基于循环神经网络的空载电动出租车的充电桩推荐方法
2020-12-18贾鉴刘林峰吴家皋
贾鉴,刘林峰,吴家皋
基于循环神经网络的空载电动出租车的充电桩推荐方法
贾鉴,刘林峰,吴家皋
(南京邮电大学计算机学院,江苏 南京 210023)
提出了一种基于循环神经网络的空载电动出租车的充电桩推荐方法(CPRM-IET,charging pile recommendation method for idle electric taxis),来为空载状态下的电动出租车推荐最佳充电桩。空载状态下的电动出租车移动一般依赖于驾驶人的潜意识移动倾向和驾驶习惯,因此需要根据其历史移动轨迹来预测其未来移动,从而找到充电额外移动最小的若干充电桩。在CPRM-IET中,使用了一种基于双阶段注意力机制的循环神经网络(DA-RNN,dual-stage attention-based recurrent neural network)模型来预测电动出租车的未来轨迹,DA-RNN模型包括输入注意力机制和时间注意力机制。输入注意力机制在每个时刻为输入的行驶记录分配权重,而时间注意机制为编码器的隐藏状态分配权重。根据预测轨迹,再选择额外移动最小的若干充电桩,并推荐给电动出租车驾驶人。仿真结果表明,CPRM-IET可以在额外移动和均方根误差方面取得较好的结果,反映了CPRM-IET可以准确地预测空载电动出租车的未来轨迹,并向这些电动出租车推荐合适的充电桩。
充电桩推荐;循环神经网络;输入注意力机制;时间注意力机制;轨迹预测
1 引言
随着石油、煤炭等传统能源储备的快速消耗和人类生活环境的恶化,人们越来越关注能源和环境问题,传统交通运输系统中车辆尾气排放法规变得日趋严格,特别是电动汽车[1]应运而生。电动汽车已经被广泛研究和开发用于更为环保的现代运输系统[2],作为电动汽车的一种衍生形式,越来越多的电动出租车已上线运营,它们通过携带的电池供能维持行驶,并依赖于充电桩充电以续航。
电动出租车的移动与其他电动汽车相比,有以下特点:①当电动出租车载客时(在运输状态),电动出租车的目的地由乘客的行驶意图决定;②当电动出租车没有载客时(在空载状态),电动出租车没有明确的目的地,往往取决于驾驶人的潜意识倾向和驾驶习惯[3],这一般是由驾驶人根据历史经验所形成的潜在移动趋势。例如,驾驶人根据经验会倾向于行驶到有更多的乘客等待出租车,或很少发生交通拥堵的道路或街道上。电动出租车处于空载状态的时间通常远长于运输状态,因此在空载状态下产生充电需求的可能性很大。
当前,关于电动汽车充电技术的研究大多集中在当电动汽车剩余电能低于预设电能阈值时,根据已知的目的地推荐最优的行驶路线和合适充电桩,而本文工作主要关注空载电动出租车的充电桩推荐问题,即如何为没有明确目的地的空载电动出租车推荐合适的充电桩和行驶路线,本文通过挖掘出驾驶人的潜意识目的地来做出充电桩推荐决策,从而期望实现空载电动出租车的额外移动距离最小化。
为此,本文引入了基于双阶段注意力机制的循环神经网络(DA-RNN,dual-stage attention-based recurrent neural network)[4],用来预测电动出租车的未来轨迹。DA-RNN是在基于长短期记忆(LSTM, long and short term memory)网络的编码器和解码器模型中融入了注意力机制,并且输入行驶记录和目标轨迹,从而得到待充电的空载电动出租车的预测轨迹,然后将预测轨迹的最后位置作为驾驶人的潜意识目的地,再根据当前电动出租车位置和周边充电桩部署情况来选择若干最佳充电桩,并将这些充电桩推荐给电动出租车驾驶人,以供其作为充电参考。


