WiFi环境下多功能轮椅床研究与设计
2020-12-14周小华吴涛杨丛丛
周小华 吴涛 杨丛丛
摘 要: 利用树莓派软件设计并开发了一种WiFi环境下的遥控多功能轮椅床,智能手机作为多功能轮椅的主要控制终端,以树莓派为基础作为该多功能轮椅床的核心控制器,其中控制系统的程序采用Python语言进行开发。树莓派对舵机的控制可实现多功能轮椅床的转换变形,同时树莓派对电机的控制实现多功能轮椅的移动,通过超声波测距模块可以实时监测多功能轮椅与周边的情况,实现相应的自主避障功能。该多功能轮椅主要由轮椅床底盘模块、电机驱动模块和超声波测距等多个功能模块构成。多功能轮椅与智能手机之间的通信方式采用WiFi通信,用户能够使用智能手机远程遥控来实现多功能轮椅的转换变形、移动和避障等。
关键词: 多功能轮椅;树莓派;电机驱动;超声波避障;WiFi
中图分类号: TP242.3 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.09.038
【Abstract】: Using Raspberry Pi software to design and develop a remote control multifunctional wheelchair bed under WiFi environment, the smartphone is the main control terminal of the multifunctional wheelchair, and the Raspberry Pi is used as the core controller of the multifunctional wheelchair bed. The program of the control system is developed using Python language. The control of the raspberry party steering gear can realize the transformation and deformation of the multifunctional wheelchair bed. At the same time, the control of the raspberry party motor can realize the movement of the multifunctional wheelchair. The ultrasonic ranging module can monitor the situation of the multifunctional wheelchair and its surroundings in real time to achieve the corresponding autonomous obstacle avoidance function. The multifunctional wheelchair is mainly composed of multiple functional