基于MPC车道保持功能的仿真平台研究
2020-12-15郭丹丹孙诚骁
郭丹丹 孙诚骁

摘 要:在汽车领域,智能驾驶技术方兴未艾。为了保证新产品的应用,建立快速且行之有效的测试手段成为必然趋势。文章采用dSPACE软硬件建立了一套完整的自动驾驶仿真测试平台,通过引入MPC车道保持算法并进行有效仿真及对比,验证了该平台的通用性,为ADAS及自动驾驶技术提供可靠的仿真测试解决方案。
关键词:MPC;ADAS;硬件在环仿真;摄像头模型
中图分类号:U462.1 文献标识码:A 文章编号:1671-7988(2020)22-22-04
Abstract: With the growing maturity of ADAS and automatic driving, finding a rapid and feasible testing method is an inevitable trend. This paper built an integrated testing system as well as simulation platform for automatic driving function based on dSPACE software and hardware. Then an MPC algorithm was introduced and simulated in order to verify the versatility of this platform. This paper promoted a reliable testing solution for ADAS and automatic driving system.
Keywords: MPC; ADAS; Hardware in loop; Camera sensor modelCLC NO.: U462.1 Document Code: A Article ID: 1671-7988(2020)22-22-04
前言
在汽车智能化趋势的推动下,ADAS功能开发已成为研究热点。随之而来的问题是如何针对ADAS功能快速进行测试。如果采用国标、欧标定义的实车测试规范,需要耗费大量的人力、物力以及时间成本,因此需要开发一种新型测试平台解决以上成本的消耗的问题。本文介绍了一种基于dSPACE平台开发的硬件在环仿真(HiL)系统,可以在初期即完成ADAS功能的测试。本文通过对于一种MPC车道保持算法的仿真调试,证明该平台的通用性,可以缩短ADAS开发周期,减少成本的投入。
1 MPC车道保持算法
模型预测控制(Model predictive control,MPC)是20世纪60年代逐步发展并日趋完善的现代控制理论。MPC对被测对象建立预测模型,在每一个采样时刻通过模型进行有限时间的状态预测以及误差预测,并通过性能指标的最优化来确定下一时刻的控制输入,以此达到控制目标。MPC通常包含模型预测、滚动优化及反馈校正三个环节[1]。
