利用曲线转角的悬臂梁刚度薄弱环节辨识方法
2020-12-21郭铁能曹进选蔡力钢白春生
郭铁能, 曹进选, 蔡力钢, 白春生
(1.北京工业大学先进制造技术北京市重点实验室, 北京 100124;2.北京工业大学先进制造与智能技术研究所, 北京 100124)
机床静刚度是机床加工稳定性与效率的关键指标之一. 为了提高机床的刚度,就必须了解机床各个环节的刚度,因为在最脆弱环节增加刚度能达到的效果最佳.
目前研究机床静刚度薄弱环节的研究方法主要有3种:有限元法、实验分析法、有限元与实验分析法相结合的方法. 利用有限元法计算机床的刚度,大量研究表明,准确仿真机床刚度的关键是添加结合面之间的参数[1-2],在结合面参数不准确的情况下,计算机床的静刚度可信度就不高. 利用实验分析法来测试机床刚度,其分析精度高,能完全表征机床的力学特性. 其主要实验方法是通过施力装置对机床的关键部位,如主轴,施加静力载荷. 然后利用千分表[3]或者电涡流传感器[4]记录机床各个结构的位移量. 但这2种测试位移量的方法需要安装千分表与电涡流传感器的夹持装置,在测量过程中难以找到合适的位置安装,测试方法不简便,而且在测试过程中,需要选取测试参考点,每一个位置测试的位移量均是相对于参考点计算,但在参考点的选取当中也容易发生变形,影响测试的精度. 利用有限元与试验分析法相结合的方法,首先,建立机床的三维有限元模型,为了保证有限元的加工精度需添加合理的结合面参数,利用有限元分析软件对模型进行初步力学分析,知晓观测点的位移. 然后,对机床进行实验分析,根据实验的分析结果修正有限元模型的参数. 接着对修正的模型重新进行有限元的静力分析,将分析的结果与实验模态的结果对照,如果结果不一致则接着修正,如此重复步骤,直到有限元模型力学分析结果与实验模态分析结果一致,利用最终的模型进行有限元的静力分析,选取参考点,计算出机床结构中变形最大的结构,即为机床结构的薄弱环节[5-8]. 有限元与实验分析法相结合的方法具有较高的分析精度,是目前研究机床静、动态特性的主要方法. 但该方法的缺点在于在模型参数修正中,机床结构之间的结合面参数是修正的主要目标,其次是机床结构的几何形状. 但是结合面修正参数的位置太多,而且使有限元模态的分析结果与实验模态分析结果一致的修正参数方法有很多种,因而修正方法具有复杂性与盲目性,导致最终的分析结果可靠性不高,整个分析流程周期过长[9].
机床在动态特性测试方法中,主要研究方法与机床刚度测试方法相同. 不同之处在于,首先机床动态测试中激励机床方式,如力锤或者激振器,相比机床静态特性中的力和加载器作用机床的方式要更加简便. 其次机床动态测试中拾振装置的安装方式,如加速度传感器,相比静态测试的测量装置,如千分表或者电涡流传感器要简便,而且测量精度更高.
在机床的建模当中有分布质量梁法,可以类比此方法,将机床的串联结构形成的若干整体结构等效悬臂梁结构. 将机床等效为悬臂结构,针对的是机床的部分结构,不对所有结构. 在机床组成结构中,如整体结构起始于床身,然后由基座、导轨结合面、结构块、结构块结合面、工作台结合面等组成. 床身主要使用质量大、横向大块铸铁,相对于床身上的其他结构不易变形或变形量很小,可以忽略,因此,可以看成一个固定端结构,所以类似固定端结构的机床结构组成方式可以等效悬臂梁结构. 机床的本身结构与结合面的刚度薄弱环节即为悬臂梁结构的损伤位置.
