参量阵声场相位特性及其海上测量方法研究
2020-12-15马忠成吕良浩曹清刚杨宝山
马忠成,吕良浩,曹清刚,杨宝山
(大连测控技术研究所,辽宁 大连 116013)
参量阵声场相位分布决定了其指向性特征和开发潜力,在实验室对其进行了细致的探究。计算和测试表明[1-2],差频波声场相位随离开基阵的距离线性增大,在接近1/3瑞利区后,相位达到稳定数值。在外场环境,尤其浅水水域,水介质微结构,如微气泡的存在,对高频声波而言并非稳定的均匀介质。而通讯、声场控制等领域尤其关注差频声场传播的相位保持问题[3-5]。注意到,外场应用的参量阵原波频段为几十千赫兹,该频段与水中大量分布的微气泡的共振频段对应。近表面海水中含有丰富的微气泡,其主要尺寸分布在30~120 μm[6-10]。在平静海况下,也发现有大量气泡分布,其密度分布规律大体相似[11]。气泡带来参量阵辐射效率的提升,但由于不确定性和浮升的本能导致其时空分布具有随机性。结果可能将引起差频波声场相位特性在空间域和时间域的不稳定。文献[3]对50 kHz原频波在1 700 m的距离上测量,发现5 kHz差频波相位随时间的变异可达1.5倍波长,认为参量阵相位缓慢起伏是海洋内波原因,快速起伏是海水微结构所致。
由于相位对位置的敏感性,外场的精细测试极为困难。而参量阵由于其指向性尖锐,更带来了调试困难。甚至利用潜水员在海底安装、调整参量阵波束[3]。文献[12]提出采用比较法测量,避免传播距离的精确测量。
本文分析了参量阵相位、波束参数与介质的依赖关系,得到介质参数对差频波相位、波束的量化表达式。在不同海况的外场环境,利用几种方法进行了测量,对不同测量方法数据及其起伏进行了对比。
1 非均匀介质中暂态参量阵声场
如图1所示,对于表面幅度分布p01(x,y)、p02(x,y)原波角频率ω1、ω2的换能器:
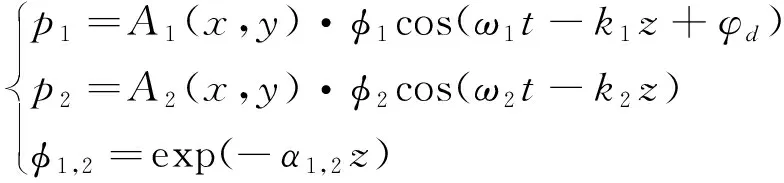
(1)
图1 差频波声场模型Fig.1 Model of difference-frequency sound field
其差频声场为[13]:

(2)
其中:
式中:(x′,y′,z′)为互作用区坐标;(x,y,z)为观测区坐标。设脉冲声波作用期间介质水平均匀,则:
(3)