MPC由于其控制效果好,鲁棒性强,输入约束可控,能反映一定时间内的预测信息,特别适合作为自动驾驶的控制算法。本文所使用的ADAS车道保持系统采用的MPC算法核心如下[1]:
其中H为Hessian正定阵,它代表着目标函数的二次方部分,f为一次方部分。QR为权重矩阵,e为跟踪误差,Θ为预测窗口内状态方程系数迭代形成的矩阵,ρ为权重系数。在实际控制系统中,控制输入往往受到环境约束,二次规划的优势是可以将这些约束也纳入到整个规划的过程中去,具体参数设计请参考文献[4]。
2 基于dSPACE的ADAS硬件在环系统
硬件在环(Hardware in Loop,HiL)系统是一种半物理仿真测试手段。该系统模拟实车运行时的电气信号,为被测控制器提供虚拟外围环境,从而完成测试。HiL系统的使用可有效节省成本,加速整个开发进度,满足当前市场的快速迭代需求。
dSPACE实时仿真系统是由德国dSPACE公司开发的一套基于MATLAB Simulink的控制系统开发及半实物仿真的软硬件工作平台。包括实现代码自动生成、下载和试验、调试的整套工具。本文采用dSPACE平台搭建了一套完整的测试系统。HiL平台通过仿真模型驱动IO设备对待测控制器的外围环境进行模拟,从而实现功能测试的目的。其结构如下:
其中,上位机是人机交互的平台。实现仿真模型的搭建、工程的配置以及对于整个平台的监控。仿真模型对于HiL仿真是至关重要的部分。本文采用一套基于Matlab/Simulink搭建的,包含动力、传动、运动学、传感器、环境等完整的仿真模型。能够准确模拟ADAS对车辆的辅助操作行为、车辆实时姿态及路径、环境及路面激励的响应。下位机又叫实时仿真机,它是仿真模型运行以及信号收发的基础设备。
本文中ADAS在系统运行时,车辆模型模拟出真实汽车的运动状态,传感器模型模擬出车道线、路肩、交通流等信息,通过通讯口将信号传递给ADAS控制器。ADAS控制器通过传感器融合,路径规划、控制算法输出横向执行器需要的执行量,反馈到车辆模型中,形成闭环控制。
3 仿真模型
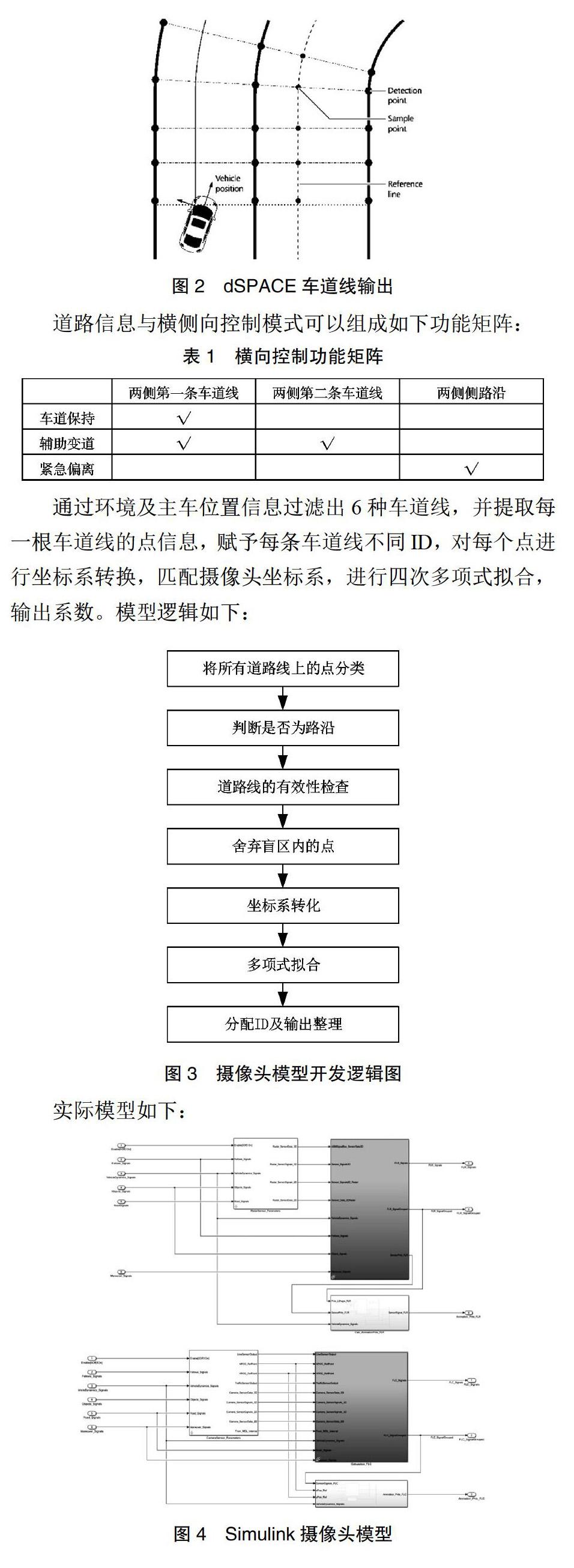
本文采用dSPACE提供的ASM模型,ASM 整车模型主要有五大部分组成:控制器模块、发动机模块、动力传动模块、车辆动力学模块、驾驶环境模块。该模型为成熟商用模型[6]。需要指出的是,ASM模型输出的是道路环境真值(Ground truth),而被测ADAS控制器所需信号是经过摄像头处理的,所以需要对ASM提供道路真值进行二次开发,匹配真实信号。下面介绍摄像头模型二次开发方法。
3.1 摄像头模型
本文所涉及的ADAS控制器,需要前摄像头、前雷达与前角雷达组成传感器矩阵采集的数据作为输入,对传感器输入数据进行融合后交由ADAS控制器进行判断。而本文所采用的MPC算法,主要依靠摄像头的采集信息,所以摄像头模型的输出信号需要与ADAS的真实摄像头输出信号匹配。