其中表示两个位置之间的曼哈顿距离[5]。表示电动出租车从行驶到充电桩,待充电过程完成后,再移动到预测目的地的路径总长。
Figure 1 Charge extra mobile
本文的主要创新点包括:①基于DA-RNN模型将预测轨迹由单点预测改进为多点预测。②将DA-RNN模型得到的预测结果用于充电桩推荐方法,选择出额外移动最小的充电桩。
2 相关工作
空载电动出租车的充电桩推荐过程分为两个阶段:电动出租车的未来轨迹预测;充电桩的选择和推荐。目前,已有了一些相关工作。例如,通过循环神经网络(RNN,recurrent neural network)[6]来进行轨迹预测,文献[7]使用离散小波变换将交通数据分解为非线性(近似)和线性(详细)分量,之后通过离散小波变换的逆变换重构这些分量,并分别基于自回归移动平均模型和RNN模型进行轨迹预测。文献[8]介绍了一种递归点过程网络,该网络使用一些时间RNN实例化了时间点过程模型。特别是,强度函数由两个RNN构成,即捕获事件之间关系的时间RNN和基于时间序列的RNN更新强度函数。文献[9]提出了一种基于深度循环神经网络的算法,来预测车辆的机动性,并促进车辆之间传感数据的传递。此外,还出现了一些RNN模型的变形形式,如文献[10]提出了一种行人轨迹预测的方法,并设计了一种基于编码器−解码器框架和双向循环神经网络模型。文献[11]提出了一种稀疏的循环神经网络来预测大西洋飓风的移动轨迹,并通过比较飓风的移动方向找出与目标飓风最为相似的飓风。
综上所述,RNN适用于轨迹预测问题,尤其是在输入序列较小的情况下。然而随着输入序列长度的增加,RNN可能会产生长期依赖问题,导致预测精度急剧下降。为此,研究人员开始关注到RNN特殊形式——LSTM网络结构。例如,文献[12]提出了一种基于LSTM网络的新型交通预测模型。与传统的预测模型不同,该LSTM网络是由许多存储单元组成的二维网络,基于此分析了交通系统中的时空相关性。文献[13]提出了一种使用双LSTM网络对周围车辆进行轨迹预测的算法,该算法能够有效地提高在交互驾驶环境中的预测精度。该方法将连续轨迹反馈到第一个LSTM,实现驾驶人意图的识别,而第二个LSTM主要用于轨迹预测。文献[14]介绍了一种LSTM神经网络,该网络能够准确预测高速公路上车辆的纵向和横向轨迹。文献[15]提出了一种基于LSTM模型的编码器−解码器模型来生成周围车辆的实时轨迹序列,将预测结果表示为轨迹序列而不是单个轨迹位置。针对行人轨迹预测的LSTM状态修正问题,文献[16]考虑了相邻节点的当前意图,并迭代地优化了所有参与者的当前状态。文献[17]提出了一种基于LSTM的循环神经网络,用于分析时间行为并预测周围车辆的未来坐标,然后在网格地图上生成车辆出现在不同位置的可能性。在上述工作中,LSTM网络较好地解决了传统RNN的长期依赖问题,从而提高了轨迹预测精度,但上述工作都没有区分不同历史位置的重要性差异。
此外,注意力机制被广泛使用于各类应用。注意力机制从输入序列中了解每个元素的重要性,并赋予每个元素不同权重。例如,文献[18]提出了一种视频汇总框架,被称为视频汇总的注意力编码器−解码器网络,其中编码器使用双向长短期存储器对输入视频帧之间的上下文信息进行编码,而解码器分别使用加法和乘法目标函数。文献[19]构建了第一个基于端到端注意力的编码器解码器模型,以直接处理从原始语音波形到文本转录的过程。文献[20]在编码器和解码器神经网络内使用新型时空注意力机制显示视频字幕,较好地考虑了视频中的空间和时间结构,使解码器自动选择最相关的时间段中的有效区域以进行单词预测。
还有一些其他轨迹预测方法。例如,在响应变量和预测变量均包含多元随机函数的情况下,文献[21]提出了一种多元函数线性回归方法(Linear)来分析和预测多元函数数据。多元函数线性回归模型与多元函数主成分分析方法相结合,分别利用了多元响应和预测变量中各成分函数之间的互相关优势。文献[22]通过将XGBoost回归模型应用于一组已识别的内部和极端条件的旅行,可以预测出租车旅行轨迹的静态旅行时间。文献[23]提出的远距离相邻依赖模型,可以将车辆轨迹转换成固定长度的矢量,以预测该车辆的最终目的地。文献[24]通过融合基于物理和基于机动的轨迹预测方法,提出了一种交互式多模型轨迹预测方法。基于物理的轨迹预测方法可以在考虑车辆行驶动态参数的情况下确保短期的准确性,而基于机动的轨迹预测方法可以预测车辆的长期未来轨迹。以上关于轨迹预测的方法对输入的每个轨迹点都平等对待,并不会衡量不同轨迹点的重要性和关系。
在充电桩推荐研究中,文献[25]主要考虑了电动汽车的所需充电时间,并为电动汽车推荐了合适的充电桩,因此可以使电动汽车的充电等待时间最小化。文献[26]提出了基于双层优化仿真框架的模型,该框架结合了具有排队延迟的高层多服务器分配模型以及基于Jung和Jayakrishnan早期工作的下级调度仿真。文献[27]使用来自配备GPS的出租车轨迹来检测加油站访问次数,测量花费的时间并估算总体需求。文献[28]研究了插电式电动出租车的最佳充电策略,即在不确定的电价和随时间变化的收入情况下,通过选择合适的充电时间段来最大化其运营利润。文献[29]研究了在实时电价环境下面向多个电动汽车的充电桩调度问题,协调了电动汽车的充电过程,在满足所有车辆充电要求的前提下使总成本降至最低。
本文工作将基于LSTM网络结构的DA-RNN模型和注意力机制,其中通过基于LSTM网络的编码器/解码器来实现空载电动出租车的轨迹预测,而加入注意力机制的目的是为每个时刻的行驶记录和每个编码器隐藏状态分配不同权重,从而使预测结果更加精确。然后将预测轨迹的最后位置作为驾驶人的潜意识目的地,在空载电动出租车的剩余电能足以到达附近充电桩的情况下,为电动出租车推荐额外移动最小的充电桩。
3 基于双阶段注意力机制的循环神经网络
本节介绍如何利用基于双阶段注意力机制的循环神经网络来预测空载电动出租车的未来轨迹。首先,表1给出了主要参数的说明。

