视觉识别在自动驾驶中的应用
2020-12-15周奇丰
周奇丰


摘 要:文章从自动驾驶汽车的基本解决方案分析,讲述了视觉识别在自动驾驶车辆中的重要性。从传统模式识别框架分析汽车是如何利用摄像头来区分障碍物。介绍了人的视觉机理和深度学习的相关理论。从过程中分析图片数据库的重要性。文章主要介绍了视觉识别技术在自动驾驶汽车中的应用和发展。
关键字:视觉识别;自动驾驶
中图分类号:U495 文献标识码:A 文章编号:1671-7988(2020)22-29-03
Abstract: This paper analyzes the basic solutions of self-driving cars and describes the importance of visual recognition in self-driving vehicles. Analysis of how cars use cameras to distinguish obstacles from traditional pattern recognition frameworks. This paper introduces the relevant theories of human visual conception and deep learning. Analyze the importance of a picture database from the process. This paper mainly introduces the application and development of visual recognition technology in self-driving cars.
Keywords: Visual recognition; Self-driving
CLC NO.: U495 Document Code: A Article ID: 1671-7988(2020)22-29-03
前言
近年来,随着人工智能技术快速发展,无人车和自动驾驶这种跨行业的应用场景得到了长足的进步。国内百度,腾讯,阿里等企业纷纷进入到了无人车的研发中,国外的Google,Uber等也投入了大量的精力到无人车的研发。本文仅仅浅谈视觉技术在自动驾驶汽车中的应用。
1 视觉识别与自动驾驶
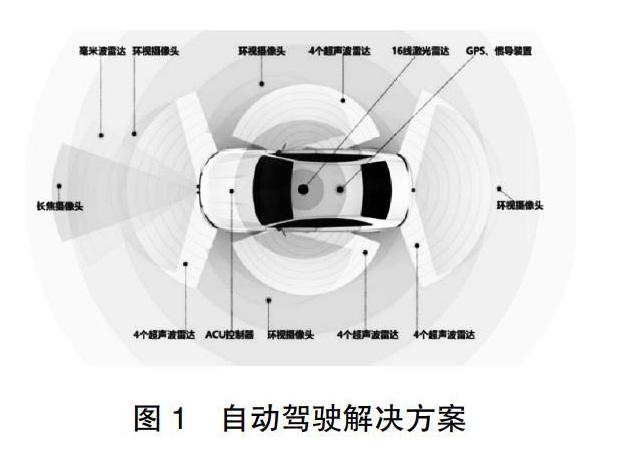
目前车企采用的无人驾驶方案所采用的传感器基本上都是超声波传感器,毫米波雷达,激光雷达和视觉摄像头。其中超声波雷达一般用在倒车雷达等辅助装置上,高速情况下会失效。毫米波雷达(Radar)主要是远距离探测,探测距离可以达到250m左右。激光雷达(Lidar)也是目前使用最多的传感器,可以实现360°,三维探测,但是造价较高。本文重点摄像头成本适中,可以分辨出障碍物的大小,采用双目摄像头可以识别距离,并且通过图像处理学习,可以识别出物体种类[1]。但是摄像头和人眼一样,会受到视野的影响,也会受到恶劣天气的影响从而造成误判。比如2016年特斯拉Autopilot模式下全速撞上左拐白色大货车,事后分析原因,一个是大货车底盘较高,特斯拉未检测到,还有一点就是特斯拉视觉系统在强光下把白色拖车的白色车身误认为是一朵白云。在经过这次事件后,特斯拉升级了Autopilot2.0版本,环绕车身共配备了8个摄像头,视野范围达到了360°,对周围的环境检测距离最远可达250米,12个新版超声波雷达作为视觉系统的补充,可以探测柔软或者坚硬的物体,传感距离和精确度比上一代提升了1倍。增强版本的前置雷达,可以穿越雨,雾,灰尘,甚至前车的下方空间进行探测,为视觉系统提供更加丰富的数据。2018年大疆发布了无人机Mavic Air,其中搭载了7个摄像头的视觉感知系统,实现了三维环境的感知。所以无论是无人车还是无人机,视觉感知都起到了无比重要的地位[2]。在自动驾驶中,视觉识别为何如此重要?雷达的立体全方位探测,精度高,但是由于计算量大,有延时,价格昂贵,短期内无法大范围普及。而采用双目摄像头,可以将拍到的景物实时转化为距离,从而实现碰撞预警,车道偏离预警等功能,并且价格低廉,适合目前车辆。
2 计算机视觉与传统模式识别框架
汽车是如何通过摄像头识别区分障碍物的呢?