针对上述的问题,通过参考桥梁损伤识别法,根据机床结构刚度串联方式,本文提出将机床若干结构等效为悬臂梁模型,在简化机床结构的基础上,用机床动态测试方法研究机床静刚度薄弱环节,尝试采用加速度传感器的绝对数据,通过功率谱密度矩阵奇异值分解[10]获取加速度信号的模态参数,利用模态状态空间法[11]获取位移这种相对数据,从而消除实验测试中位移相对测定法导致的不准确性以及噪声对数据获取过程的干扰,在通过研究悬臂梁结构静刚度损伤导致的结构变形建立辨识指标的基础上,探索机床静刚度薄弱环节辨识方法.
1 理论基础
一个单自由度有阻尼系统,由质量和弹簧组成. 以质量块的静平衡位置为坐标原点,建立坐标系,当系统受到激励时,方程形式为
(1)

根据传递函数的定义
(2)
式中:H是传递函数;X是位移响应的频谱;F是激励力的频谱;w是激励力的频率;j是激振点. 当w的值等于零,式(2)为
(3)
此时,质量块的运动主要取决于弹簧的刚度,与质量无关,系统的动态特性呈现伪动态特性,即呈现静刚度特性.
当激励力为宽频域的脉冲信号时,系统在低频信号的响应将显示静态特性. 悬臂梁做横向振动时,将以轴线为平衡位置进行往复运动. 如果将悬臂梁系统等效成由弹簧、阻尼和质量构成的单自由度体系,且被测量的悬臂梁试件为比例阻尼,各向同性且均质,服从胡克定律. 因此,在低频信号下,悬臂梁的振动特性也呈现伪动态,其振动曲线将符合静力载荷作用下的挠度曲线. 若梁局部出现刚度薄弱,其振动曲线将不符合静力作用下的挠度曲线,在刚度薄弱的局部相对未出现刚度薄弱位置弯曲转角将增大,因此,以曲线转角为指标评估薄弱环节刚度理论上具有可行性.
2 曲线转角指标建立
对于悬臂梁的刚度薄弱环节刚度辨识,采用最广泛的方法是利用结构动态测试的模态分析,模态参数中的固有频率、模态振型可以作为衡量刚度变化的指标. 基于频率变化的识别主要是损伤前后结构的固有频率会发生变化,以此为依据来判断结构局部刚度是否发生变化,Hearn等[12]通过结构固有频率变化平方比对结构损伤的定位进行研究,Zhao等[13]探究频率对损伤的灵敏度. 然而,固有频率是对整体动态特性的表征,无法实现对局部损伤的定位功能. 基于振型的损伤识别方法通过分析前后的振型变化情况来识别结构损伤,王小朋等[14]研究振型变化前后悬臂梁损伤的灵敏度和损伤位置检测,结果表明振型对局部损伤的位置和程度不敏感. 利用模态参数作为指标对刚度进行评估,将不可避免地引入结构质量因素,导致评估效果不佳. 本文研究静刚度薄弱环节辨识问题,采用动态测试方法研究静态特性,辨识指标围绕悬臂梁挠度展开.
机床是一个质量连续分布的弹性体,具有无限多个自由度,但在动态分析中,可以根据机床的具体结构,将机床离散成若干个集中质量的子结构,子结构之间由等效弹簧和等效阻尼器联接,构成一个动力学模型. 文中考虑能等效为悬臂梁的机床结构. 其中,可将子结构之间的连接件等效为杆结构刚度薄弱区,如图1所示,区域a、b、c和d分别表示子结构1、2、3和4中不含节点的区域,区域bn表示节点的区域.
悬臂梁在自由端施力下的静力变形公式
(4)
式中:V为梁的挠度;L为梁长;l为距离固定端部的距离;P为施加的静力载荷;E为弹性模量;I为相对于梁振动方向的横截面惯性矩.
在振动测试下,利用力锤进行激励,由于力传感器的测量量程问题,无法获取0 Hz下的力载荷P的确定值,并且悬臂梁的弹性模量E、截面惯性矩I也是未知. 但可以把这些未知量看作一个整体,用量纲为一的参数A表示,即
(5)
选取靠近固定端位置的第一个测点为标准点,根据第一个测点的数据y1可以计算一个低频信号下的A值,记作A1:
(6)
以A1作为新的挠度方程的系数,根据其他各个测点位置坐标构造挠度曲线,可以得到构造的挠度数据矩阵元素,即
Vs=A1l2(3L-l)
(7)
式中Vs为构造的数据.