表1 参数说明
3.1 符号表示


图2 n条行驶记录
Figure 2driving sequences

图3 某一特定时刻的行驶记录
Figure 3 Driving sequence at a certain moment
图4展示了目标轨迹、未来轨迹和预测轨迹的示例,图中黑色的实线表示目标轨迹,黑色的虚线表示预测轨迹,红色的虚线表示未来轨迹。其中目标轨迹和未来轨迹组成一条实际行驶轨迹,而预测轨迹是经过DA-RNN模型预测得到的结果。
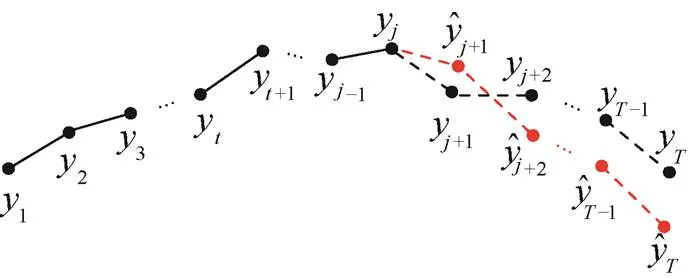
图4 目标轨迹、未来轨迹和预测轨迹
Figure 4 Target trajectory, future trajectory and predicted trajectory
3.2 轨迹预测方法
本文使用基于双阶段注意力机制的循环神经网络DA-RNN进行预测,预测方法与文献[4]类似,主要区别在于将预测结果由单点预测改为多点预测。