首先我们需要了解一下基本概念。计算机视觉,就是用各种成像系统代替视觉器官,作为输入手段,由计算机代替大脑完成处理和解释。模式识别,一是研究生物体是如何感知对象的,二是在给定的任务环境下,如何用计算机实现模式识别的理论和方法。
传统的模式识别方法分为4个步骤。低维感知,一般通过矩阵,像素的方式使图片可以被计算机所识别获取,即把图片读入电脑,是信息获取的过程。预处理指的是把图片进行矫正,解决图像的倾斜,噪点等问题。特征提取选择是传统的模式识别非常重要的一个步骤。例如,对于数字的识别,每一个阿拉伯数字都有相应的特征,如何选取每一个数字的特征是关键。举个例子,对于0和1的识别,我们实际处理中可以提取在x轴上的像素投影特征就可以区分0或1。对于其他的数字识别,可以选择其他的特征进行提取,比如X轴,Y轴,投影特征,几何重心特征,旋转不变性特征等,或者几个特征综合运用。在特征提取选择过后,我们才可以对图像进行预测感知识别等操作[3]。
对于传统的模式识别,有以下几点需要注意。传统的模式识别方法必须依赖良好的特征提取选择,这个对于最终识别的准确性起到了关键性的作用。识别系统的主要计算集中在特征提取选择部分。特征的樣式目前都是人工设计的,靠人工来提取特征,如果人工提取特征有缺失,那么我们模式识别的准确性也会降低。
3 人的视觉机理和深度学习
计算机视觉技术的研究框架和人类的学习框架类似。1981年诺贝尔医学奖获得者David Hubel发现了视觉系统的信息处理机制。(1)人脑视觉系统的信息处理是分级的。(2)并且通过层次网络结构逐层传递,从低层到高层,特征表示越来越抽象,越来越能表现语义。(3)抽象层面越高,存在猜测的可能性就越小,就越利于分类。所以人类视觉信息的传递不是单纯的几何特征或者物理特征来实现对物体的视觉感知或者识别,而是通过逐层的映射形成抽象的特征最终实现物体的识别。这个发现给计算机视觉技术提供了巨大的启示。加拿大科学家Geoffrey Hinton把视觉系统的信息处理机制和计算机学习结合起来,提出了深度学习的观点:人工神经网络多感知层次的比单感知层次的好,更接近于人大脑的神经元的结构;深度学习可以通过逐层初始化(逐层初始化可以通过无监督学习实现)解决训练的难度。说的通俗一点,就好比第二段中提到的模式识别,传统的模式识别必须依赖人工设计的特征,这需要大量的专业领域知识,而特征提取的好坏直接影响到到了结果。深度学习作为一种自动特征学习方法,把原始数据通过一些简单的但非线性的模型转变成为更高层次的、更加抽象的表达。通过足够多的转换组合,非常复杂的函数也可以被学习。简单来说,深度学习使用一种通用的学习过程从数据中学习各层次的特征,而不是手工设计特征提取。
4 图像数据与物体识别
随着互联网的快速发展,在互联网中产生了大量的图片,这些图片其实就是一个庞大的数据库。汽车之所以可以通过摄像头识别出各种障碍物,识别出路面上物体的种类,这个要归功于深度学习的快速发展。而深度学习则需要大量的数据来进行训练来提高视觉识别的准确性。华裔科学家李飞飞发布了包含了1500万张图片,2.2万个类别的IMAGENET数据集,用于视觉识别的研究。自动驾驶技术和视觉识别技术的融合提高了现代汽车智能化。
5 总结
笔者在本文中主要讲述了:
(1)自动驾驶的基本解决方案;
(2)通过案例讲述了视觉识别技术在自动驾驶中的重要作用;
(3)传统模式识别的基本框架;
(4)人体的视觉机理和深度学习的起源;
(5)图像数据库对于视觉识别重要性。
视觉识别技术只是自动驾驶感知系统中的一部分,目前车辆上主要用于辅助驾驶,距离真正意义上的自动驾驶还有很长的一段路。并且其本身对于光线要求高、只能获得2D平面数据、数据处理延迟、地面异形识别障碍、工作易受外部条件干扰等等缺陷,均需要毫米波雷达、激光雷达等硬件补足。只有和其他传感器共同作用时,才可以构建出真正的自动驾驶车辆。
参考文献
[1] 蒋文斌,彭晶,叶阁焰.深度学习自适应学习率算法研究[J].华中科技大学学报(自然科学版),2019,(5).79-83.
[2] 姜灏.一种自动驾驶车的环境感知系统[J].电子制作,2018,(15). 70-73.
[3] 谭力凡.机器视觉与毫米波雷达融合的前方车辆检测方法研究[D].湖南大学,2018.