用vsi表示构造的挠度Vs(i)中的元素,即
(8)
式中vsi为构造的数据的第i个元素.
取0 Hz处的测试数据用Vm矩阵表示, 用vmi表示Vm中的元素:
(9)
式中vmi为第i个测点的实际数据.
根据式(8)与式(9),曲线转角指标θc表示为
(10)
式中:θc(i)为第i个测点的曲线转角;h为2个测点之间的间距.
θc中出现突变的位置对应于结构刚度薄弱的位置,其相对大小表明刚度薄弱的大小.
3 模态状态空间
在实际的动态测试过程中,由于拾振设备的测量范围问题、采集系统的精度问题以及环境噪声的干扰问题,低频信号的采集变得不易获取,这会导致刚度评估结果不准确. 在不增加测试成本的条件下,可将测试数据通过功率谱密度矩阵奇异值分解[10]进行模态参数的辨识,然后采用现代控制论的状态空间重新构建系统,通过仿真再次获得系统重构之后的低频信号.
3.1 系统振动的微分方程
以梁的轴线所在位置的固定端为原点,梁的轴线为横轴建立直角坐标系. 对于第i阶模态来说,每个模态之间相互独立,振动方程满足
(11)

3.2 系统的状态变量
(12)
3.3 系统的输入变量
悬臂梁振动系统的外界输入变量为作用于梁自由端的脉冲激励,在各个模态下,系统的输入变量与激励施加的位置有关.
(13)
式中φiq为第i阶输入信号位置为q的振型数据.
3.4 系统的输出变量
输出的变量由悬臂梁的研究目标决定,因此,选定系统的输出变量为位移
(14)
x1=φ11x11+φ21x21+…+φi1xi1x2=φ12x11+φ22x21+…+φi2xi1x3=φ13x11+φ23x21+…+φi3xi1⋮xi=φ1ix11+φ2ix21+…+φiixi1
(15)
式中:φji为第j阶振型的第i个元素;xi为第i个测点的位移.
根据式(11)~(15) 所描述的悬臂梁振动系统的微分方程式,并根据设立的悬臂梁振动系统输入变量、状态变量、输出变量,建立悬臂梁振动系统的状态空间方程的标准形式
(16)
Y=CX+DU
(17)
式中:X为系统的状态空间向量;Y为系统的输出变量列阵;U为系统的输入变量列阵;A、B为状态空间方程的系数矩阵;C、D为输出方程的系数矩阵.
4 算例分析
4.1 模型
不考虑梁的剪切变形,选取欧拉-伯努利梁单元的一致质量单元矩阵,通过MATLAB编程的方法组装梁有限元模型的质量矩阵M、刚度矩阵k. 对于有限元法建立的动力学方程[15]
(18)
对于比例阻尼结构阻尼系数
C=αM+βk
(19)

式(18)在状态空间的表达式为
(20)
进一步结合系统的输出方程,系统方程可表达为
(21)
Y=CYX
(22)
式中:Y为输出变量,CY为输出矩阵.
该悬臂梁长L=1.2 m,划分为等长的20段,如图2所示(图中圆圈内的数字为单元编号,下排数字为节点编号). 截面惯性矩为I=2.08×10-5m4,面积为A=0.025 m2,材料弹性模量为E=2.1×1011Pa,密度为ρ=7 850 kg/m3.
4.2 仿真
在MATLAB软件中编写20个梁单元组成的刚度整体矩阵与质量整体矩阵的程序,根据状态空间与有限元法之间的关系构建有限元状态空间方程,确定状态空间矩阵的系数矩阵、控制矩阵以及输出矩阵,在MATLAB的Simulink模块当中构建仿真流程图,如图3所示. 在此次仿真当中,仅输出位移振动量,并且减小部分单元弹性模量模拟刚度损失以检验曲率指标的辨识效果. 检验指标的过程也分2种情况:一种在输出的时域信号不加噪声;另一种在时域信号中加入噪声,以验证指标辨识的抗噪能力,确保在实际测试的含噪信号中,指标也能正常辨识.
