基于边缘检测和形态学的车牌检测算法
2020-12-14梁天泓
梁天泓

摘要:通过研究图像处理理论并合理选择相关方法,所设计的车牌检测算法使计算机能够自动定位摄像头拍摄画面中车辆的车牌号码。摄像头拍摄所得画面,经过边缘检测、形态學以及颜色交叉验证等图像处理方法,可将背景图像中的噪声和无关信息去除。最终可得到车牌外接长方形坐标并从原图像中取出,为之后的字符识别提供预处理。
关键词:自动定位;车牌检测;图像处理;边缘检测;形态学
中图分类号:TP181文献标识码:A
文章编号:1009-3044(2020)28-0205-03
在许多场景如小区闸口、商场停车库闸口、高速收费站中,为了减少人工成本或是提高执行效率,使计算机能够自动识别车牌号码是有必要的。一般地,识别过程可分为两个子过程:从摄像头拍摄到的画面中找到车牌,再识别车牌上的字符(即车牌号码)[1]。研究与实验将着重于第一个子过程,进行理论分析、算法设计和使用MATLAB实现。
1理论与方法
本文所述算法的核心思路是:车牌的样式、颜色、字体具有明显特征[2]。通过分析、提取这些特征从而使计算机可以独立地从复杂的自然背景中定位车牌位置。具体步骤可分为:读取图像;边缘检测;边缘腐蚀(形态学);边缘平滑处理(形态学);去除小对象;按颜色做交叉验证(可选);定位车牌。
1.1读取图像
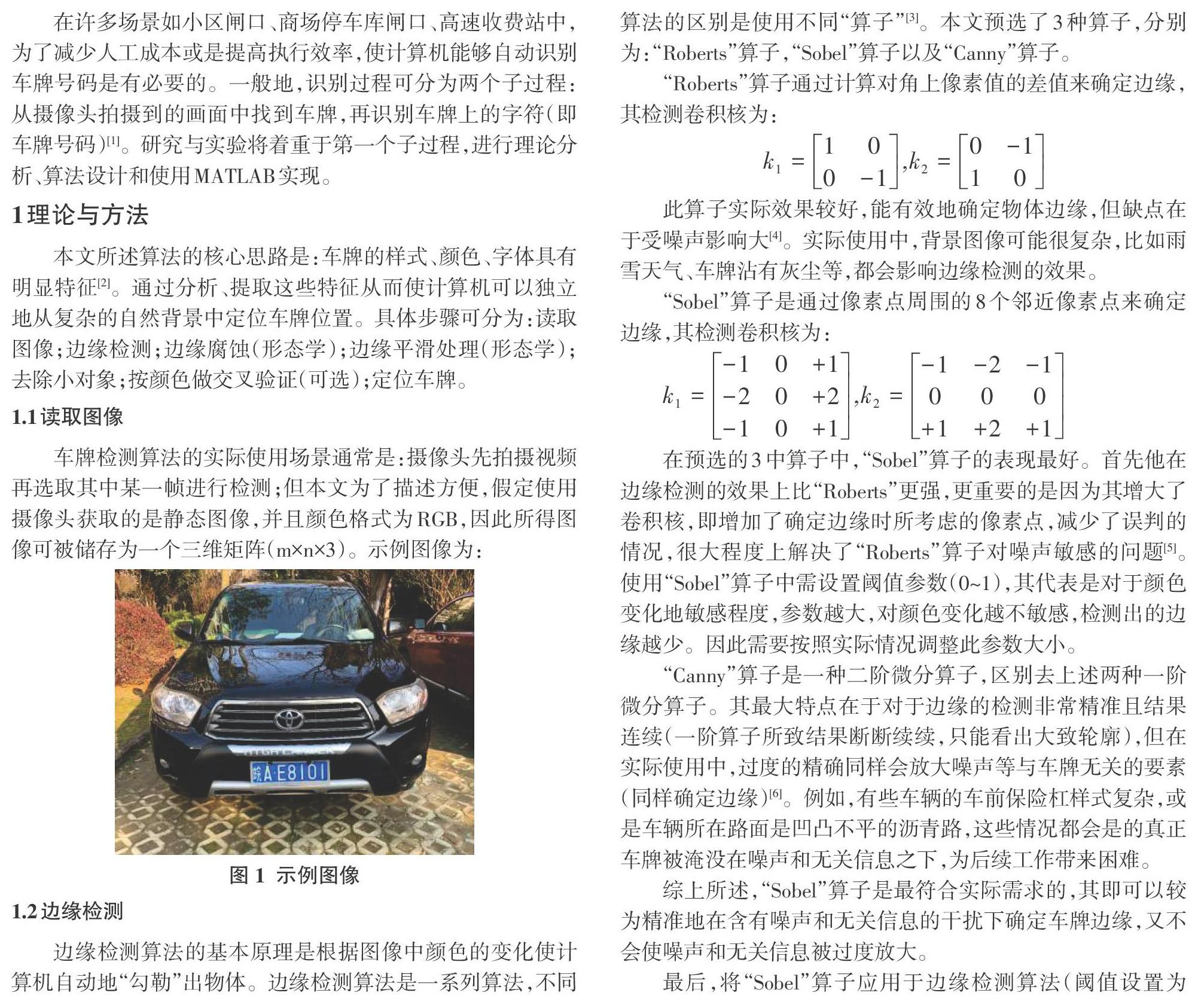
车牌检测算法的实际使用场景通常是:摄像头先拍摄视频再选取其中某一帧进行检测;但本文为了描述方便,假定使用摄像头获取的是静态图像,并且颜色格式为RGB,因此所得图像可被储存为一个三维矩阵(m×n×3)。示例图像为:
1.2边缘检测
边缘检测算法的基本原理是根据图像中颜色的变化使计算机自动地“勾勒”出物体。边缘检测算法是一系列算法,不同算法的区别是使用不同“算子”[3]。本文预选了3种算子,分别为:“Roberts”算子,“Sobel”算子以及“Canny”算子。
在预选的3中算子中,“Sobel”算子的表现最好。首先他在边缘检测的效果上比“Roberts”更强,更重要的是因为其增大了卷积核,即增加了确定边缘时所考虑的像素点,减少了误判的情况,很大程度上解决了“Roberts”算子对噪声敏感的问题[5]。使用“Sobel”算子中需设置阈值参数(0~1),其代表是对于颜色变化地敏感程度,参数越大,对颜色变化越不敏感,检测出的边缘越少。因此需要按照实际情况调整此参数大小。