图5 带有输入注意力机制的编码器
Figure 5 Encoder with input attention mechanism

图6 带有时间注意力机制的解码器
Figure 6 Decoder with time attention mechanism


4 空载电动出租车的充电桩推荐方法



图7 电动出租车的剩余电量不足以到达充电桩的情况
Figure 7 When the remaining power of the electric taxi is not enough to reach the charging pile
综上所述,本文给出的充电桩推荐方法如下。
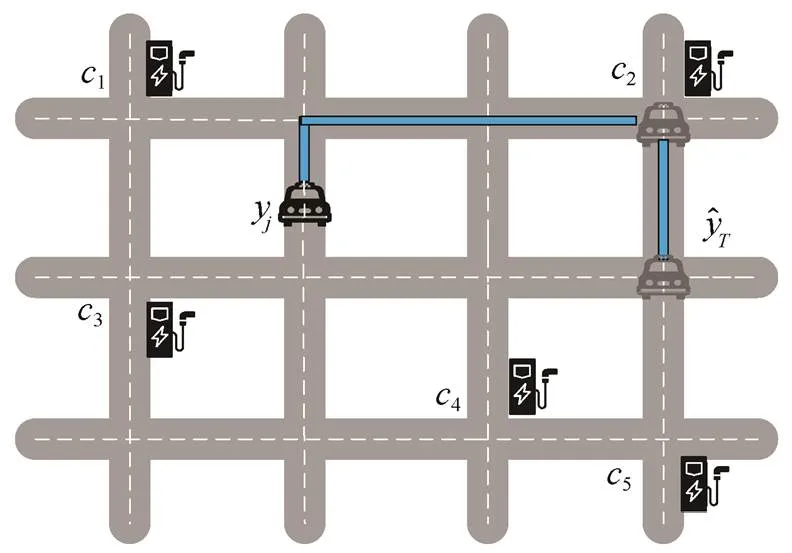
图8 电动出租车的剩余电量足以到达充电桩的情况
Figure 8 When the remaining power of the electric taxi is enough to reach the charging pile



(3)从个充电桩中找到前个最小的额外移动,并向用户推荐前个具有最小额外移动的充电桩。
(4)为每辆需要充电的电动出租车推荐前个具有最小额外移动的充电桩。

算法1 基于循环神经网络的空载电动出租车的充电桩推荐方法(CPRM-IET)

5 仿真实验
首先介绍仿真中使用的数据集,然后设置评价指标,并通过观察不同参数对DA-RNN和CPRM-IET的影响来合理地设置参数。最后,通过与其他方法比较来验证DA-RNN的有效性。表2给出了部分仿真参数的设置。
5.1 实验数据集
实验使用了北京出租车轨迹数据集[31],其中数据集1至数据集5分别是出租车2008年2月2日到2008年2月6日在9:30—16:00时段的轨迹数据,该数据集每间隔10 s记录了车辆坐标。在实验中,前80%的轨迹数据用于训练集,10%的轨迹数据用于测试集,最后10%的轨迹数据用于验证集。

