内波环境下的时频匹配场定位方法
2020-12-15李永飞赵航芳
李永飞,赵航芳,2,3
(1.浙江大学 信息与电子工程学院,浙江 杭州 310063;2. 浙江省海洋观测-成像试验区重点实验室,浙江 舟山 316021;3. 海洋感知技术与装备教育部工程研究中心,浙江 舟山 316021)
海洋信息学是一门将海洋与信息相结合的科学。海洋是物理的海洋,利用海洋基础知识能够对海洋中的波、潮、流、环等进行地球物理流体动力学建模,提供信息处理以先验知识;海洋也是信息的海洋,利用信息理论准则能够对逆问题进行推断。而匹配场处理(matched field processing, MFP)就是将地球物理流体动力学模型与信息学中的利用阵列信号的逆问题推断相结合的典范,充分利用了地球物理流体动力学特性来获得优良的定位性能,尽管目前MFP还主要利用的是声波传播知识,对海洋中其他的波如表面波和内波、潮、流、环知识的利用有待进一步开发。Bucker[1]提出匹配场处理的概念,并证明了声场在空间复杂度足够的情况下可以用来进行声源定位。Fizell等[2]进行匹配场被动定位演示实验,证明了匹配场的实际应用价值。但是,伴随着匹配的往往是失配问题。从匹配场的提出到如今,一直限制匹配场技术迈向实际应用的就是海洋环境的不确实性,这些不确实性会引起拷贝向量的不确实性,最终导致失配[3]。常见的失配包括:环境失配、统计失配与系统失配[4]。本文的出发点是解决由孤立子内波(以下简称内波)引起的环境失配问题。
内波广泛存在于大陆架区域,它会引起声场的耦合,使得声场结构在深度与距离上重新分布[5],影响声场的时间相关半径[6],进而使常规匹配场(conventional MFP,CMFP)的定位性能下降。Daugherty等[7]研究了表面波、内波和声源的运动对匹配场处理的影响,认为内波极大地影响了匹配场处理的性能。但目前关于内波与声波交互的研究大多停留在内波参数对声的影响[8-9]及存在内波情况下的声场建模[10-11]等正问题上。关于逆问题推断的研究,如存在内波环境下的声源定位等,相对较少。因此,对于此类问题的研究具有重要意义。
近年来,信号处理也由原来的单独的时域或频域处理向着时频域发展的趋势。时频域为宽带信号的处理提供了一个便利的框架,海洋环境引起的色散特性能够在时频域有所体现[12-13]。另外,时频信号处理更是在模分离方面有着天然优势,例如,warping变换就是在时频域上对低频信号的模态在单水听器上进行分离[14],其所利用的物理性质就是不同号模在时频域上是分离的,并用于浅海负跃层环境下的声源定位[15]。本文也正基于此性质在时频域上对存在内波时信号进行处理与定位。
在波导环境中,不同号模的传播速度是不同的,因而耦合模与未耦合的模在时频域是分离的。本文提出的时频匹配场处理方法(time-frequency MFP, TFMFP)能够在无任何先验信息的情况下,在时频域内对由内波引起的模耦合进行抑制,从而对声源进行正确的定位,从一定程度上解决了内波引起的环境失配问题。仿真结果验证了该方法在内波环境下能够对声源进行正确定位,在无内波环境下与传统匹配场性能相近。
1 时频匹配场方法
内波在沿着声线路径传播时会引起声场的耦合。在一个距离有关环境中,二维的声场可以用模深度函数不变的耦合简正波模型表示:

(1)
式中:z表示深度;r表示距离;N表示模的数量;an(r)表示第n号模的模深度函数;an(r)表示第n号模的水平波数。声场由内波引起的扰动主要体现在模幅度an(r)的变化上。
当不存在内波时,an(r)为一个常数:
an(r)=an(0)
(2)
式中an(0)表示源位置处激励起的第n号模系数。
当声源与接收阵之间存在内波时,如图1所示,在内波区域(r1与r2之间)声场不同号模之间模态会相互转变,模之间会发生耦合。此时模幅度可以表示为:
(3)
式中cnm表示m号模到n号模的耦合系数。
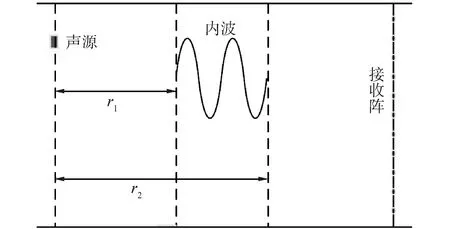
图1 存在内波时的波导示意Fig.1 Schematic diagram of waveguide with internal waves
1.1 常规匹配场处理
假设有一个全深度布放的垂直阵(以下讨论均为垂直阵),常规的频域匹配场的模糊度函数可以表示为:
B0+δB
(4)

