虚实结合的工业机器人实验教学方法
2020-12-16朱新杰王庆九顾大强杨将新
朱新杰,王庆九,顾大强,杨将新
(浙江大学 机械工程学院,浙江 杭州 310027)
工业机器人是综合应用计算机、自动控制、自动检测及精密机械装置等高新技术的产物,是技术密集度及自动化程度很高的典型机电一体化加工设备[1]。日本工业机器人协会(JIRA)给出的定义是:一种装备有记忆装置和末端执行器,能够转动并通过自动完成各种移动来代替人类劳动的通用机器[2]。工业机器人是“中国制造2025” 的重点发展领域,是构成“智慧工厂” 和 “智能物流” 的核心要素,其发展水平和应用规模将在一定程度上决定我国由制造大国向制造强国转型的深度和广度。为适应 “新工科” 背景下的人才培养要求,越来越多的高校增设了 “机器人” 专业,传统工科专业也纷纷开设工业机器人课程,并开展与之相关的实验教学[3-10]。
工业机器人需要适应不同的应用场景,结构类型较多,在实体教学中,受条件限制通常只能以一两种类型为代表进行介绍。但借助计算机技术,可在应用软件里集成虚拟仿真模块,可选择不同的产品型号,搭建虚拟场景、编写调试程序并仿真运动轨迹。配合机器人实体,采用 “虚实结合、软硬兼施” 的方法,可使学生通过由表及里的观察、由浅入深的理解、由简到难的应用,循序渐进地开展实验项目,大大提高实验效率。另外,在经过基于软件的虚拟仿真过程后,可使学生熟悉机器人性能,降低了直接上机操作带来的风险[11-16]。
本文以三菱工业机器人为例,介绍 “虚实结合”方法在工业机器人实验教学中的应用实践。
1 实验方案设计
1.1 实验组织形式与步骤
学生以小组为单位进行实验,每组3 人,整个实验课程包括以下4 部分内容。
(1)由指导教师集中介绍课程内容,讲解工业机器人的知识点,示范机器人实验平台的操控方法并演示例程,学生分组对照平台实物阅读教材、资料与图纸,熟悉实验器材,了解实验任务。
(2)在计算机上运行工业机器人配套软件,建立工程文档,设定合理的参数,编写合适的程序,开展虚拟仿真实验,并进一步熟悉机器人的运动特点与控制方法。
(3)在充分了解机器人的操作方法、注意事项及应急措施后,可以给机器人实验台上电进行实际操作,搭建真实的工作场景,下载调试控制程序,测试运行结果直至正确完成实验任务。
(4)各小组整理材料,撰写实验报告,指导教师按组依次问辩检查实验成果,视问辩情况现场布置附加考核内容进行当场测试。