表2 仿真参数表
5.2 评价指标

5.3 不同参数对DA-RNN的影响
通过观察不同参数对DA-RNN的影响来设置参数取值。在测试每组参数的过程中输入不同的轨迹数据集。首先,测试条行驶记录时长对DA-RNN均方根误差的影响,如图9所示。将分别设置为5至25时,结果表明:当=20时均方根误差最小,即轨迹预测效果最好;当<20时,随着行驶记录时长的增加,越容易找出时间相关性最大的编码器隐藏状态,更容易寻找行驶记录和目标轨迹之间的相关性,预测精度更高,但当增加到20时,随着行驶记录时长的增加,DA-RNN模型对行驶记录最先输入值会损失一部分记忆,则得到的行驶记录会缺少一部分信息,预测精度会降低,所以这并不意味着行驶记录的时长越长,预测就越准确。
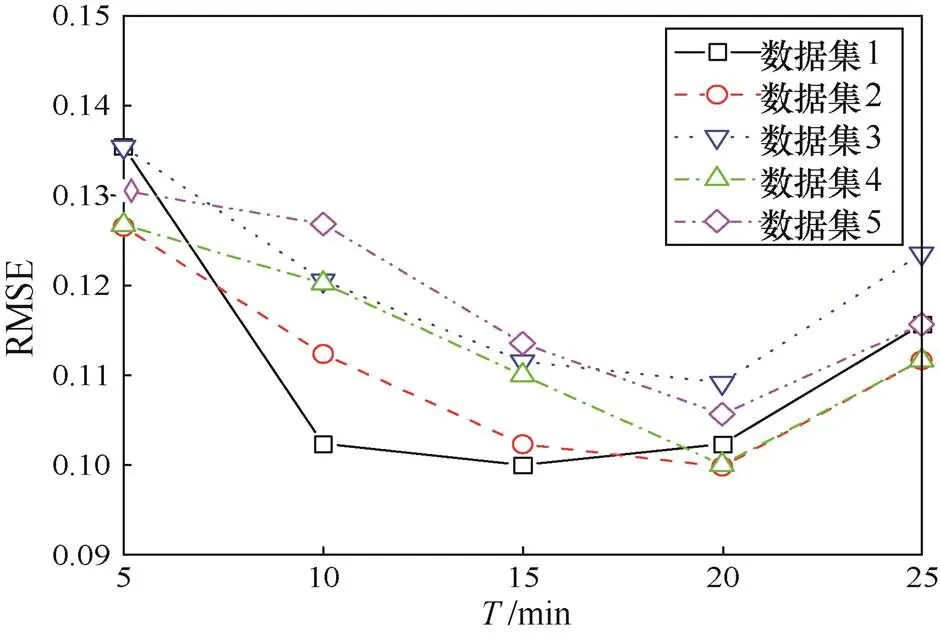
图9 T值对轨迹预测均方根误差的影响
Figure 9 The influence ofvalue on the root mean square error of trajectory prediction
然后测试编码器和解码器的隐藏状态数量和对预测轨迹均方根误差的影响,分别如图10和图11所示。将和从16逐渐增加至256,可以发现当和都设置为128时,预测精度最高,该结果表明,编码器和解码器的隐藏状态数量并非越多越好,如果过多,将导致梯度爆炸问题和对训练数据的过度拟合,这反而降低了预测精度。
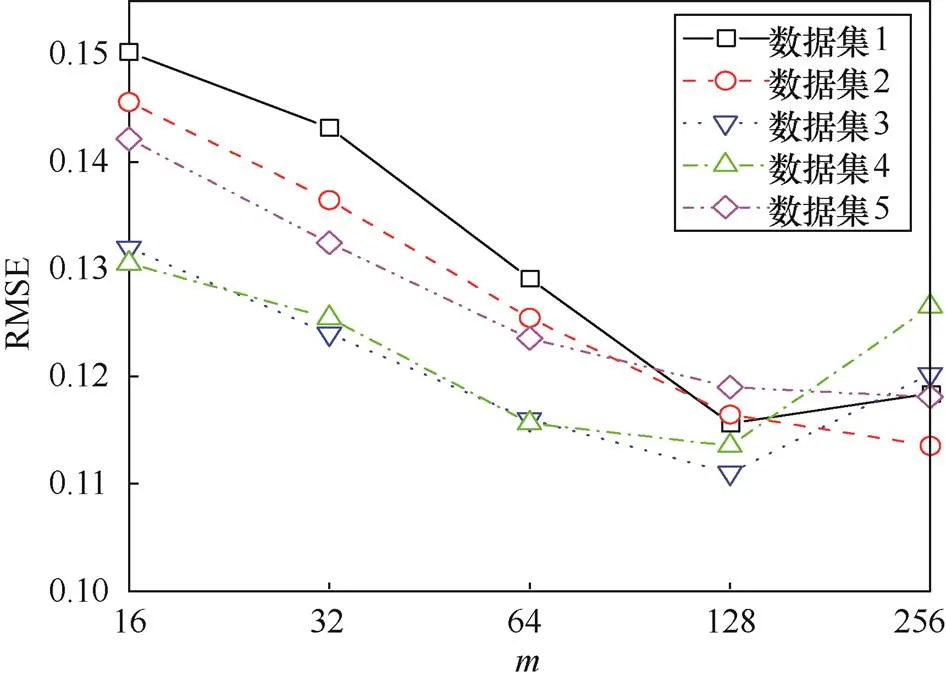
图10 编码器隐藏状态数量对轨迹预测的影响
Figure 10 The influence of the number of hidden states of the encoder on trajectory prediction

图11 解码器隐藏状态数量对轨迹预测的影响
Figure 11 The influence of the number of hidden states of the decoder on trajectory prediction
图12给出了基于不同行驶记录的条数的轨迹预测均方根误差。当<8时,随着行驶记录条数的增加,得到的行驶记录信息越多,越容易进行特征提取,越容易找到相关性较高的行驶记录,则预测精度更高,但当增加到8时,随着行驶记录条数的增加,将导致梯度爆炸问题,则预测精度会降低,所以这并不意味着行驶记录的条数越多,预测就越准确。