modules such as a wheelchair bed chassis module, a motor drive module, and ultrasonic ranging. The communication method between the multifunctional wheelchair and the smartphone uses WiFi communication, and users can use the smartphone to remotely control the transformation, movement, and obstacle avoidance of the multifunctional wheelchair.
【Key words】: Multifunctional wheelchair; Raspberry Pi; Motor drive; Ultrasonic obstacle avoidance; WiFi
0 引言
伴随着人口老龄化的问题日渐突出,体弱的老年人士的生活状态也越来越被人们关注和重视,尤其在出行和自由活动方面。因此本次设计针对该问题,采用智能手机在WiFi的环境中可以远程控制多功能轮椅的转换变形、移动和避障。采用树莓派(RaspberryPi)作为多功能轮椅的“大脑”,可通过编程来管理多功能轮椅的操作(转换变形、移动等)。本次设计旨在服务那些下半身瘫痪人群、腿脚行动不便人群和体弱的老年人士,通过远程控制多功能轮椅实现从床上到轮椅上,并能在无人照看情况下进行基本的活动,能够满足这些特殊人群的日常生活。
1 硬件选择与设计
1.1 结构设计
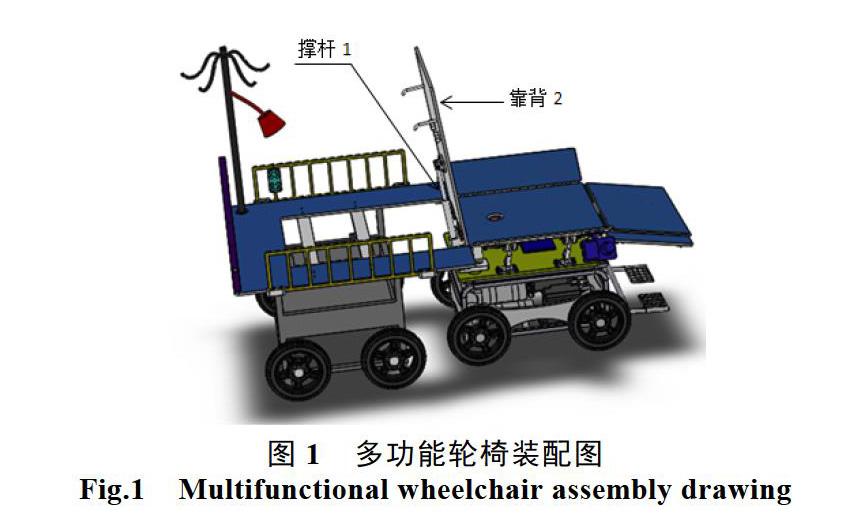
采用SolidWorks軟件对该多功能论文进行的三维建模如图1所示,从图1中可以看出,当撑杆1推出的时候,病床的底板撑起,变形成轮椅靠背2;撑杆1收回的时候,靠背2变形为床板。
1.2 电机驱动模块
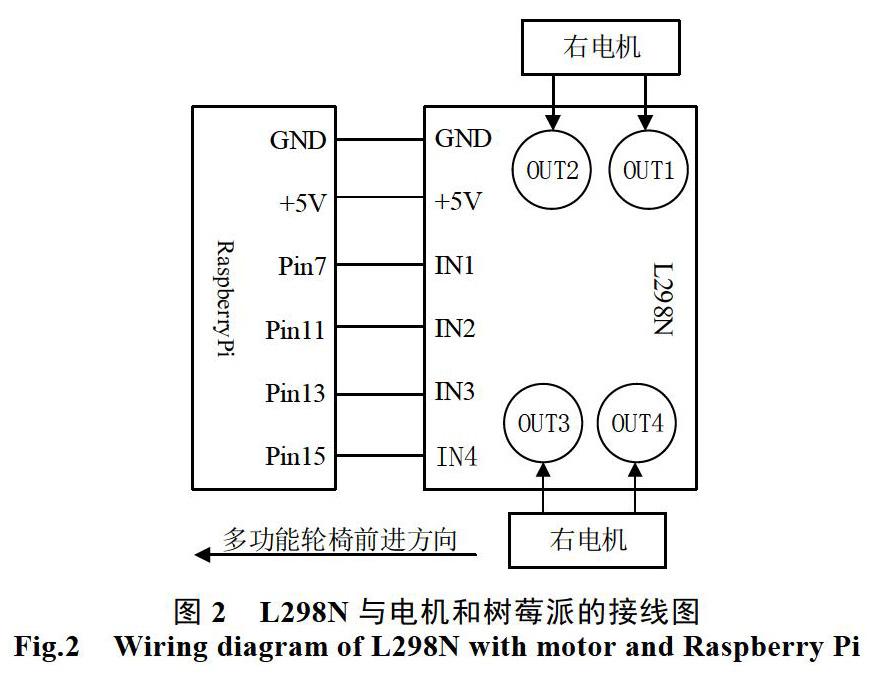
图1中前面的轮椅部分的4个轮子的驱动直流电机与相应的电机驱动模块L298N连接,驱动模块L298N通过树莓派自带的GPIO口进行控制[1]。电机的正反转由电机输入信号的逻辑关系来决定,其速度通过使能端ENA、ENB输入PWM信号来控制和调节[2]。如图2所示为电机、L298N模块和树莓派的连接方式。L298N模块的逻辑输入端为IN1~IN4,这4端口分别与树莓派的4个GPIO口相连。
1.3 轮椅转换变形模块
(1)轮椅转换变形驱动模块设置
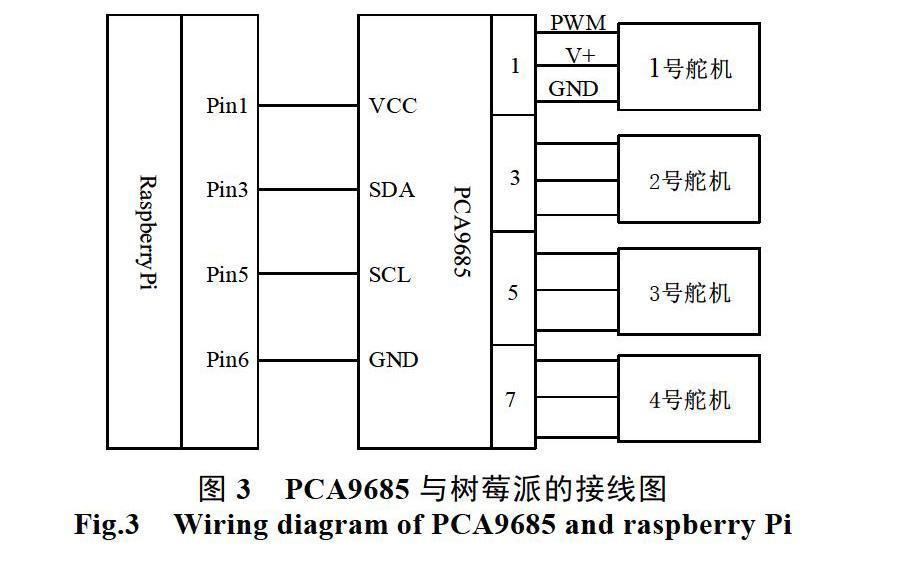
轮椅转换变形模块需要四个舵机分别驱动其对应的零件的转动,选用驱动电路板PCA9685与舵机连接的接线图如图3所示。四个舵机分别连接在型号为PCA9685的舵机驱动板上,舵机驱动板同时与树莓派连接。轮椅车底盘是固定的,1号舵机能够控制多功能轮椅背椅的转动,2号和3号舵机分别控制多功能轮椅左扶手和右扶手的转动,而多功能轮椅脚踏板的运动通过4号舵机进行控制。最后,多功能轮椅的转换变形由1至4号伺服舵机的控制来实现。