由振动力学[16]得知,悬臂梁的前3阶固有频率的理论公式
(23)
Simulink仿真的各个节点振动的位移时域图如图4所示. 对比图5、6、7可知,当加入噪声时,信号的频谱图出现了较大的毛刺. 利用加噪声信号的前3阶模态参数构建模态状态空间方程并重新仿真获得的时域信号经过快速傅里叶变换(FFT)的频谱图变得光滑,从而消除了噪声的干扰.
图8(a)表明,在低频状态下(0 Hz),悬臂梁的振动曲线与静力载荷作用下的挠曲线相似,悬臂梁可以在动态测试中呈现静态特性,从而验证了理论的正确性,图8(b)表明利用状态空间方法重构悬臂梁系统能完整表达原系统的物理状态,表1中数值仿真结果与理论计算公式结果一致说明本文中的动力学建模具有合理性.
4.2.1 单个损伤有无噪声干扰的情况
考虑悬臂梁只有1个单元有不同损伤程度的情况,验证理论方法的评估效果. 取单元9刚度分别下降30%、50%、70%,无噪声用E9表示,有噪声用EN9,系统重构之后用ES9表示. 由于是转角指标,对于自由端节点转角不能计算,但1个单元有2个节点,并不妨碍对薄弱刚度环节的评估,后面算例可以证明.
图9给出了3种情况下有无噪声以及系统重构之后指标的评估效果,图中横坐标为节点编号,纵坐标为指标值,用弧度值表示.
图9(a)表示以转角指标评估的结果是准确的,在刚度薄弱处有明显的突变,且刚度损失越大,指标突变值就越大,因1个单元有2个节点,当1个单元刚度出现薄弱,2处发生突变. 因此,对1个单元损伤的情况能够实现准确定位以及量化刚度相对大小.
图9(b)中,信号中加入了30%的白噪声,即信噪比为10 dB. 由于有噪声干扰,低频信号获取不准确,虽然在8号和9号节点出现了突变,但后面节点也发生不同程度的波动,混淆识别,导致指标评估效果不佳. 但图9(c)显示,在利用掺杂噪声的信号进行系统重构之后的评估效果比纯粹的噪声信号具有很大提高,转角值在刚度损伤位置发生突变,其余节点位置指标值趋近于零,因而,能准确地评估大小和位置识别.
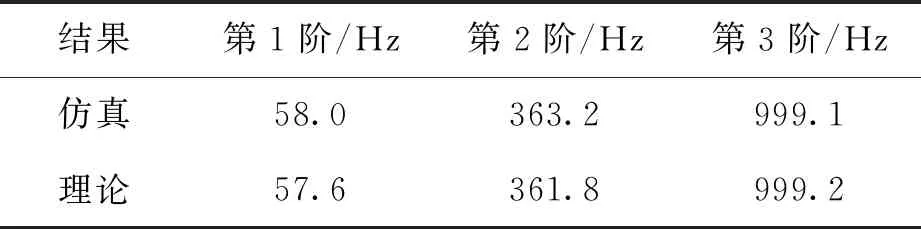
表1 仿真计算与理论计算的固有频率
4.2.2 2个单元损伤有无噪声干扰的情况
1) 考虑1个中间单元和边单元,即10单元和20单元的刚度分别降低20%、40%、60%和30%、50%、70%,无噪声用E10和E20表示,有噪声用EN10和EN20表示,系统重构之后用ES10和ES20表示.
图10(a)表示以转角指标评估的结果是准确的,在刚度薄弱处有明显的变化,且刚度损失越大,指标突变值就越大. 由于20号为边单元,20号节点的转角指标不能计算,因而只有19号节点出现突变,总共出现3个节点的位置突变.
图10(b)中,信号中加入了30%的白噪声,在发生刚度损伤之前的单元节点处指标值趋近于零,但之后的单元节点指标值发生不同程度的波动,评估效果不佳.
图10(c)显示,在进行系统重构之后,其评估效果比纯粹的噪声信号有很大提高,因此重构系统的方法有效.