图12 行驶记录的条数对轨迹预测结果的影响
Figure 12 The influence of the number of driving sequence on the result of trajectory prediction
5.4 DA-RNN和其他轨迹预测方法的比较
图13展示了预测结果和推荐充电桩的示例。然后,将DA-RNN的预测结果与其他3种轨迹预测方法进行比较。红线表示实际轨迹,蓝线表示预测轨迹,蓝点表示设置的充电桩,红点表示推荐的充电桩。图13给出的不同轨迹集的轨迹预测结果可以看出,预测结果是相对稳定的。图14展示了DA-RNN与其他方法在轨迹预测均方根误差上的比较。DA-RNN模型的编码器部分引入输入注意力机制来对行驶记录进行特征提取,为相关性较高的行驶记录赋予更高的权重;DA-RNN模型的解码器部分通过时间注意力机制为每个编码器的隐藏状态赋予不同的权重,来找出时间相关性最大的编码器隐藏状态,从时间上来寻找行驶记录和目标轨迹之间的相关性。结果表明DA-RNN的预测结果相对比较准确。
5.5 CPRM-IET对不同参数的敏感性
首先,通过比较观察不同参数对CPRM-IET影响。推荐充电桩数量对平均额外移动的影响,如图15所示。当推荐的充电桩数量为2时,平均额外移动最小,即表示充电桩推荐最为准确。当推荐的充电桩数量较少时,理论上AEM应该较小,提供的充电桩推荐方案应该更好,但由于充电桩的分布具有一定的不确定性,因此平均额外移动结果随着的取值不同出现不规则变化。

图13 预测结果和推荐充电桩的示例
Figure 13 Predict results and examples of recommended charging piles
Figure 14 Comparison of different trajectory prediction methods

图15 推荐充电桩数量r对平均额外移动的影响
Figure 15 The influence of the recommended number of charging pileson the average extra movement
图16显示了充电桩的数量对平均额外移动的影响。当充电桩的数量为25时,平均额外移动最小。当充电桩的数量过少时,所推荐充电桩数量随之减少,电动出租车驾驶人移动意图的改变容易造成所推荐充电桩变得不合理,从而平均额外移动会急剧增加。此外,图17和图18分别展示了每条行驶记录时长和剩余电量阈值对平均额外移动的影响。当设置为20或剩余电量阈值设置为25%时,平均额外移动最小,即充电桩推荐结果最佳。特别地,当将剩余电量阈值设置得较小时,电动出租车需要频繁的充电,因此造成平均额外移动的增加。

图16 充电桩的数量s对平均额外移动的影响
Figure 16 The influence of the number of charging pileson the average extra movement
6 结束语
本文首先使用DA-RNN模型为空载电动出租车预测轨迹。在该过程中,使用了带输入注意力机制的编码器为每个时刻的行驶记录赋予不同权重,以便具有更多相关特征的轨迹点在通过编码器时赋予更高的重要性,并减少了不相关的轨迹点的数量,尤其对带嘈杂的输入具有较好顽健性。然后,使用带时间注意力机制的解码器为每个编码器的隐藏状态分配权重,生成上下文向量,并结合目标轨迹在当前时刻的位置生成解码器的隐藏状态,从而使预测结果更加准确。在预测出第一个位置之后,将上一时刻的预测轨迹位置输入解码器,最终确定预测轨迹。在充电桩推荐方面,通过电动出租车剩余电能判断出可用充电桩的范围,并选择额外移动最小的若干充电桩,并推荐给电动出租车,这可以降低电动出租车额外开销。实验结果表明,本文提出的基于循环神经网络的空载电动出租车的充电桩推荐方法能够准确地预测出空载电动出租车的潜在移动,并选择和推荐合适的充电桩给驾驶人,随着电动出租车的逐步推广及普及,该方法将适用于更多的场景和应用。在将来的研究中,将考虑结合模型驱动和数据驱动的方法去进行充电桩的推荐,即根据充电桩和路段的位置建立一个模型,通过调整模型参数,使电动出租车的轨迹数据贴合这个模型,达到额外移动最小的目的。