式中的孔径因子对振幅均匀分布A1A2=p0p0的活塞换能器求解为:
(4)
式中:a为换能器半径;s为其面积。由于气泡导致海水声速变异的相对数值有限,因此对孔径因子和幅度的影响并不明显。
因原波频率相近,其吸收系数近似相等。当只研究参量阵轴线附近的声场时,则:

(5)
水中微气泡在30~120 μm均有分布,可认为2个原波频率下的声速相等。声波相位数值可写为:

(6)
该式表明,微气泡导致海水介质声速频散时,差频波以原波频率的声速传播。而气泡的随机性可能带来差频波相位的起伏。
2 相位的直接测量
直接测量意在发现浅海中的参量阵差频波相位的平稳性和起伏规律。海底或海面固定一个不随浪流变动的测量装置是极其困难的。同大多采用的方法类似,采用由铅鱼拉紧的软绳,在其末端固定水听器。如图2所示。参量阵固定于开阔海域南向码头,水听器由码头延伸的钢架悬挂。水听器深度4 m,水深8 m,水听器与参量阵间距6.3 m。
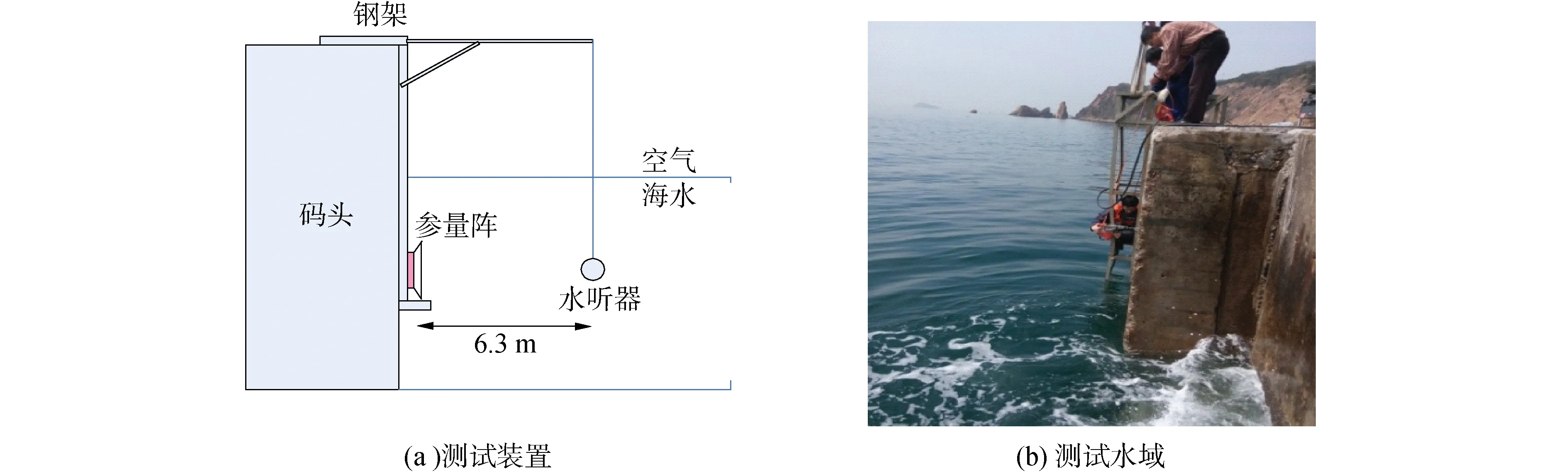
图2 码头水域测试Fig.2 Wharf waters test
矩形参量阵,尺寸0.6 m×0.5 m,原波频率f=40 kHz,其瑞利区计算为8.0 m。差频波频率F=4、2 kHz,信号长度L=30 ms,发射周期T=1 s。
考虑到浪、流导致水听器的位置变动,对每个脉冲,通过其高频原波同步测量水听器与参量阵的距离。对采集的623组数据计算相位如图3所示。
差频波相位的起伏达200°。其中存在由于气泡随机性导致的相位起伏,也有水听器位置的变动原因。取该水温下声速值,计算水听器位置实时监测如图4所示。其变动范围为6.55-6.35=0.2(m),对应0.53倍波长,与相位的起伏范围对应。
根据监测的传播距离,尝试对各个脉冲信号进行相位修正。图5表明,相位起伏程度未能降低。根据前述分析,实现个位数的相位修正,定位精度需达到毫米级。显然采用水声定位的修正方法无助于相应频段的相位测量。
由于波长的增大,水听器0.2 m的摆动范围对应2 kHz 频率0.27倍波长,该频率下差频波的相位变动范围为100°。如图6所示。
图3 4 kHz差频波的相位测试结果Fig.3 DW phase test results at 4 kHz