1.2 实验器材
各小组的实验器材包括:
(1)三菱RV 型工业机器人实验台;
(2)Dell 品牌台式计算机;
(3)机器人资料文档与参考书籍;
(4)实验台机械、电气图纸与示例程序;
(5)数据线和连接线;
(6)慧鱼(Fischer)创意构件组合包;
(7)工具箱。
1.3 实验任务
本实验选取物料搬运作为实验任务,这是一种常见的工业机器人工作场景,也是构成很多其他复杂应用的一项基本功能。一个独立的搬运过程可以分解为以下几个步骤:①抓手就位;②快速移动至抓取近点;③慢速移动至抓取目标点;④抓取物料;⑤慢速退回至抓取近点;⑥快速移动至放置近点;⑦慢速移动至放置目标点;⑧放置物料;⑨慢速退回至放置近点;⑩抓手复位。如图1 所示,其中P0点为抓手待命点,P1点为抓取目标点,P2点为放置目标点。

图1 搬运过程的动作分解
2 虚拟仿真实验
2.1 机器人编程软件
三菱RT ToolBox3 软件是用于对三菱工业机器人进行参数设置、文档编辑、程序调试和状态监视的软件,其功能强大,编程方便[17]。软件有 “离线”“模拟” 和 “在线” 三种模式,一般在 “离线” 模式下编程,“模拟” 模式下虚拟仿真,“在线” 模式下联机调试。
图2 所示为工程设置界面,可以设定工程名称、选择机器人规格型号、设置通信参数、添加附加轴、编辑工具坐标和工件坐标等。
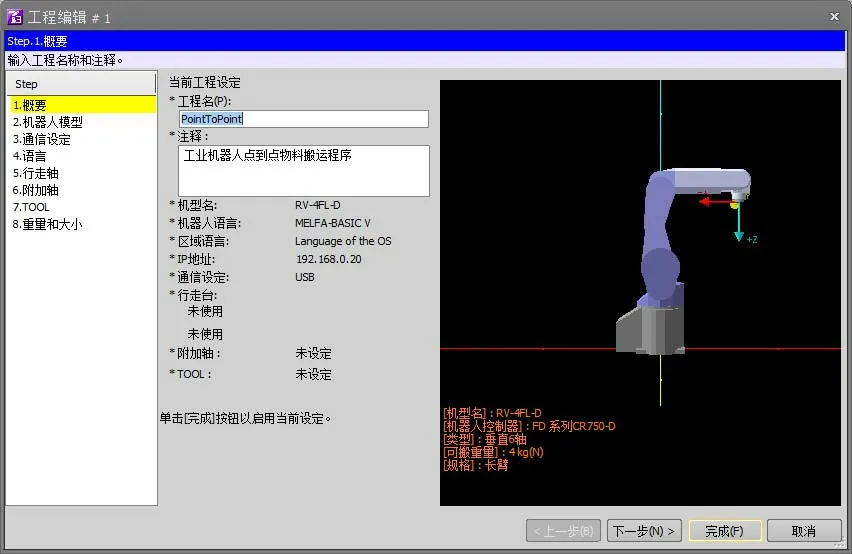
图2 工程设置界面

图3 程序编辑界面
软件的程序编辑界面如图3 所示。屏幕上方为常规的工具栏和菜单,下方为状态栏,中间左侧为工程文件列表区,屏幕中部为编辑区,其中上方为程序指令编辑窗口,下方为位置变量编辑窗口。
2.2 物料搬运程序分析
采用MELFA-BASIC VI 指令编写的三菱工业机器人物料搬运程序如图4 所示,由撇号“’” 引导并显示为绿色的内容为程序中的注释文字。
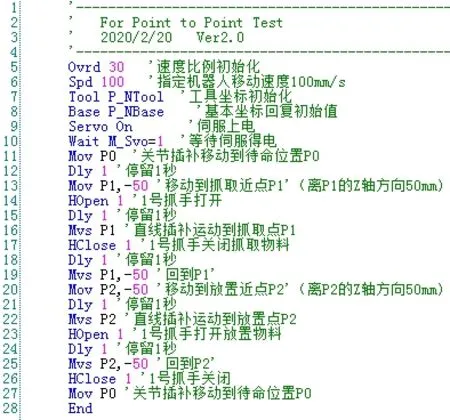
图4 物料搬运程序
2.3 虚拟仿真调试