图17 行驶记录时长T对平均额外移动的影响
Figure 17 The influence of driving sequence lengthon average extra movement

图18 剩余电量阈值δ对平均额外移动的影响
Figure 18 The influence of the remaining battery thresholdon the average extra movement
[1] LU J, CHEN Z H, MA Z F, et al. The role of nanotechnology in the development of battery materials for electric vehicles[J]. Nature Nanotechnology, 2016, 12: 1031-1038.
[2] ALTANO D, WU G, BARTH M J. GlidePath: eco-friendly automated approach and departure at signalized intersections[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(4): 266-277.
[3] WALLACE B, GOUBRAN R, KNOEFEL F, et al. Measuring variation in driving habits between drivers[C]//IEEE International Symposium on Medical Measurements and Applications (MeMeA). 2014.
[4] QIN Y, SONGD J, CHENG H F, et al. A dual-stage attention-based recurrent neural network for time series prediction[J]. arXiv: 1704. 02971, 2017.
[5] GRECHE L, JAZOULI M, ES-SBAI N, et al. Comparison between Euclidean and Manhattan distance measure for facial expressions classification[C]//International Conference on Wireless Technologies. 2017.
[6] LIU W, SHOJI Y. DeepVM: RNN-based vehicle mobility prediction to support intelligent vehicle applications[C]//IEEE Transactions on Industrial Informatics. 2019.
[7] MADAN R, MANGIPUDI P S. Predicting computer network traffic: a time series forecasting approach using DWT, ARIMA, and RNN[C]//InternationalConference Contemporary Computing(IC3). 2018.
[8] XIAO S, YAN J, FARAJTABAR M, et al. Learning time series associated event sequences with recurrent point process networks[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(10): 3124 - 3136.
[9] LIU W, SHOJI Y. Applying deep recurrent neural network to predict vehicle mobility[C]//IEEE Vehicular Networking Conference (VNC). 2018.
[10] WU J, WOOH, TAMURA Y, et al. Pedestrian trajectory prediction using BiRNN encoder–decoder framework[J]. Advanced Robotics, 2019, 33(18): 956-969.
[11] KORDMAHALLEH M M, SEFIDMAZGI M G, HOMAIFAR A, et al. Hurricane trajectory prediction via a sparse recurrent neural network[C]// International Workshop on Climate Informatics. 2015.
[12] ZHAO Z, CHEN W H, WU X M, et al. LSTM network: a deep learning approach for short-term traffic forecast[J]. Iet Intelligent Transport Systems, 2017, 11(2): 68-75.
[13] XIN L, WANG P, CHAN C Y, et al. Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks[C]//2018 IEEE International Conference on Intelligent Transportation Systems (ITSC). 2018.
[14] ALTCHÉ F, FORTELLEA D L. An LSTM network for highway trajectory prediction[C]//International Conference on Intelligent Transportation Systems (ITSC). 2017.
[15] PARK S H, KIM B D. Sequence-to-sequence prediction of vehicle trajectory via LSTM encoder-decoderarchitecture[C]//IEEE Intelligent Vehicles Symposium(IV). 2018.
[16] ZHANG P, OUYANG W. SR-LSTM: state refinement for LSTM towards pedestrian trajectory prediction[C]//IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2016: 12085-12094.
[17] KIM B D, KANGC M. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network[C]//IEEE International Conference on Intelligent Transportation Systems (ITSC). 2017.
[18] JI Z, XIONG K, PANG Y, et al. Video summarization with attention-based encoder-decoder networks[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2019.
[19] TJANDRA A, SAKTI S. Attention-based Wav2Text with feature transfer learning[C]//IEEE Automatic Speech Recognition and Understanding Workshop(ASRU). 2017.
[20] YAN C, TUY. STAT: spatial-temporal attention mechanism for video captioning[J]. IEEE Transactions on Multimedia, 2019, 22(2): 229-241.
[21] CHIOU J, YANG Y. Multivariate functional linear regression and prediction[J]. Journal of Multivariate Analysis, 2016, 146: 301-312.
[22] KANKANAMGE K D, WITHARANAGEY R. Taxi trip travel time prediction with isolated XGBoost regression[C]//Moratuwa Engineering Research Conference (MERCon). 2019.