2) 考虑2个相邻中间单元,即10单元和11单元的刚度分别降低20%、40%、60%和30%、50%、70%,无噪声用E10和E11表示,有噪声用EN10和EN11表示,系统重构之后用ES10和ES11表示.
图11(a)表示以转角指标评估的结果是准确的,虽然有2个单元出现损伤,但只有3处出现突变值,中间节点,即10号节点出现共节点情况,此节点在2个单元均出现刚度损伤情况下,突变值出现累加效应,导致突变效果最大,9号与11号节点有突变,突变值没有10号大,但也不妨碍评估效果,能够实现准确定位以及量化刚度相对大小.
图11(b)中,信号中加入了30%的白噪声的指标评估情况,但图11(c)显示,在利用掺杂噪声的信号进行系统重构之后,未发生刚度损伤的单元节点处出现指标波动,但总体趋于零,转角指标能正确评估结果.
4.2.3 3个单元损伤有无噪声干扰的情况
1) 考虑3个间隔单元,即5单元、8单元和12号的刚度分别降低20%、40%、60%,无噪声用E5、E8和E12表示,有噪声用EN5、EN8和EN12表示,系统重构之后用ES5、ES8和ES12表示.
图12(a)表示以转角指标评估的结果是准确的,在刚度薄弱处有明显的变化,且刚度损失越大,指标突变值就越大,3个单元出现刚度损伤,所以有6处发生变化,能够实现准确定位以及量化刚度相对大小.
图12(b)中,信号中加入了30%的白噪声的评估结果,指标评估效果不理想.
图12(c)中,在利用掺杂噪声的信号进行系统重构之后的转角指标评估结果较纯噪声信号有很大的提高,但效果不明显.
2) 考虑3个相邻单元,即6单元、7单元和8号的刚度分别降低30%、50%、70%,无噪声用E6、E7和E8表示,有噪声用EN6、EN7和EN8表示,系统重构之后用ES6、ES7和ES8表示.
图12(a)表示以转角指标评估的结果是准确的,在刚度薄弱处有明显的变化,且刚度损失越大,指标突变值就越大,3个单元出现刚度损失,但只有4处节点发生突变,是因为2个节点出现了共节点,即6号和7号节点,由于7号和8号单元刚度损伤更大,因此7号节点处的指标值突变最大,5号、6号和8号节点都发生不同程度的突变,刚度损伤程度越大,突变值越大,其他节点转角指标值为零. 因此,3个单元损伤能够实现准确定位以及量化刚度相对大小.
图12(b)中,信号中加入了30%的白噪声,即信噪比为70%. 由于有噪声干扰,低频信号获取不准确,指标评估效果不佳. 但图12(c)显示,在利用掺杂噪声的信号进行系统重构之后,相邻单元损伤的情况评估效果更佳,刚度最薄弱的节点,即7号节点能够准确评估,其他损伤单元处的节点转角指标也发生突变,5号与8号节点评估效果与附近的节点易发生混淆.
经算例仿真表明,曲线转角指标能够实现准确定位刚度薄弱环节以及评估薄弱环节刚度相对大小,虽然在噪声干扰情况下,指标评估效果不佳,但通过状态空间方法对系统进行重构之后比纯噪声信号评估效果有很大的提高,也能总体上准确定位和评估刚度相对大小. 需要指出的是,在仿真过程中由于MATLAB算法的局限性,在系统重构仿真过程中,只取了系统前3阶的模态参数,造成了模态截断误差,且在噪声添加的过程中信噪比过小,对高频信号过大,更影响了系统重构之后的评估效果. 综上,模态状态空间法可以足够精确重构原系统,准确获取系统的低频信号,降低噪声的影响.
5 实验研究
根据图13(a)所示,搭建实验系统,本次实验用的试验梁为矩型梁,为了实验的方便,将试件与基础铁板通过焊接方式进行连接并竖直放置,为了梁底部的固定,用4个大质量的铁块压住铁板组成悬臂梁试验件. 梁长1 m,从固定端部开始,等距离划分8段,每段12 cm,选取每个分段界限处的9个测点. 将加磁座的加速度传感器置于划分的9个测点上面. 将PC端与LMS用网线进行连接,然后,将加速度传感器线与BNC接头、LMS数据采集通道连接,最后,将力锤接入LMS仪器.