1.4 避障功能
本文所设计多功能轮椅的避障原理是:首先初始化及超声波模块及树莓派的GPIO端口,然后由控制器发送触发电平并读取返回电平。接着通过计算与障碍物的距离来判断是否有障碍物,若计算距离大于10 cm,则判断前方有障碍物,否则无障碍物[6]。在避障模块的设计中利用超声波模块和对树莓派进行编程,最终实现轮椅的避障功能。
2 多功能轮椅的运动控制
2.1 控制系统总体设计方案
通过WiFi使用者将操作指令经由树莓派发送给各功能模块,使多功能轮椅完成相应的操作,本次设计中多功能轮椅床的系统结构框图如图4所示。
3 结语
本文设计并开发了一种基于树莓派的无线遥控多功能轮椅,可实现多功能轮椅的转换变形、移动和避障。树莓派作为核心主控板,通过L298N实现利用电机控制多功能轮椅的移动,通过PCA9685实现利用舵机控制多功能轮椅的转换变形,通过WiFi模块与手机交换信号,实现手机远程控制多功能轮椅,通过超声波测距模块来实现多功能轮椅在移动的过程中自主的躲避障碍物。实验表明多功能轮椅具有较好的远程控制、转换变形和自主避障功能,在智能化的轮椅中具有一定的实用创新价值。该多功能轮椅系统简单,精度较高,实用性较强,为多功能轮椅实现现实生产提供了理论依据。
參考文献
[1]凡佳辉, 刘冉, 韩飞, 等. 基于树莓派的智能机器人控制研究[J]. 信息技术与信息化, 2018(04): 142-144.
[2]胡志超, 孔锦明, 魏豪特. 基于树莓派的移动监控小车设计[J]. 科技广场, 2017(12): 78-80.
[3]李强, 霍淑珍, 郑伟. 基于I2C通信的PCA9685在舵机控制中的应用[J]. 科技创新与应用, 2018(28):173-174.
[4]周英路, 王志亮, 朱松青, 等. 基于PCA9685的多路舵机控制器设计[J]. 南京工程学院学报(自然科学版), 2017, 15(04): 26-31.
[5]杨丛丛, 吴涛, 张安峰, 等. 基于树莓派的无线遥控移动机器人设计及运动控制[J]. 软件, 2020, 41(02): 97-101.
[6]刘胜金, 周海燕, 杨溢凡, 等. 基于树莓派的智能小车系统[J]. 电脑知识与技术, 2019, 15(14): 158-160.
[7]胡志超, 孔锦明, 魏豪特. 基于树莓派的移动监控小车设计[J]. 科技广场, 2017(12): 78-80.
[8]王小宇. 基于Raspberry Pi的轮式移动机器人设计及运动控制[D]. 山东理工大学, 2018.
[9]江国强, 谢安洁, 漆虹琳, 等. 基于Arduino的舵机机械控制研究[J]. 企业科技与发展, 2020(04): 39-41.
[10]孟祥薇, 严锡君, 欧阳星辰, 等. 基于超声波传感器的导盲杖设计[J]. 电子设计工程, 2012, 20(17): 11-14.
[11]吴波涛, 孔金平, 王湘. 基于Arduino和树莓派的智能小车的设计与实现[J]. 电子设计工程, 2017, 25(15): 58-61.