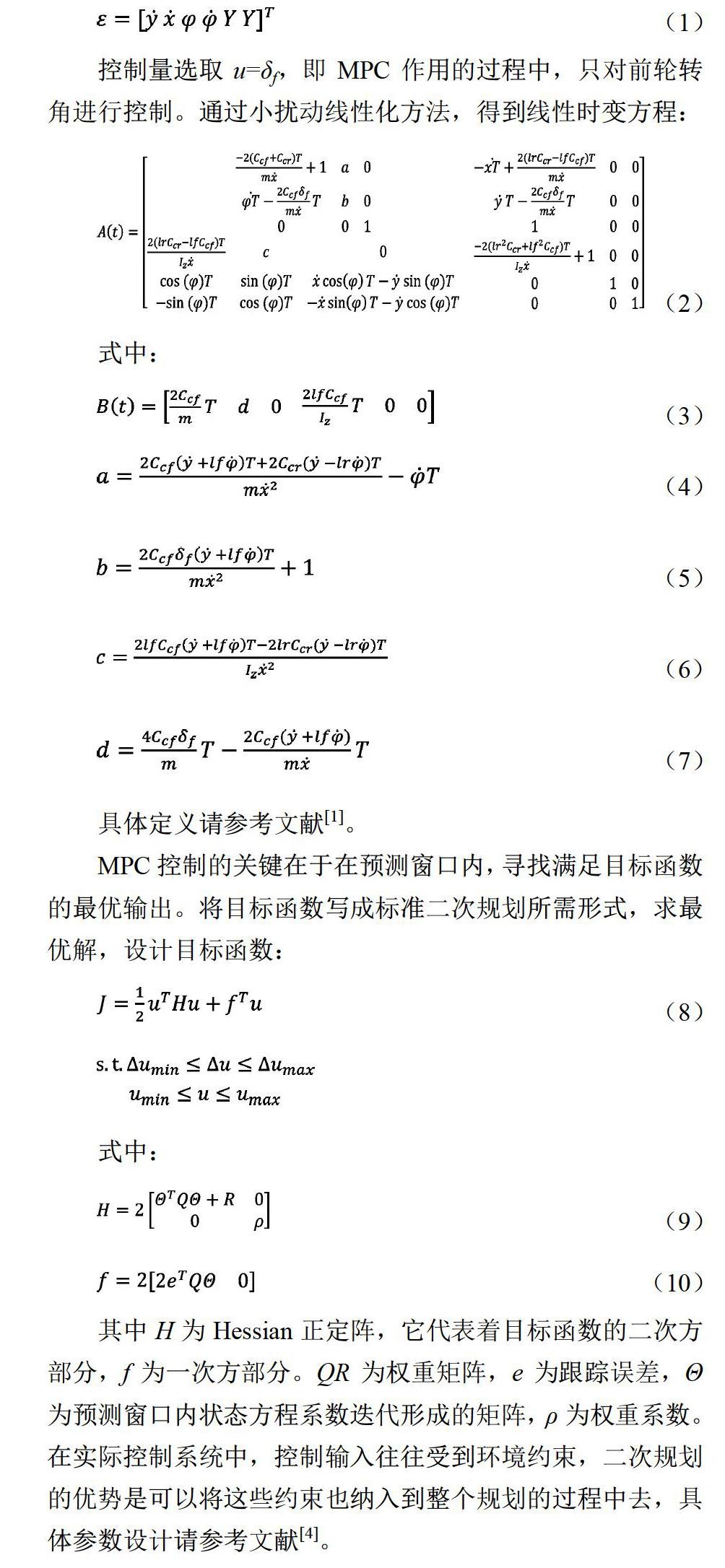
本文基于dSPACE的车道输入将前方车道分成六类,左侧、右侧第一条车道线,左侧、右侧第二条车道线,左侧、右侧路沿。
4 仿真及验证
本文旨在验证仿真平台的适用性。将第二节所建立的MPC算法生成代码并下载入ADAS控制器中,通过dSPACE Modeldesk生成道路场景,自车速度为15m/s,车道宽度为3.5m,道路为1000m直道,起始位置为车道中心线左侧0.5m,车头朝向与道路方向平行,采用MPC算法与PID算法分别在仿真平台上运行,得到结果如下:
通过仿真结果可以看到,采用MPC控制算法可以将自车在5s内从偏离车道0.5m的位置拉回正中,并且在整个过程中,由于目标函数的作用,控制量过渡迅速且幅值震荡小。而采用PID算法,控制量的幅值震荡较大,且横向距离收敛到0的时间需要9.5s。在同样的道路环境下,本文所采用的MPC算法由于加入了目标函数,限制输入量的上下限及变化率,在驾驶感受上能够更好地辅助驾驶员进行车道保持。
5 结论与展望
本文介绍了一种运用dSPACE软硬件搭建仿真平台的方法,并且提出摄像头模型二次开发的思路。本文通过该仿真平台模拟车辆真实行驶过程,对两种不同的ADAS车道保持功能的表现进行测试并分析结果。采用本平台,不仅可以对横向控制算法进行调试验证,诸如AEB,ACC,LKA等L2甚至L3,L4级别的自动驾驶算法都可以在本平台上进行有效的测试。未来,本平台还可扩展出使用视频流注入、点云信号注入、高精地图信号注入的自动驾驶域集成仿真。可对多传感器融合,高精定位等高级功能进行更深入的探索。
参考文献
[1] 龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制[M].北京:北京理工大学出版社,2014.
[2] M. G. da Silva Jr, Model Predictive Control of a Mobile Robot Using Linearization[J].Proceedings of the Mechatronics and Robotics 2004,pp. 525-530.
[3] 罗莉华.基于MPC的车道保持系统转向控制策略[J].上海交通大学学报(自然版), 2014, 48(07):1015-1020.
[4] Falcone P.Nonlinear model predictive control for autonomous vehicle [D]. Benevento: Universitàdel Sannio, 2007.
[5] 席裕庚,李德偉,林姝.模型预测控制—现状与挑战[J].自动化学报, 2013, 039(003):222-236.
[6] 马培蓓,吴进华,纪军,等.dSPACE实时仿真平台软件环境及应用[J].系统仿真学报,2004(04):57-60.