“Canny”算子是一种二阶微分算子,区别去上述两种一阶微分算子。其最大特点在于对于边缘的检测非常精准且结果连续(一阶算子所致结果断断续续,只能看出大致轮廓),但在实际使用中,过度的精确同样会放大噪声等与车牌无关的要素(同样确定边缘)[6]。例如,有些车辆的车前保险杠样式复杂,或是车辆所在路面是凹凸不平的沥青路,这些情况都会是的真正车牌被淹没在噪声和无关信息之下,为后续工作带来困难。
综上所述,“Sobel”算子是最符合实际需求的,其即可以较为精准地在含有噪声和无关信息的干扰下确定车牌边缘,又不会使噪声和无关信息被过度放大。
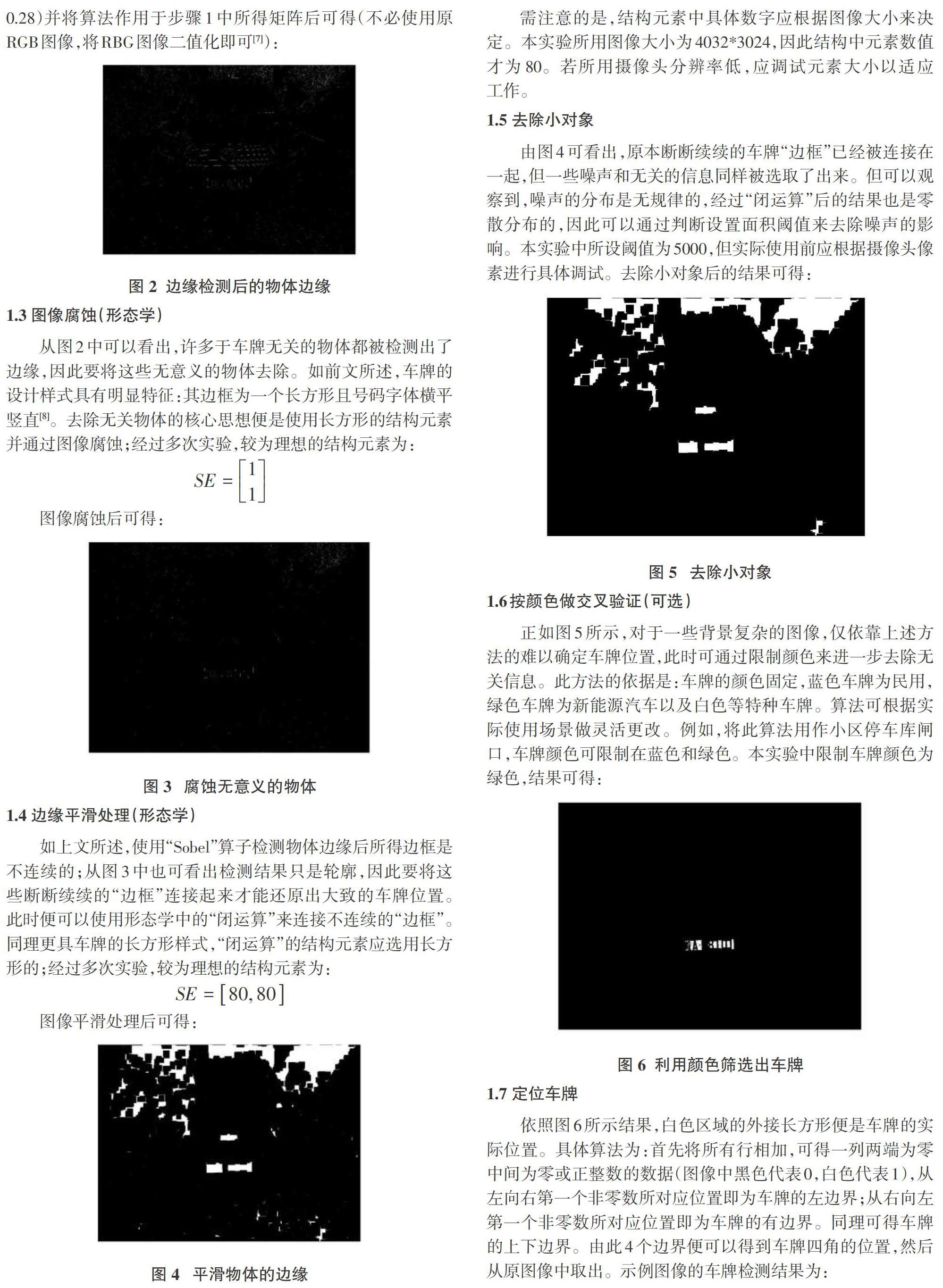
最后,将“Sobel”算子应用于边缘检测算法(阈值设置为0.28)并将算法作用于步骤1中所得矩阵后可得(不必使用原RGB图像,将RBG图像二值化即可[7]):
1.3 图像腐蚀(形态学)
从图2中可以看出,许多于车牌无关的物体都被检测出了边缘,因此要将这些无意义的物体去除。如前文所述,车牌的设计样式具有明显特征:其边框为一个长方形且号码字体横平竖直[8]。去除无关物体的核心思想便是使用长方形的结构元素并通过图像腐蚀;经过多次实验,较为理想的结构元素为:
1.4 边缘平滑处理(形态学)
如上文所述,使用“Sobel”算子检测物体边缘后所得边框是不连续的;从图3中也可看出检测结果只是轮廓,因此要将这些断断续续的“边框”连接起来才能还原出大致的车牌位置。此时便可以使用形态学中的“闭运算”来连接不连续的“边框”。同理更具车牌的长方形样式,“闭运算”的结构元素应选用长方形的;经过多次实验,较为理想的结构元素为:
需注意的是,结构元素中具体数字应根据图像大小来决定。本实验所用图像大小为4032*3024,因此结构中元素数值才为80。若所用摄像头分辨率低,应调试元素大小以适应工作。
1.5 去除小对象
由图4可看出,原本断断续续的车牌“边框”已经被连接在一起,但一些噪声和无关的信息同样被选取了出来。但可以观察到,噪声的分布是无规律的,经过“闭运算”后的结果也是零散分布的,因此可以通过判断设置面积阈值来去除噪声的影响。本实验中所设阈值为5000,但实际使用前应根据摄像头像素进行具体调试。去除小对象后的结果可得:
1.6按颜色做交叉验证(可选)
正如图5所示,对于一些背景复杂的图像,仅依靠上述方法的难以确定车牌位置,此时可通过限制颜色来进一步去除无关信息。此方法的依据是:车牌的颜色固定,蓝色车牌为民用,绿色车牌为新能源汽车以及白色等特种车牌。算法可根据实际使用场景做灵活更改。例如,将此算法用作小区停车库闸口,车牌颜色可限制在蓝色和绿色。本实验中限制车牌颜色为绿色,结果可得:
1.7 定位车牌
依照图6所示结果,白色区域的外接长方形便是车牌的实际位置。具体算法为:首先将所有行相加,可得一列两端为零中间为零或正整数的数据(图像中黑色代表0,白色代表1),从左向右第一个非零数所对应位置即为车牌的左边界;从右向左第一个非零数所对应位置即为车牌的有边界。同理可得车牌的上下边界。由此4个边界便可以得到车牌四角的位置,然后从原图像中取出。示例图像的车牌检测结果为:
2结论与改进
依照上述7个步骤,最后便可以成功地从复杂地背景图像中检测出车牌。需注意的是,在使用算子、平滑边缘和去除小对象时,需要根据摄像头所拍摄图像的大小调整参数。实际上本实验为了验证算法的可行性,选择了清晰度高(图像大)的图像进行测试,实际使用中如果摄像头分辨率小,检测效果会更好。另外,本文所述算法可针对整张图像进行检测,实际使用中可以只对部分图像进行车牌检测,即规定车辆需要开到指定位置或范围。
参考文献:
[1]Ahn C S,Lee B G,Yang S S,etal.Design of car license plate area detection algorithm for enhanced recognition plate[C]//2017 4th International Conference on Computer Applications and Information Processing Technology (CAIPT).8-10Aug.2017,Kuta Bali,Indonesia.IEEE,2017:1-4.
[2] Sa-NgamuangP,ThamnittasanaC,Kondo T.Thai car license plate recognition using essential-elements-based method[C]//2007 Asia-Pacific Conference on Communications.18-20Oct.2007,Bangkok,Thailand.IEEE,2007:41-44.
[3] Xu P F,Miao Q G,Liu TG,etal.Multi-direction edge detection operator[C]//2015 11th International Conference on Computational Intelligence and Security (CIS).19-20Dec.2015,Shenzhen,China.IEEE,2015:187-190.
[4] Wang AL,LiuX S.Vehicle license plate location based on improved Roberts operator and mathematical morphology[C]//2012 Second International Conference onInstrumentation,Measurement,Computer,Communication and Control.8-10Dec.2012,Harbin,China.IEEE,2012:995-998.
[5] Zhang Y, Han X, Zhang Het al.Edge detection algorithm of image fusion based on improved Sobel operator[C]//2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, 2017:457-461.
[6] RamyaR,Babu P S.Automatic tuberculosis screening using canny Edge detection method[C]// 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, 2015:282-285.
[7] Baoya Z, Caiqiao W, Huifeng K, et al.Binarization Method of Steel Tape Based on Edge Detection[C]//2013 Fifth International Conference on Measuring Technology and Mechatronics Automation, Hong Kong, 2013:341-344.
[8] Perumal E, Arulandhu P.Multilevel morphological fuzzy edge detection for color images (MMFED)[C]//2017 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), 2017:269-273.
【通聯编辑:唐一东】
