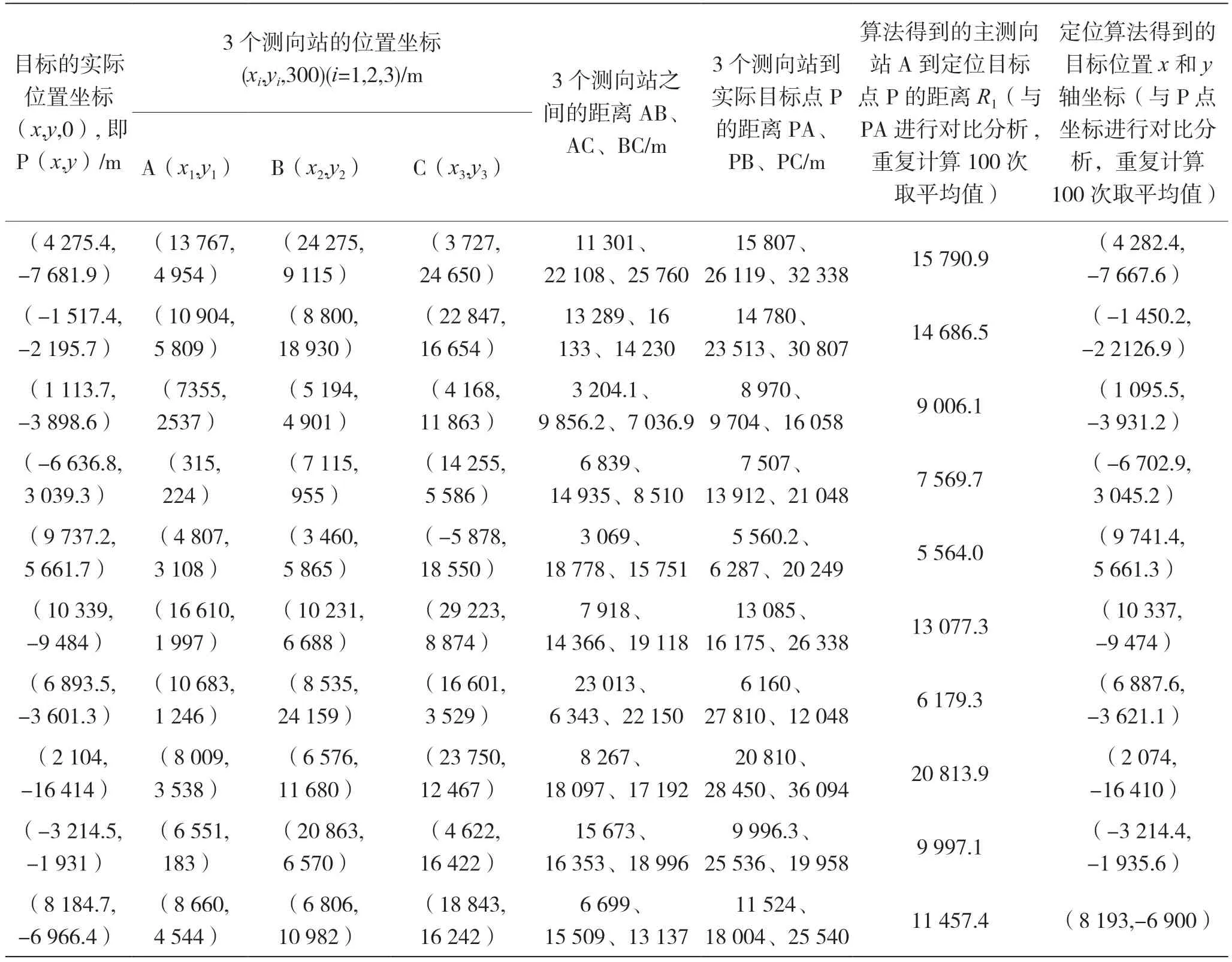
表1 各布站情况下的定位数据结果
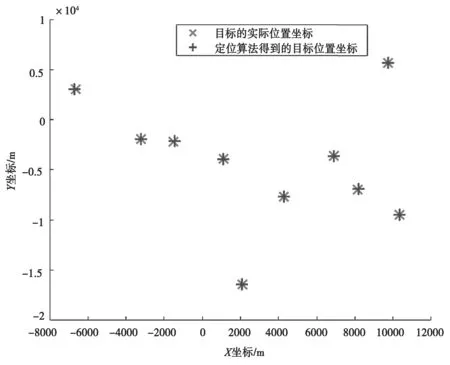
图4 实际目标位置与定位目标位置的二维坐标点仿真结果
以上仿真内容为接收天线相对地基目标拉高300 m 的定位结果。针对10 组不同的布站情况,将定位算法依次运行100 次,并得到了目标位置二维坐标的平均值作为最终的解算结果(表1),且进一步得到了各组数据对应的圆概率误差,最终得到了实际目标位置与定位目标位置的二维坐标对比分析图(图4)。可以清楚看到,定位结果与实际目标位置高度重合,定位误差较小。
4 结语
对近距离范围内的地面固定目标辐射源发出的超短波和微波信号,可以通过系留无人机的方式拉高观测站的接收天线对其进行接收处理,然后根据测量到的时差进行位置解算,能有效将定位误差控制在极小的范围内。此外,通过合理的布站方式,不仅可以极大地改善定位精度,还可以排除部分模糊解,从而较快地得出解算结果,并减小运算误差。