[23] QIAN C, JIANGR. Vehicle trajectory modelling with consideration of distant neighbouring dependencies for destination prediction[J]. International Journal of Geographical Information Science, 2019, 33(10): 2011-2032.
[24] XIE G, GAO H. Vehicle trajectory prediction by integrating physics and maneuver-based approaches using interactive multiple models[J]. IEEE Transactions on Industrial Electronics, 2017, 65(7): 5999-6008.
[25] TIAN Z, JUNGT. Real-Time charging station recommendation system for electric-vehicle taxis[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11): 3098-3109.
[26] JUNG J, CHOW J Y, JAYAKRISHNAN R, et al. Stochastic dynamic itinerary interception refueling location problem with queue delay for electric taxi charging stations[J]. Transportation Research Part C: Emerging Technologies, 2014, 40: 123-142.
[27] ZHANG F, WILKIE D. Sensing the pulse of urban refueling behavior[C]//ACM International Joint Conference on Pervasive and Ubiquitous Computing. 2013: 13-22.
[28] YANG Z Y, SUN L H, CHEN J M. Profit maximization for plug-in electric taxi with uncertain future electricity prices[J]. IEEE Transactions on Power Systems, 2014, 29(6): 3058-3068.
[29] YOU P, YANG Z. Efficient optimal scheduling of charging station with multiple electric vehicles via V2V[C]//IEEE International Conference on Smart Grid Communications. 2014: 716-721.
[30] GAOW, KIMS W, BOSSE H, et al. Measurement technologies for precision positioning[J]. CIRP Annals, 2015, 64(2): 773-796.
[31] YU Z, XING X, MAW Y. Geolife: a collaborative social networking service among user, location and trajectory[J]. IEEE Data Engineering Bulletin, 2010, 33(2): 32-40.
Charging pile recommendation method for idle electric taxis based on recurrent neural network
JIA Jian, LIU Linfeng, WU Jiagao
School of Computer Science, Nanjing University of Posts and Telecommunications, Nanjing 210023, China
A charging pile recommendation method for idle electric taxis (CPRM-IET) based on recursive neural network was proposed to recommend the optimal charging piles for idle electric taxis. Usually, the movement of each idle electric taxi depends on the subconscious movement tendency and driving habits of the driver. Therefore, it is necessary to predict the future movement based on its historical movement trajectories, so as to find the charging piles with the least extra movements. In CPRM-IET, a dual-stage attention-based recurrent neural network (DA-RNN) model was provided to predict the future trajectories of electric taxis. DA-RNN model includes two types of attention mechanisms which are input attention mechanism and temporal attention mechanism. The input attention mechanism assigns different weights to the input driving sequence at each time slot, and the temporal attention mechanism assigns weights to the hidden state of the encoder. Based on the predicted future trajectories, several charging piles with the least extra movements were selected and recommended for the idle electric taxis. The simulation results show that CPRM-IET can achieve preferable results in terms of charging extra movement and root mean square error, which reflects that CPRM-IET can accurately predict the future trajectories of idle electric taxis and recommend optimal charging piles for these electric taxis.
charging pile recommendation, recurrent neural network, input attention mechanism, time attention mechanism, trajectory prediction
The National Natural Science Foundation of China (61872191)
TP393
A
10.11959/j.issn.2096−109x.2020085

贾鉴(1996−),女,山西长治人,南京邮电大学硕士生,主要研究方向为轨迹挖掘、车联网。
刘林峰(1981−),男,江苏丹阳人,博士,南京邮电大学教授,主要研究方向为移动计算、车联网、机器学习方法。

吴家皋(1969−),男,江苏苏州人,博士,南京邮电大学副教授,主要研究方向为容忍延迟网络、机会网络。
论文引用格式:贾鉴, 刘林峰, 吴家皋. 基于循环神经网络的空载电动出租车的充电桩推荐方法[J]. 网络与信息安全学报, 2020, 6(6): 152-163.
JIA J, LIU L F, WU J G. Charging pile recommendation method for idle electric taxis based on recurrent neural networkJ]. Chinese Journal of Network and Information Security, 2020, 6(6): 152-163
2020−04−20;
2020−07−03
贾鉴,jj781148650@163.com
国家自然科学基金(61872191)