由于实验对低频信号具有高要求,在实验前用传感器校准器重新校准加速度传感器的灵敏度. 为减少加速度传感器重量对结构动态特性的影响,实验时使用小磁座的加速度传感器. 为了避免悬臂梁的扭转模态,将传感器尽量布置在梁的中心线上. 在实验实施之前,先利用理论公式计算悬臂梁大致的固有频率范围,以便调整LMS数据采集仪器的采样带宽. 实验选取的采用带宽为3 200 Hz,为了后期处理实验数据减弱噪声的干扰,选取锤击次数50次. 整个实验采用模态测试法,获取频响函数以及信号采集获取系统的时域信号.
实验时,如图13(a)所示,先对完整的悬臂梁进行模态测试实验,判断其振型是否符合悬臂梁振型特征的相似性,验证试验件搭建的合理性. 在此基础之上,对完整悬臂梁进行动态测试实验. 整个实验采用单点激励多点响应的方法,激励方式为力锤激励.
如图13(b)(c)所示,用切割机对悬臂梁进行破坏,模拟悬臂梁刚度的减弱. 对悬臂梁的第3段与第5段进行切割,沿着悬臂梁轴线切割12 cm,两侧横向深度均为1.5 cm,然后对破坏的悬臂梁进行动态测试实验. 最后,将实验的数据导出,用MATLAB软件进行数据处理.
对悬臂梁进行模态分析实验,判断试验件搭建的合理性.
图14为LMS自带软件绘制的频响图,根据频响图绘制振型图,如图15所示,图16是MATLAB绘制的前3阶振型图. 根据试验模态分析的结果,试验件的搭建符合悬臂梁固定方式,证明该试验件合理.
图17为测试实验的低频信号下的完整梁挠度曲线与理论计算挠度曲线的对比情况. 可以看出测试中,低频信号下,梁不具有严格的静态特性,第1个原因是由于传感器不能拾取0 Hz的信号,导致本文式(1)中的质量项参与了进来,造成不是刚度项起主导作用的效果,从而引起了误差. 第2个原因就是噪声的干扰,虽然出现这些情况,但不影响破坏之后的梁的识别效果,系统重构的方法可以解决上述问题,后面实验可以证明这一点.
图18(a)表明未进行系统重构,由于传感器的拾振范围与噪声影响,低频信号获取难度大,不能有效对刚度薄弱环节进行评估,指标波动程度大,且无规律.
图18(b)为利用测试数据,通过模态参数辨识算法,获取测试数据的模态参数,采用模态状态空间方法重构悬臂梁系统,最后通过MATLAB的Simulink模块仿真获取重构系统的动态时域数据,经过FFT变化,获取0 Hz信号的指标评估结果,第3段刚度损失位置处,指标能够准确识别,但第5段的刚度损失位置辨识效果则较为模糊,辨识效果不佳,但比较原系统,辨识效果有很大提高. 验证了理论的可用性.
6 结论
论文利用加速传感器和力锤设备,解决了悬臂梁静刚度薄弱环节测量与辨识问题. 基于测试数据,提出了用曲线转角这一指标来衡量悬臂梁的刚度变化,并利用状态空间法重构系统以消除噪声,以此获取低频情况下高精度转角指标,主要结论如下:
1) 仿真算例表明,如果获取的低频信号(0 Hz)是精确的且没有噪声污染,则通过曲线转角这一新指标可以准确识别刚度薄弱环节的位置和评估刚度薄弱的大小.
2) 为避免噪声干扰以及测试中对低频信号获取不准确影响评估效果,采用状态空间法对系统重构能够极大提高低频情况下的刚度辨识结果,从而提高指标的评估效果.
3) 通过数值仿真和实验数据结果表明,利用状态空间重构系统的方法能够解决曲线转角这一新指标在噪声干扰以及低频信号不易获取情况下影响刚度薄弱环节的评估的问题.