程序编辑完成并经语法检查无误后,可通过点击工具栏中的 “模拟” 按钮进入虚拟仿真模式,如图5所示。界面左上方为模拟操作面板,能够执行JOG 运行、自动运行、直接指令运行以及调试运行,实时显示程序状态、位置数据和报警信息;中间区域为3D运行显示屏,能动态仿真机器人各轴当前位置与运动过程,用户可以通过配置文件添加虚拟工作台、虚拟流水线和虚拟工件,进行机器人工作环境的布局,使用鼠标可以拖动、缩放当前显示窗口,可以选择不同视角进行全方位全过程监视。右上方是抓手设计界面,以模块组的形式提供抓手部件,模块的形状、尺寸和位置都可以自由设置,使用方便,设计完成的抓手连接在机器人末端法兰盘中心。下方为程序监视窗口,可动态跟踪当前执行的程序行,方便调试查看。

图5 虚拟仿真调试界面
顺利完成虚拟仿真部分的实验内容后,学生能够掌握机器人程序的编写规则和调试方法,并且对机器人的机械结构、电气连接和安全性能有进一步了解,为下一环节的实践操作打下了基础。
3 工业机器人实践操作
3.1 实验台的构成
实验台以三菱RV 型工业机器人为核心构建,机器人本体安装在实验台基座上方,控制器安装在基座柜体内,示教器悬挂在柜体的右侧,柜体左侧上方安装了机器人工作模式切换开关盒,基座连同柜体的尺寸为80 cm×100 cm×60 cm,基座上还有一个小型装配工作台。实验台外形如图6 所示。
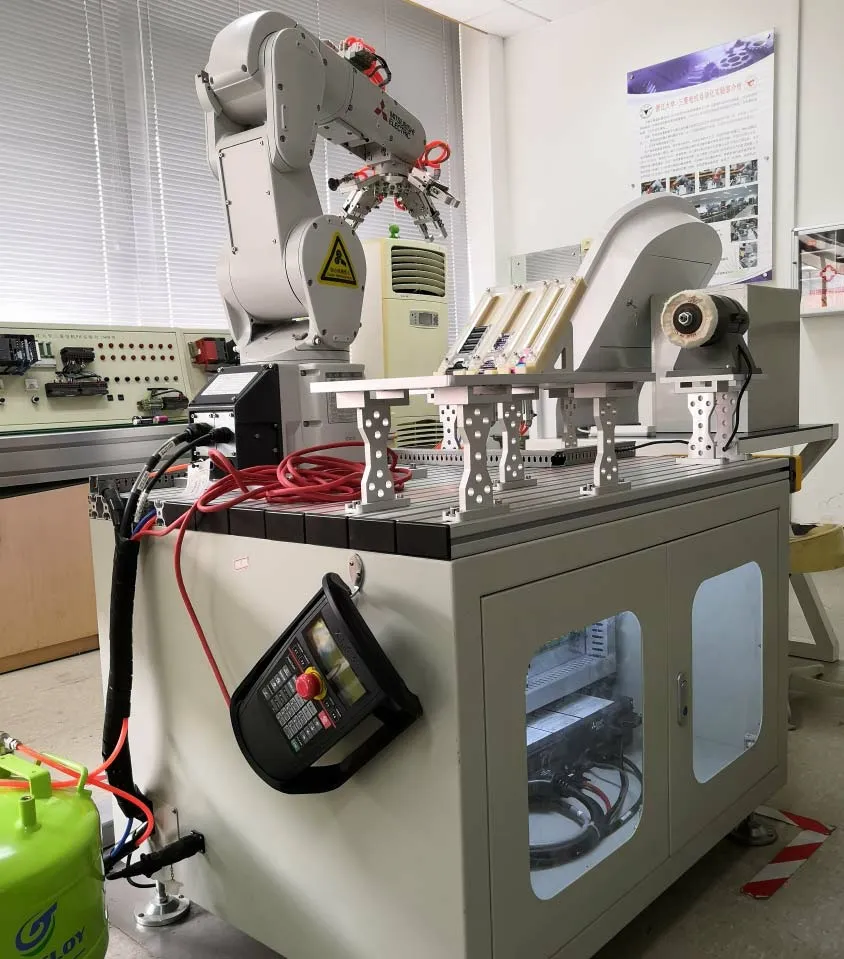
图6 三菱RV 型工业机器人实验台
所采用的三菱RV-4FL-1D 是一种垂直多关节型工业机器人,机身较小巧,广泛应用于小部件搬运、组装与检验。机器人本体由6 轴串联组成,从下至上编号J1—J6,分别由6 个伺服电机带动,末端可以定位到特定空间的各个位置,重复定位精度为0.02 mm,最大动作半径为649 mm,最大可搬运重量为4 kg,最大合成速度为9 048 mm/s。配套的CR751-D 型控制器的外形尺寸为430 mm×425 mm×98 mm,由AC220V供电[18]。示教器型号为R33TB,通过液晶屏界面进行人机交互。
机器人第6 轴的末端是一个法兰盘,我们根据实验项目需要在其上安装了一个组合工具盘,包括3 个气动抓手与1 个气动吸盘,用于拾取不同形状和大小的工件,分别由连接到机器人控制器内部的4 只电磁阀控制开/关动作。空压机提供的压缩空气经过储气罐后连接到机器人的气路系统,实验用气压一般调节到0.3 MPa 左右。
实验台还提供了一些慧鱼创意组合构件用于实验场景的搭建。
3.2 联机实验操作步骤
实验台上电后,若无报警信息,即可开始联机实验。学生通过示教器或计算机操控机器人实体,包括以下实验步骤:
(1)在实验台基座的装配工作台上指定P1和P2位置,搭建物料放置架,将待搬运物料放置到P1处的架子上;
(2)在计算机软件中打开上一个实验内容中已成功虚拟仿真运行过的工作区文件;
(3)用USB 线连接计算机与机器人控制器后,选择软件端进入 “在线” 状态;
(4)转动实验台左侧面的工作模式开关到“手动模式” 档,将机器人程序在线写入控制器;
(5)通过示教器的手动JOG 操作,确定程序中定义的三个位置,即抓手停留待命位置P0、抓取工件位置P1和放置工件位置P2,并下载到机器人控制器;
(6)切换实验台到自动运行模式,通过机器人软件控制运行,测试程序;
(7)调试完成后,可以脱离计算机,通过启动、停止按钮进行自动生产作业。
图7 所示为实验台机械臂气抓搬运LED 手电筒后端盖的工作场景。
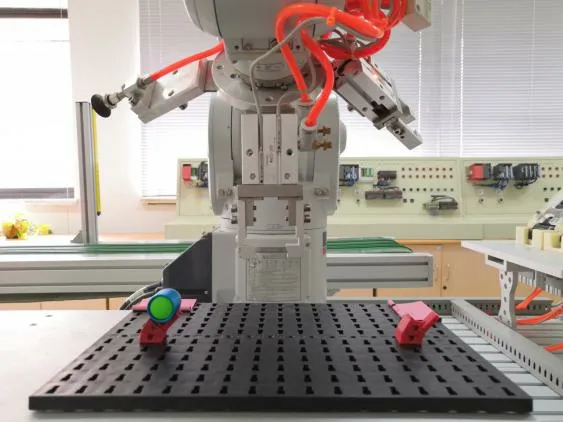
图7 机器人搬运物料工作场景
3.3 机器人操作注意事项
工业机器人多应用于工业场景,属于高、精、密型设备,对相关人员的素质要求较高,一般需由专业人员操作和维护。在实验教学中,除了常规的实验室安全规则外,还需要提醒学生注意以下事项,以确保安全。
(1)在手动操作机器人时,同时必须只能有一人通过一种设备(示教器或计算机)操作,且必须确保在机械臂的最大活动范围内没有障碍阻挡(包括人员与物件)。
(2)每个小组必须有一名学生负责急停按钮(实验台左侧面的按钮盒上或示教器上任选一处),紧盯机器人运行动作,一旦发现异常倾向立即按下急停按钮,确保安全。
(3)进入自动模式前,需注意 “速度比率” 的设置,在运动不确定的情况下以较小数值(越小越慢)为宜。
(4)在正常使用时,不可以用力推拉机器臂,不可以带电插拔数据线和电气连接线。
4 结语
结合虚拟仿真技术开展工业机器人应用实验教学,可使学生通过计算机软件进行预操作、预演练,在实际使用机器人设备之前就能充分熟悉并掌握其使用方法和调试技术,可增加实验灵活性,且有效避免因不当操作对人员和设备带来的伤害。
自2017 年秋季学期起,我们在面向机械工程专业高年级本科生的探究性实验课程中开展了以 “虚实结合” 为主要特征的工业机器人实验教学实践,实验对象包括以三菱为代表的日系机器人品牌和以ABB 为代表的欧系机器人品牌,收效良好。这种“虚实结合”的方法丰富了实验内容,提高了实验效率,创新了实验形式,是一种可复制、可推广的教学模式。