式中R表示声源距接收阵的距离。
从式(4)可以看出,模糊度函数中增加了δB项,由内波引起的模耦合会影响CMFP的定位性能。
1.2 时频匹配场处理
CMFP一般是在频域对数据进行处理,而耦合模在频域与未耦合的模难以区分,因而导致耦合模被错误匹配,从而引起定位性能下降。为了解决这个问题,下面对本文提出的TFMFP方法进行介绍。
在波导环境中不同号模的传播速度是不同的,即它们到达接收阵的时间不同。当存在内波时,不同号模相互耦合。下面以第m号模与第n号模耦合为例进行分析:m号模在到达内波区域前以群速度cm传播,在经过内波区域后,m号模有一部分耦合成为n号模,耦合部分以n号模的群速度cn传播,而未耦合部分继续以原来的速度传播。所以最终接收到的第n号模实际上是由2部分组成的:n号模未耦合部分和由m号模耦合过来的部分。它们到达接收阵的时间是不同的。
未耦合部分的到达时间为:

(5)
由m号模的耦合部分到达时间为:

(6)
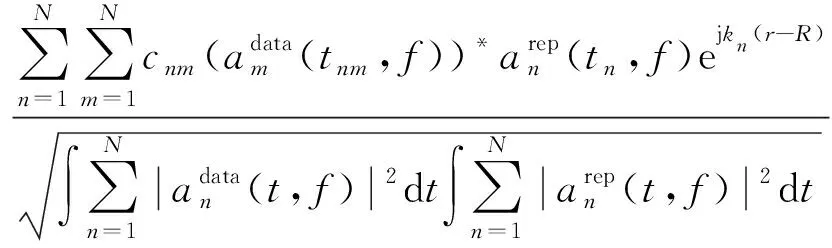
式(6)中假设内波区域远小于源与接收阵之间的距离,即图 1中r2-r1≪R。因此,耦合模与未耦合的模在时频域是可以区分的。TFMFP的核心就是抑制耦合部分的模,只匹配未耦合部分的模。本文的工作主要就是将匹配处理由单独的时域或频域扩展到了时频域。具体推导步骤如下:对照式(4),TFMFP的模糊度函数在时频域的某一频率f处,可以写为:
BMFP(r,z,f)=
(7)
在式(7)中,只有在模到达的时间处才包含有效信号,因而在分子上可以将时间的积分简化表示为不同模到达时间处数据场与拷贝场共轭相乘的和。式(7)中,第1部分表示数据场未耦合部分与拷贝场的匹配,第2部分为耦合部分与拷贝场的匹配,由于tn≠tnm,所以第2部分对模糊度函数的贡献基本为0。也就是说在TFMFP中,只有相同时间到达的同的一号模(未耦合部分)才能对模糊度函数有所贡献,这就有效地抑制了模耦合的影响。
但是在实际的海洋环境中,特别是在被动定位的过程中,信号到达的绝对时间是不可能精确地进行测量的,因此,在时频域进行匹配处理时要在式(7)的基础上通过时延τ对时间进行纠正。式(7)可以进一步表示为:
BMFP(r,z,f)=

(8)
由于绝对时间未知,在距离维度进行匹配时,那些即使在式(7)中绝对时间上匹配不到的同一号模,在增加时延后在式(8)也可能匹配到,因而式(8)相比于式(7),模糊度函数在距离维上旁瓣较高,且主瓣较宽,但是它并不影响最大值出现的位置。因为如果距离不在真实位置时,无论时延如何变化,总有一些模无法匹配,所以式(8)有更好的宽容性。此外,如果对时延τ的范围有一定的先验,就能够降低式(8)的旁瓣,并逐渐向式(7)逼近。
另外,式(8)的宽带表达式,只需将不同频率进行非相干叠加即可,本文也不再加以讨论。
2 仿真结果分析
在仿真中背景声速剖面的表达式为:

(9)
式中:D=60 m表示水深;表面声速cs=1 515 m/s;温跃层声速扰动Δc=30 m/s;温跃层深度zth=20 m;温跃层宽度Δth=5 m;海底声速为cbot=1 600 m/s。其他仿真条件为:水体密度为σ=1 000 kg/m3。底部衰减αp=0 dB/λ,海底密度为ρb=1 700 kg/m3,背景声速如图2所示,图中在温跃层位置声速变化较快,比较容易产生内波。

图2 背景声速剖面Fig.2 Sound speed profile of background
在仿真中,将内波的影响建模为声速剖面的扰动,表示为:

(10)
式中:W(z)=sin(πz)为内波的一阶模深度函数;η=4 m表示内波的幅度;λ=700 m表示内波的波长。本文仿真中,内波起始位置r1=14 km,内波结束位置r2=16.1 km。存在内波时的声速剖面如图3所示,声速在内波存在区域有很强烈的扰动。
用RAM模型分别对数据场与拷贝场进行仿真。数据场的仿真,设置声源深度为30 m,接收阵距离为27.5 km,阵元深度1~60 m,阵间距为1 m,声速剖面为图3中的声速剖面(若考虑无内波情况则用图2声速剖面)。拷贝场的仿真,设置声源深度为2~60 m,间隔为2 m,接收阵距离为25~30 km,间隔为100 m,阵元深度1~60 m,间隔为1 m,声速剖面为图2所示的背景声速剖面。利用式(4)进行常规的匹配场处理,为了简化计算,本文只取频率120 Hz处的信号进行比较说明。

图3 存在内波时的声速剖面Fig.3 Sound speed profile with internal waves
图4(a)和图4(b)分别为无内波与有内波情况下的CMFP在频率为120 Hz的模糊度函数。比较2幅图可知,无内波时,CMFP能够进行正确定位(距离27.5 km,深度30 m);在内波环境下,常规匹配场的定位结果为(距离26.7 km,深度22 m),出现了定位错误。2幅图中由于在120 Hz处基本只有前2号模的贡献,因此在距离维存在一定的模糊。

图4 常规匹配场处理模糊表面Fig.4 CMFP ambiguity surface
图5(a)与(b)分别为无内波与有内波时,发射信号为80~150 Hz的宽带脉冲信号,声源距离与深度不变,阵元深度为60 m处接收信号的时频图。从图5中可以看出,当存在内波时,1号模与2号模之间存在一个较强的耦合模,这个耦合模在时频域上与1号模和2号模是可分的。TFMFP的目标就是抑制耦合模部分,只匹配未耦合部分。对每个阵元做短时傅里叶变换,并且在每个时频图上只取120 Hz处的信号按照式(8)进行时频匹配场处理。有内波时模糊度函数如图6(a)所示,声源距离和深度都能正确估计。与图4(a)中无内波时的CMFP结果相比,TFMFP由于抑制耦合模的原因,主瓣强度有所降低。

图5 接收信号时频图Fig.5 Time frequency diagram of received signal
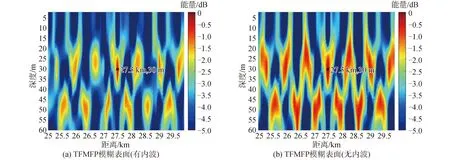
图6 TFMFP模糊表面Fig.6 CMFP ambiguity surface
下面在无内波的情况下对TFMFP的性能与CMFP进行对比。图6(b)为TFMFP在无内波的情况下的模糊表面。图7(a)和(b)分别为无内波情况下TFMFP与CMFP在源位置处距离、深度切片对比结果。虚线表示CMFP结果,实线表示TFMFP结果。从图6(b)与图4(a)对比看出:TFMFP在无内波时的性能与CMFP性能相似。从图7更进一步可以看出:TFMFP在深度维主瓣略有变窄,在距离维旁瓣略有变低,但差别并不明显。两者在极大值与极小值处区别较大,这是由于在极大值处CMFP不同号模之间为同向叠加(各号模之间匹配值夹角较小),而TFMFP为匹配值最大的某一号模的贡献,因此,CMFP在极大值处大于TFMFP;而在极小值处CMFP不同号模之间为反向叠加(各号模之间匹配值夹角大于90°),而TFMFP仍为匹配值最大的某一号模的贡献,因而,CMFP在此处值小于TFMFP。此外,TFMFP的宽带处理结果与大部分非相干叠加的宽带结果相似。

图7 CMFP与TFMFP距离深度维剖面对比Fig.7 Comparison of distance and depth profiles between CMFP and TFMFP
3 结论
1)时频匹配场处理方法能够对由内波引起的耦合模在时频域上进行分离、抑制,从一定程度上解决了内波引起的环境失配问题。
2)通过仿真验证了时频匹配场处理能够在内波环境下对声源进行正确定位,但其主瓣强度略有损失。
3)通过仿真验证了时频匹配场处理在无内波情况下,性能与常规匹配场相近,旁瓣略有降低。
由于低频信号不同模的群速度相差较大,预计该方法在低频域有着更好的表现。本文只是对该方法进行了非常初步的研究,深入的定位性能分析和高分辨算法有待进一步地深入研究。本文的方法只进行了仿真验证,有待进一步进行实际数据验证。