图4 涌浪作用下水听器位置变动Fig.4 Position variation of hydrophone under swells
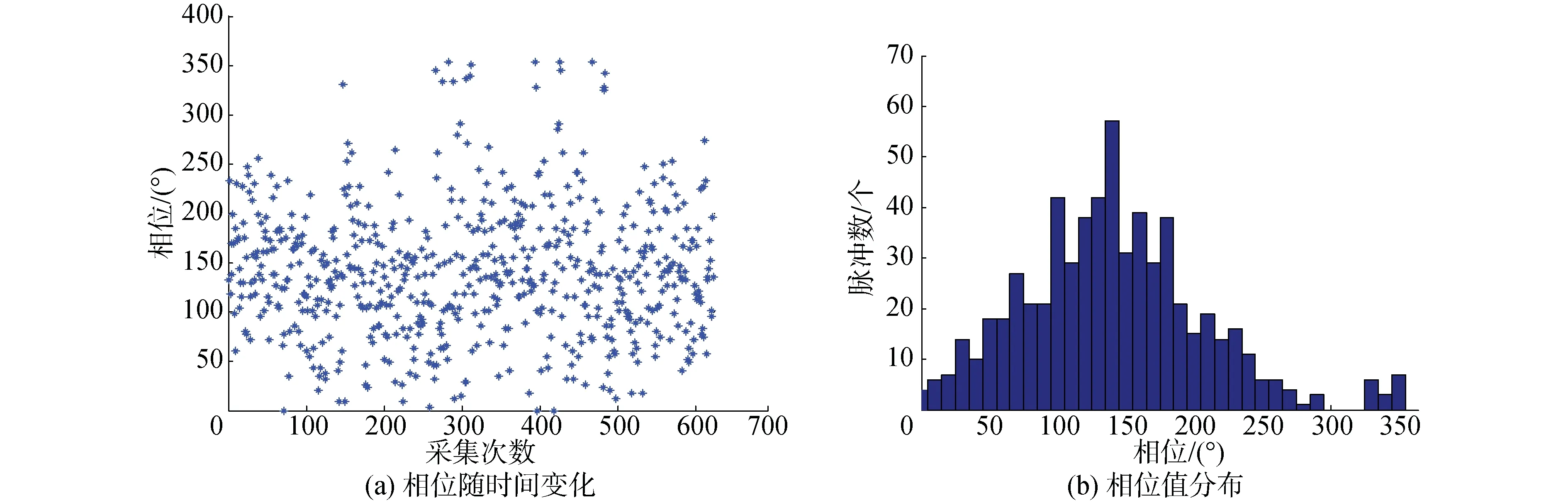
图5 根据监测位置修正的4 kHz差频波相位Fig.5 Modified DW phase based on measured position at 4 kHz
根据监测的传播距离,对各脉冲信号进行相位修正。与前述情形类似,数据离散性增大。如图7所示。
对频率为500 Hz的差频波测量,采用了18 s的长脉冲信号。类似的装置下参量阵与水听器距离为16 m。逐点计算相位,结果如图8所示。相位起伏范围约为25°~30°。相位起伏周期约为4 s,对应涌浪的周期。
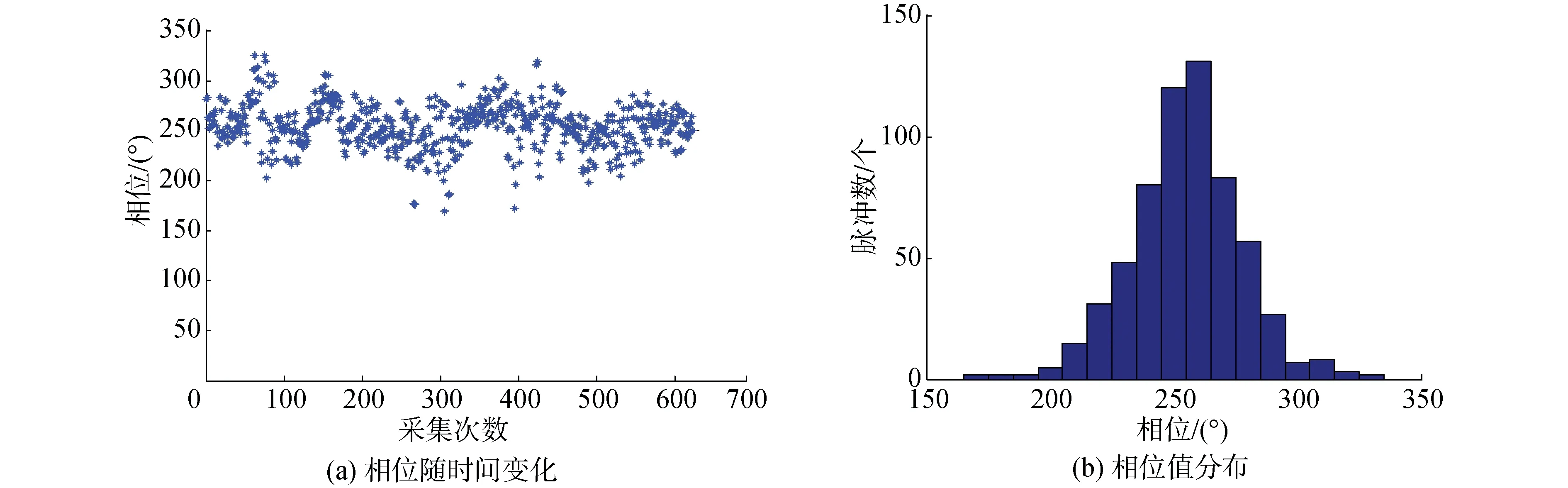
图6 2 kHz差频波的相位测试结果Fig.6 DW phase test results at 2 kHz
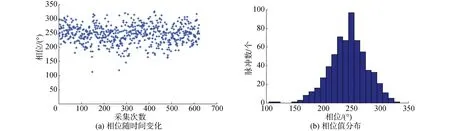
图7 根据监测位置修正的2 kHz差频波相位Fig.7 Modified DW phase based on measured position at 2 kHz

图8 500 Hz差频波相位随时间变化及频谱Fig.8 DW phase with time and it′s spectra at 500 Hz
前述测量结果表明,涌浪带来水体的运动,导致水下传感器周期性摆动,使声波相位测量值出现较大范围的变动,相位起伏的数值范围与频率成正比。而由于气泡导致的相位变化淹没在水听器位置周期性摆动中。在没有固定装置的条件下,在海上直接测量参量阵远场相位,无法研究介质微结构带来的相位变异。
较大的相位起伏周期与文献[3]中得到0.2~0.26 Hz的结果相同。但文献[3]中将其归结为内波导致的介质微结构变化,没有考虑到海底接收阵的摆动因素。
3 相位的信号比较测量
由于气泡的浮升机制,海水中难以存在数百微米的气泡[11],低频声波的散射和传播影响不大。可以同频的低频声波为参照对比研究参量阵声场。
研究换能器轴向方向,常规低频声源辐射波声场表示为:
(7)
式中:ω=ωd。如图9所示,参量阵与低频声源同时、同位工作时,由于波数的差异,在距离r处,水听器测得的相位差为:
Δc=c1-c0,Δφ=φ0-φd
(8)

图9 相位的信号比较法测量示意Fig.9 Schematic diagram of phase measurement by signal comparison method
式(8)表明,对于声速均匀介质,差频波与同频低频波处处同相(不计初相);对于声速频散介质,差频波与同频低频波的相位差随传播距离成正比;对随机介质,传播距离将放大相位差的起伏。
2种声波同步发射,采用(8)式的确可避免距离起伏问题。但外场测量中,由于相位、信噪比的时变性,采用分时(延时)发射、分别测量的方法可能是唯一选择。由于水听器位置的时变性,延时发射同样导致相位差起伏。对在T周期变动幅度为d的水听器,延时Δt导致的相位差为:
(9)
对应第2节中的测试情况(T=4 s,d=0.2 m)当Δt=10 ms时,4 kHz声波相位的差异约为1°。考虑设备和技术的综合因素,式(8)应为:
(10)
其中仅第1项为本研究关注的数值,后面2项分别为设备初相位差和时延偏差。采用同一类型信号以相同的时延测试,Δc=0,可剥离介质声速频散的因素,获取时延偏差,矫正发射和接收设备的初相差。
采用参量阵,延时10 ms发射2 ms宽度的脉冲,以“纯净”的直达波矫正,如图10。延时器存在4 μs的固定偏差,对应4 kHz初相偏移为Δφ=5.8°。而由于涌浪导致的随机起伏为±(1°~2°),与式(9)的预估相符(图11)。
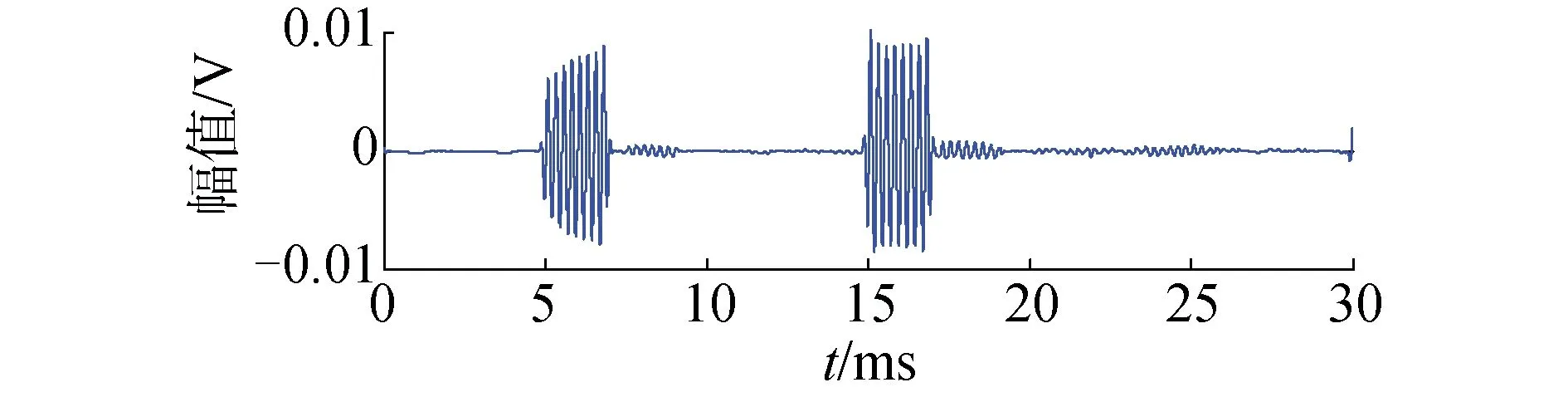
图10 延迟10 ms发射的参量阵信号Fig.10 Parametric array signal with delay of 10 ms
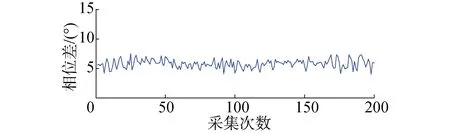
图11 信号延时和初相位差导致的测量偏差Fig.11 Measurement deviation caused by signal delay and initial phase difference
4 相位的距离比较测量
海上在远离声源的远场保持稳定的传播距离极其困难,除非声源和接收器均固定在海底。但远场中2只水听器的相对固定是容易做到的。为此可在第3节中通过信号比较测量相位的基础上,进一步采用两接收器的比较法测量[12]。
在图9的基础上增加一只水听器,如图12所示,参量阵声源与常规声源同步发射,传播方向上分置的水听器分别测量2列声波在介质传播中产生的相位差。
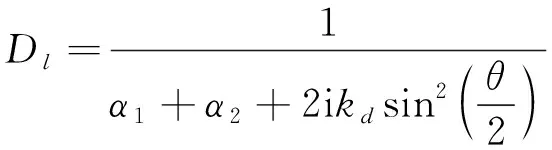
对远场r2、r1距离上间距d的2只水听器,分别测量的数值相减,由(8)式得:
(11)
在秒级以下的时间间隔,在参量阵工作的局部水域,认为海水介质水平均匀分布,则:
(12)
该数值为差频波与低频声源的相对相位的差值,为与前述相位差的称谓区分,简称其为“相对相位差”。对于均匀介质,差频波与低频波相位差与距离无关,相对相位差为零;对于声速频散介质,相对相位差与水听器间距成正比。
两接收器刚性固定或间距保持稳定是容易做到的。与式(10)对比,无需考虑测试装置在海中的位置变动和测试设备初相问题,降低了测试不确定度。与图10的试验条件相同,在5 m后增设了一只水听器进行数据校核,2水听器波形时序如图13所示。

图12 相对相位差测量示意Fig.12 Schematic diagram of relative phase difference measurement

图13 间隔5 m水听器接收到延迟10 ms发射的信号波形Fig.13 Waveform received of 5 m interval hydrophones with transmitted delay of 10 ms
如图14所示,同一信号延迟10 ms发射,由于水听器位置变异导致的信号相位差Δφ1,2的偏差为1.0°~2.0°,但由于两水听器同步摆动,相对相位差Δφr的测试不确定度并未增大。同步延迟4 μs的固定差值,导致5.8°的相位差异,在水听器测量的相位差Δφ1,2数值中有体现,但在相对相位差计算中归零。不计信噪比和多途散射等环境因素,该校核数值即为测量方法的测量不确定度。
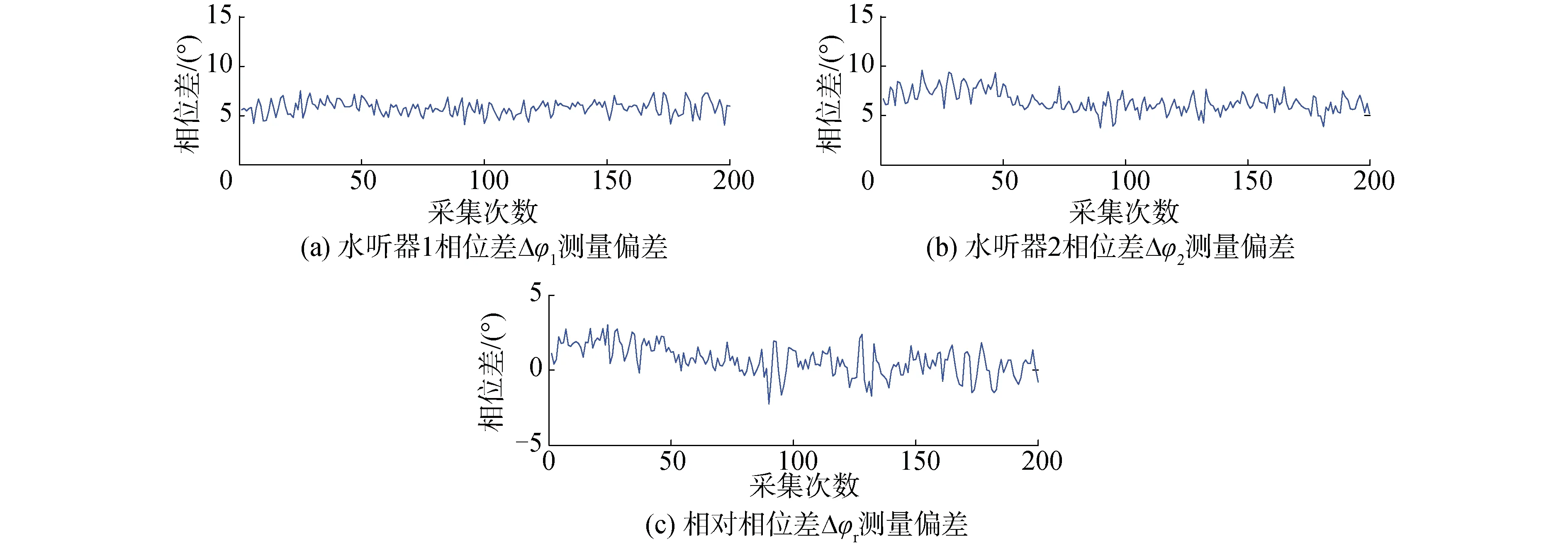
图14 相对相位差Δφr测量不确定度Fig.14 Measurement uncertainty of relative phase difference
同第2节的测试条件相同,增加一常规换能器和水听器,如图15。水听器与参量阵之间的距离分布为3.6 m、6.3 m。2只水听器的力学配置相同,保证了水听器相对距离稳定。
各脉冲的处理数据如图16所示,测量值在36.0°~53.0°。由于夏季南风导致外海输入的涌浪拍打直堤,测试水域可视为充分搅拌的含气泡海水介质。相对相位差数值高(均值45°),且存在强烈起伏可视为富含气泡海水的鲜明特征。
在气泡含量小的水域测量现象有所不同。11月份半封闭的港湾,停泊的测量船为测试平台,如图17所示,水深8 m,工作深度4 m。港湾内涟漪、涌浪幅度较小。气泡来源主要是周期性涌浪拍打码头、船舷卷入的空气。水听器距声源的距离分别为7.4 m、12.5 m。
各脉冲的测试数据如图19所示。差频波相对相位差为13.0°,数据起伏在9.0°~17.0°。由于冬季海况良好,港内海水气泡含量少,数据均值及其起伏程度低于开放码头水域数值。
图15 开放码头测试示意Fig.15 Test schematic diagram at open wharf

图16 夏季开阔海域传播2.7 m测量值Fig.16 Results at space interval 2.7 m over open sea in summer
图17 半封闭的港湾船上试验Fig.17 Test on ship in semi closed harbor

图18 半封闭港湾内的海况Fig.18 Sea state in harbor
图19 冬季港湾内差频波传播5.1 m 相对相位差Fig.19 Results at space interval 5.1 m over harbor in winter
5 结论
1)参量阵差频波由高频原波在介质内互作用产生,高频声速对含气泡海水的敏感性导致了差频波相位的起伏与变异。
2)涌浪是导致传感器位置变动的主要原因。由于相位对传播距离的高度敏感,直接测量时,差频波相位随涌浪周期性大幅度起伏,难以发现由于介质导致的相位变异。
3)引入低频比较信号,可得到差频波相位随介质微结构的起伏特性,但同时产生了引入设备的相位以及时延控制问题。利用2只水听器,通过测量差频波的相对相位差,消除了引入设备的相位、时延差异,得到了介质本身因素产生的相位数值。采用简易的软绳吊放技术,在比较法测量中,相位测量不确定度达到1.0°~2.0°。采用该方法得到了不同海洋环境中参量阵相位的变异数值。
